Clear Sky Science · de
Fortschritte in der Weichrobotik: neuere Entwicklungen bei dielektrischen Elastomer- und Fluidaktoren
Weiche Roboter, die sich mehr wie Muskeln bewegen
Stellen Sie sich einen Roboter vor, der ein Kind sicher umarmen, sich durch Trümmer in einem eingestürzten Gebäude zwängen oder ein schwaches Herz sanft massieren kann. Für solche Aufgaben müssen Maschinen sich biegen und dehnen wie lebendes Gewebe, nicht wie klapperndes Metall. Dieser Übersichtsartikel erklärt, wie eine neue Klasse „weicher“ elektrischer Muskeln – gefertigt aus gummiartigen Feststoffen und Flüssigkeiten – diese Vision näher an die Wirklichkeit bringt und welche Hürden noch zu überwinden sind, bevor sie das Labor verlassen und in den Alltag eintreten.
Von starren Motoren zu weichen elektrischen Muskeln
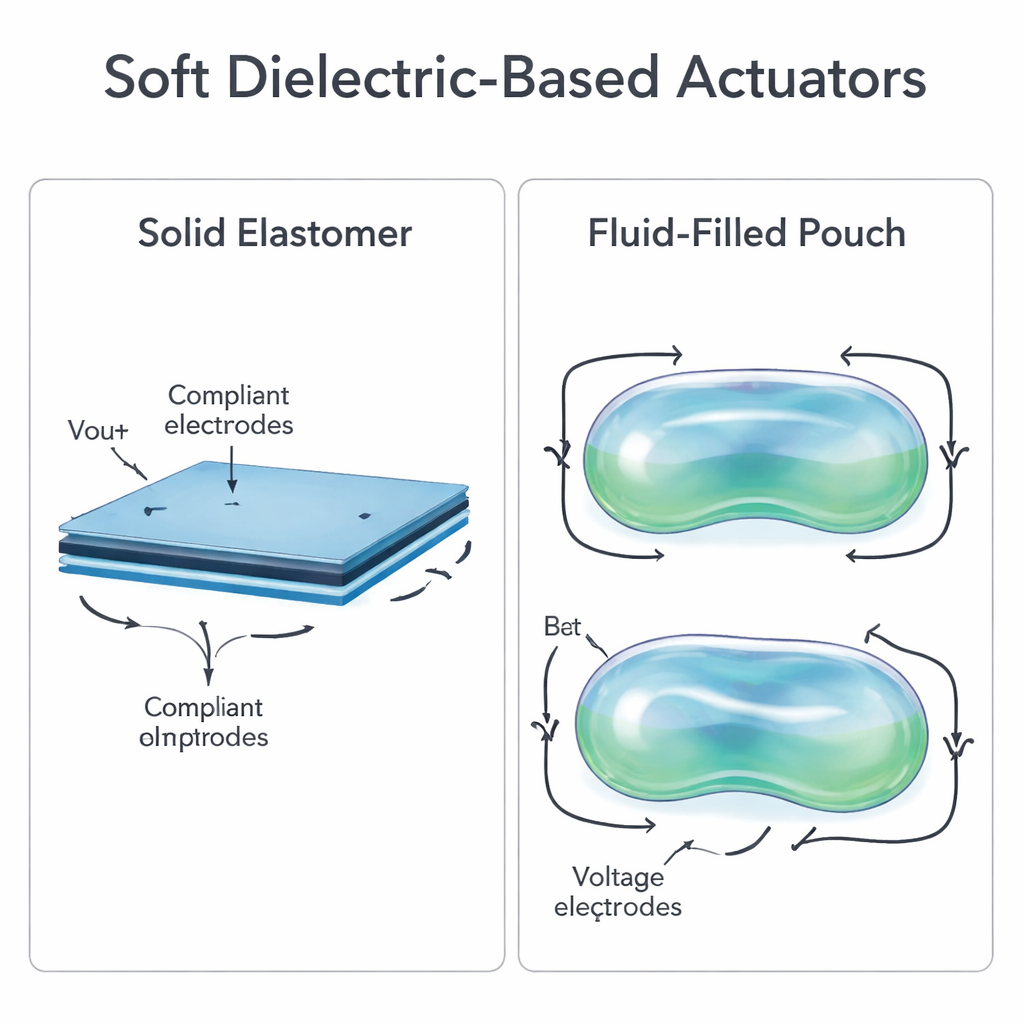
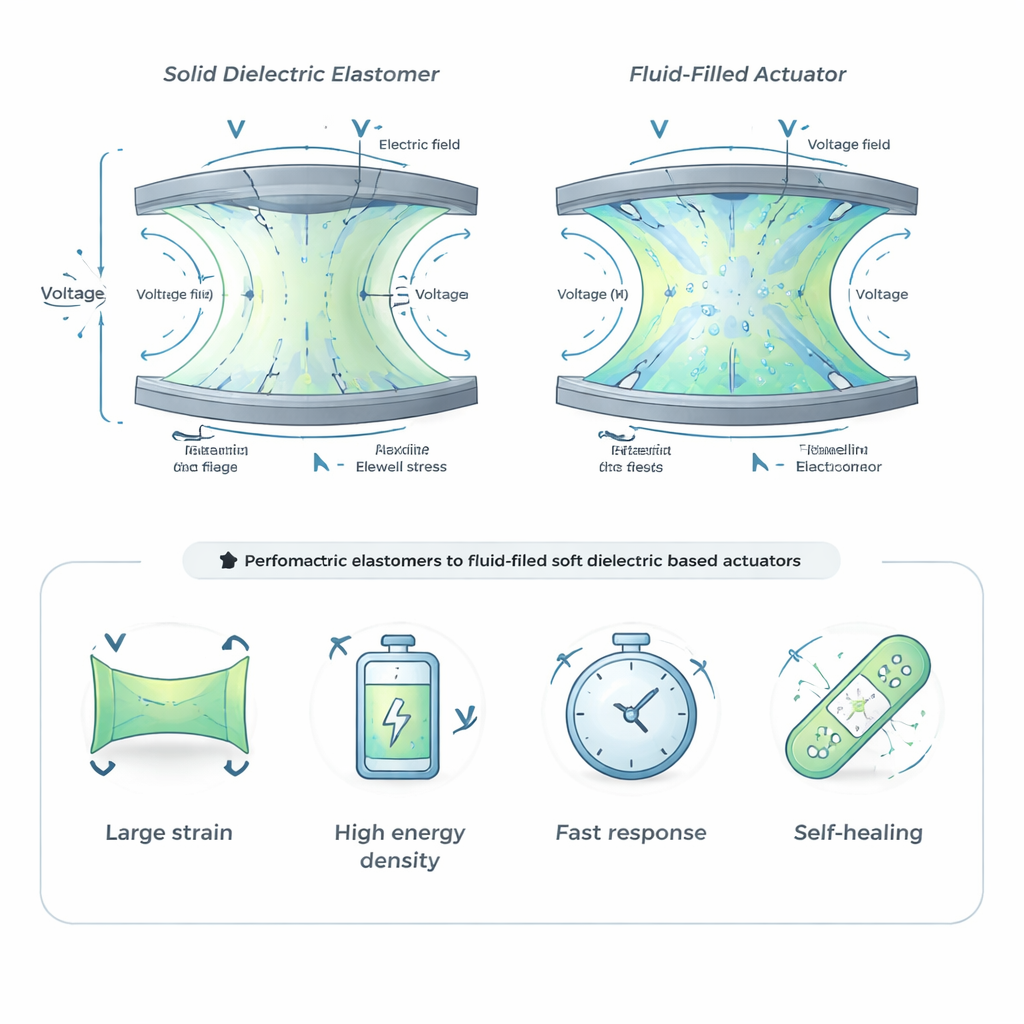
Die meisten Industrieroboter verlassen sich auf schwere, starre Motoren und Getriebe. Sie sind leistungsstark und präzise, aber auch teuer, zerbrechlich und potenziell gefährlich für Menschen. Weiche Roboter, aufgebaut aus dehnbaren Materialien ähnlich wie Silikon-Backformen oder Gummibänder, tauschen rohe Kraft gegen Sanftheit, Anpassungsfähigkeit und Widerstandsfähigkeit. Der Schwerpunkt dieses Papiers liegt auf weichen Aktuatoren, die elektrisch angetrieben werden: dielektrische Elastomeraktuatoren (DEAs), die eine feste Gummischicht verwenden, und dielektrische Fluidaktuatoren (DFAs), die eine elektrisch isolierende Flüssigkeit