Clear Sky Science · de
Bezahlbarer, 3D-gedruckter miniaturisierter Robotergreifer mit integrierter Kamera für visuelle Kraft- und Momentmessung
Warum winzige weiche Greifer wichtig sind
Roboter werden kleiner und übernehmen immer feinere Aufgaben, vom Zusammenbau winziger Zahnräder bis zum Pflücken reifer Beeren, ohne sie zu zerquetschen. Die meisten Roboterhände drücken jedoch noch weitgehend blind und haben wenig Gefühl dafür, wie stark sie drücken. Dieser Artikel stellt einen kostengünstigen, 3D-gedruckten Miniaturgreifer vor, den die Autoren „Seezer“ nennen: Er kann zerbrechliche Objekte greifen und gleichzeitig Kräfte „fühlen“, indem eine winzige Kamera in seinen Fingerspitzen statt teurer Kraftsensoren eingesetzt wird.
Eine sanfte Hand, die sieht
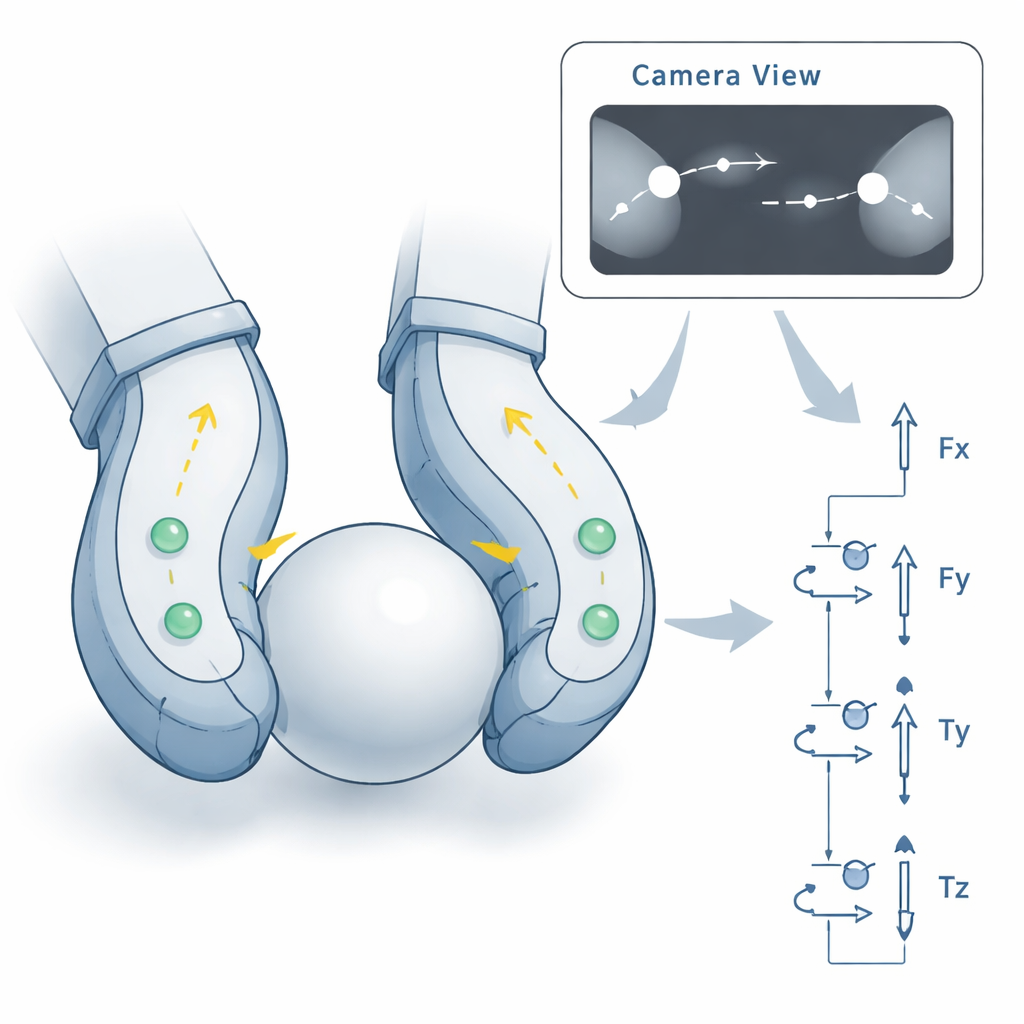
Der Seezer ist ein weicher, nachgiebiger robotischer Greifer, dessen Finger sich biegen statt wie Metallzangen an Gelenken zu schwenken. Die zentrale Idee ist, nahezu alles in einem Stück auf einem handelsüblichen 3D-Drucker herzustellen: ein monolithisches Fingerteil mit flexiblen Gelenken, fingertippspezifischen Formen und kleinen eingebauten Markierungen. Dieses Einweg-Fingermodul schiebt sich auf eine kompakte Motorbaugruppe, die eine Miniaturkamera und Beleuchtung enthält. Dreht der Motor eine Schnecken‑Übersetzung, biegen sich die flexiblen Gelenke und die Finger schließen sich um ein Objekt, während die Kamera die Fingerspitzen und den Raum vor dem Greifer beobachtet.