in einer flexiblen Hülle nutzen. In beiden Fällen erzeugt das Anlegen einer Spannung zwischen zwei flexiblen Elektroden durch elektrostatische Kräfte eine Zusammendrückung des Materials und wandelt elektrische Energie direkt in Bewegung mit großen Dehnungen, hoher Energiedichte und schneller Reaktion um.
Wie die Materialien Muskeln funktionieren lassen
Damit diese Geräte wie nützliche Muskeln funktionieren, brauchen sie sehr spezifische Materialien. Bei DEAs muss die zentrale Gummischicht extrem weich sein, damit sie sich leicht dehnen lässt, dabei aber auch hohe elektrische Felder aushalten, ohne zu reißen oder zu kurzschließen. Forschende balancieren dieses Verhältnis mit zwei Hauptstrategien. Zum einen entwerfen sie neue Polymere – von Acrylaten, Silikonen und Polyurethanen bis hin zu exotischeren Blockcopolymeren –, die viele polare chemische Gruppen (die die elektrische Reaktion stärken) in flexiblen, niedersteifen Netzwerken bündeln. Zum anderen stellen sie Verbundwerkstoffe her, indem sie winzige Partikel oder Flüssigkeiten einmischen, die die Fähigkeit des Materials erhöhen, elektrische Energie zu speichern. Ähnliche Überlegungen leiten das Design von DFAs: Ingenieurinnen und Ingenieure wählen Öle und andere dielektrische Flüssigkeiten mit der richtigen Viskosität, Stabilität und Verträglichkeit mit dünnen Kunststoff- oder Silikonhüllen, sodass Spannung die Flüssigkeit schnell verschieben kann, um Auswölbungen, Stöße und Vibrationen zu erzeugen, ohne zu lecken oder chemisch zu zerfallen.