Kräfte aus Fingerbiegungen ablesen
Anstatt Drähte, Dehnungsmessstreifen oder Drucksensoren in die Finger einzubetten, versehen die Entwickler das Innere mit informationsreichen visuellen Hinweisen. Jede Fingerspitze trägt kleine runde „Fiducial“-Marker, deren Positionen im Kamerabild sich verändern, sobald sich der Finger verformt. Die Software erkennt und verfolgt diese Marker in jedem Frame. Auf Basis einer kurzen Kalibriergsequenz lernen einfache mathematische Modelle dann, wie Verschiebungen der Markerpositionen mit den tatsächlichen Schub‑ und Zugkräften an jeder Fingerspitze zusammenhängen. Durch Kombination der drei Fingerspitzenkräfte mit grundlegender Physik schätzt das System die Gesamtkräfte und -momente am Greifer in allen sechs Freiheitsgraden sowie die Zwischen-Finger‑Quetschkraft.
Wie gut es Kräfte fühlt
Um die Genauigkeit dieser kamerabasierten Messung zu prüfen, verglichen die Autoren die Seezer‑Schätzungen mit Messwerten eines hochpräzisen kommerziellen Kraft-/Momentensensors in einem kontrollierten Laboraufbau. Bei einer Ausführung des Fingerdesigns (steifere Spitzen) maß der Greifer Greifkräfte bis etwa 1,1 Newton mit typischen Fehlern zwischen 8 % und 17 %; die vollständigen Sechsachsen‑Kräfte und -Momente lagen meist in einem Fehlerbereich von 8 % bis 24 %. Eine Version mit weicherer Fingerspitze tauschte maximale Kraft gegen höhere Sensitivität: Sie erzeugte geringere absolute Kräfte, aber vergleichbare prozentuale Fehler. Wichtig ist, dass die Modelle nur 31 bis 141 Kalibrierdatenpunkte benötigten — deutlich weniger als die tausenden Bilder, die Deep‑Learning‑Methoden für ganze Kamerabilder oft verlangen.
Von winzigen Zahnrädern bis zu weichen Beeren
Zwei Demonstrationsaufgaben zeigen, was dieser Greifer in der Praxis leisten kann. In der einen hob der Seezer wiederholt kleine 3D-gedruckte Zahnräder von Achsen, bewegte sie und setzte sie wieder ein; die interne Kamera wurde sowohl zur Ausrichtung der Nut des Zahnrads zur Achse als auch zur Überwachung der Fingerbewegung genutzt. Das ähnelt feiner industrieller Montage in beengten Bereichen. In einer anderen Aufgabe erntete der Greifer Johannisbeeren von ihren Stängeln. Dabei überwachte das System in Echtzeit seine geschätzte Greifkraft und stoppte den Schließvorgang, sobald eine voreingestellte Kraftschwelle erreicht war, sodass die Beere gepflückt, aber nicht zerquetscht wurde. Beide Beispiele liefen mit preiswerter Elektronik und zeigten, dass ein Design starre und weiche Objekte im Millimeterbereich handhaben kann.
Herausforderungen und zukünftige Anwendungen
Der Seezer ist noch ein Proof of Concept und hat Einschränkungen. Das Marker‑Tracking funktioniert am besten in ruhigen, gut ausgeleuchteten Szenen mit unauffälligem Hintergrund; wechselnde Beleuchtung, glänzende Oberflächen und komplexe Bewegungen können Verfolgungsfehler verursachen. Die moderate Bildrate der Kamera limitiert außerdem, wie schnell das System bei straffem Kraftregelungsbedarf oder für reichhaltiges haptisches Feedback reagieren kann. Materialspezifische Ermüdung oder Verhaltensänderungen der Finger über längere Nutzung sind möglich, und das Team hat die Langzeitstabilität noch nicht systematisch geprüft. Die Autoren argumentieren, dass robustere Tracking‑Algorithmen oder die Kombination ihrer Hardware mit modernen Deep‑Learning‑Kraftschätzern Genauigkeit und Zuverlässigkeit verbessern könnten, während Fortschritte im 3D‑Druck weitere Miniaturisierung und sterilisierbare Einweg‑Fingerspitzen für chirurgische oder labortechnische Anwendungen ermöglichen sollten.
Was das für die Alltagsrobotik bedeutet
Kurz gesagt zeigt diese Arbeit, dass eine kleine, preiswerte Roboterhand durch Beobachtung der eigenen weichen Finger sowohl sehen als auch fühlen kann. Mit nur moderatem Kalibrieraufwand und Standardbauteilen schätzt der Seezer, wie stark er zudrückt und in welche Richtungen Kontaktkräfte und -momente wirken — genau genug für schonende Handhabungsaufgaben. Verbessert man die Robustheit, könnte derselbe Ansatz künftigen Robotern helfen, kleine, fragile Gegenstände zu handhaben — etwa medizinische Geräte, Elektronik, Obst oder sogar Gewebe bei minimalinvasiven Eingriffen — ohne sperrige Sensorik oder komplexe Hardware und so empfindlichen Tastsinn dorthin bringen, wo Platz und Kosten knapp sind.
Zitation: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Schlüsselwörter: weicher robotischer Greifer, visuelle Kraftmessung, 3D-gedruckte Robotik, miniaturisierte Manipulation, haptisches Feedback