Weiche Aktuatoren in großem Maßstab bauen und antreiben
Diese cleveren Materialien in zuverlässige Geräte zu verwandeln ist eine eigene ingenieurtechnische Herausforderung. Traditionelle Fertigung umfasst oft mühsame Handarbeit: das Dehnen dünner Folien auf Rahmen, das Lackieren oder Bedrucken weicher Elektroden, das Stapeln von Schichten und – im Fall von DFAs – das Injizieren von Flüssigkeit und das Versiegeln der Hülle. Der Artikel gibt einen Überblick über neuere Herstellungsverfahren wie Inkjet- und Siebdruck, Extrusion faserähnlicher Muskeln und mehrmaterialige 3D-Druckverfahren, die Elektroden und Dielektrika in einem Durchgang auftragen können. Er erklärt auch, wie unterschiedliche Formen zu verschiedenen Bewegungen führen: flache Flächen, die sich vergrößern, Kuppeln, die aufpoppen, aufgewickelte Zylinder, die längs kontrahieren, und Strukturen, die sich biegen oder vibrieren. Weil diese Materialien altern, auslaufen oder durch elektrischen Durchschlag versagen können, fassen die Autorinnen und Autoren Lebensdaueruntersuchungen und häufige Ausfallmodi zusammen und heben den Vorstoß zu selbstheilenden Designs hervor, die sich nach einem Funken oder einer Durchstechung wieder erholen können.
Intelligenteres Regelungsverhalten und aufkommende Anwendungen
Wie natürliche Muskeln müssen auch weiche Aktuatoren gesteuert werden. Einfache Open-Loop-Schemata geben nur ein Spannungsmuster vor, das jedoch driftet, wenn sich das Material erwärmt oder kriecht. Fortgeschrittene Ansätze integrieren Sensoren – oder nutzen die elektrischen Signale des Aktuators selbst –, um Dehnung, Kraft oder Vibration in Echtzeit zu messen und das Ansteuersignal entsprechend anzupassen. Forschende experimentieren derzeit mit Maschinenlern- und Reinforcement-Learning-Reglern, die mit dem nichtlinearen, historiesensitiven Verhalten weicher Materialien umgehen können. Bei den Anwendungen bietet das Papier eine weite Landschaft: künstliche Muskeln, die Vielfaches ihres Eigengewichts heben, fisch- und insektenähnliche Roboter, die schwimmen oder fliegen, tragbare haptische Bänder und Fingertip-Pads für realistische Berührungsrückmeldung, Zoomlinsen und lichtformende Oberflächen inspiriert von Tintenfisch- und menschlichen Augen, formwandelnde Oberflächen sowie Konzeptgeräte für die Medizin, die eines Tages geschwächten Herzen oder gelähmten Gesichtern helfen könnten.
Was noch zwischen Labor-Demos und realen Robotern steht
Trotz ihres Potenzials stehen diese elektrischen Muskeln noch vor Hürden, bevor sie Haushaltshelfer, medizinische Implantate oder Massenmarkt-Wearables sicher antreiben können. Viele benötigen Betriebsspannungen im Kilovoltbereich, was Sicherheit und Elektronik kompliziert macht. Materialien, die in Kurzzeittests hervorragend abschneiden, können nach Millionen von Zyklen versteifen, austrocknen oder versagen. Die Fertigung ist oft zu langsam und inkonsistent für die Großserienproduktion. Und die meisten aktuellen Polymere lassen sich nur schwer recyceln oder biologisch abbauen. Die Autorinnen und Autoren argumentieren, dass Fortschritt vom Co‑Design über viele Ebenen abhängt: neue weiche Materialien, die niedrige Steifigkeit, hohe elektrische Reaktion, Robustheit und sogar Selbstheilung kombinieren; automatisierte, datengetriebene Fertigung und Prüfverfahren; sowie Regelungssysteme, die integrierte Sensorik und leichte KI nutzen. Zusammen könnten diese Verbesserungen Robotern der Zukunft Muskeln verleihen, die nicht nur stark und schnell, sondern auch sicher, anpassungsfähig und nachhaltig sind.
Zitation: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Schlüsselwörter: Weichrobotik, dielektrische Elastomer-Aktuatoren, dielektrische Fluid-Aktuatoren, künstliche Muskeln, haptische Schnittstellen