Clear Sky Science · de
Verschachteltes Interaktionsnetz verbessert die Reaktionsfähigkeit kollektiven Verhaltens
Wie Tiermassen so scharf synchron bleiben
Große Tiergruppen scheinen häufig so zu wenden, auszuweichen oder zu fliehen, als wären sie ein einziger Organismus. Dieser Artikel untersucht, wie die verborgene „Wer-folgt-wem“-Struktur innerhalb einer Fischgruppe — und in von ihr inspirierten Roboterschwärmen — es der gesamten Menge erlaubt, schnell und verlässlich zu reagieren, wenn sich die Bedingungen ändern.
Schichten der Führung innerhalb einer bewegten Masse
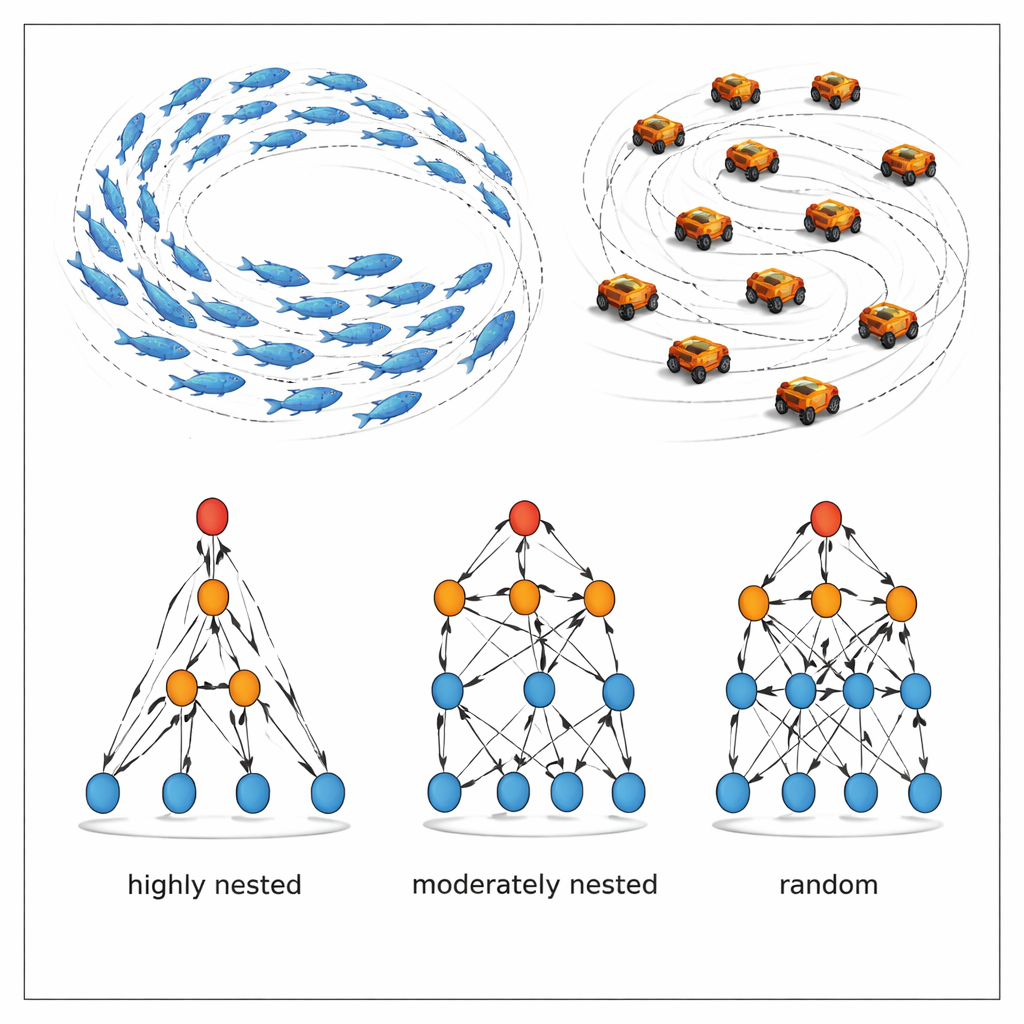
Wenn wir eine Fischschule sehen, die vor Gefahr davonwirbelt, liegt der Gedanke nahe, dass jeder Fisch einfach zugleich seine Nachbarn kopiert. Die Autorinnen und Autoren zeigen, dass die Realität subtiler ist: Es gibt ein unsichtbares Muster der Führung, in dem manche Fische viele andere beeinflussen und manche vor allem folgen. Dieses Muster ist keine starre Hackordnung, sondern ein flexibles Netz von Führer–Folgenden-Verbindungen, das sich mit der Art der Gruppenbewegung verändert. Das zentrale strukturelle Merkmal, auf das sich die Forschenden konzentrieren, nennt sich „Verschachtelung“: Führende auf höheren Ebenen lenken nicht nur ihre engsten Gefolgsmänner, sondern beeinflussen indirekt auch viele niedrigere Fische weiter unten in der Kette.
Was Fischschwärme über schnelle Manöver verraten
Das Team filmte kleine Schulen von Rummy‑nose-Tetras in einem flachen, kreisförmigen Becken und verfolgte Position und Richtung jedes Fisches über die Zeit. Aus diesen Trajektorien rekonstruierten sie, wer tendenziell zuerst bewegte und wer später reagierte, und bauten für jede Gruppe ein gerichtetes Einflussnetzwerk. Sie maßen außerdem, wie scharf die Schule sich drehte (Krümmung) und wie eng die Fische ausgerichtet waren (Polarisation). Sie fanden heraus, dass bei schnellen, zackigen Manövern mit häufigen Richtungswechseln das zugrunde liegende Netzwerk stark verschachtelt war: wenige Fische beeinflussten viele, und das Einflussmuster ähnelte einer sauberen dreieckigen Kaskade. Im Gegensatz dazu war das Netzwerk bei gleichmäßigem Gleiten in eine Richtung weniger verschachtelt und egalitärer, obwohl die Fische weiterhin gut ausgerichtet blieben.
Testen des Informationsflusses in idealisierten Netzwerken
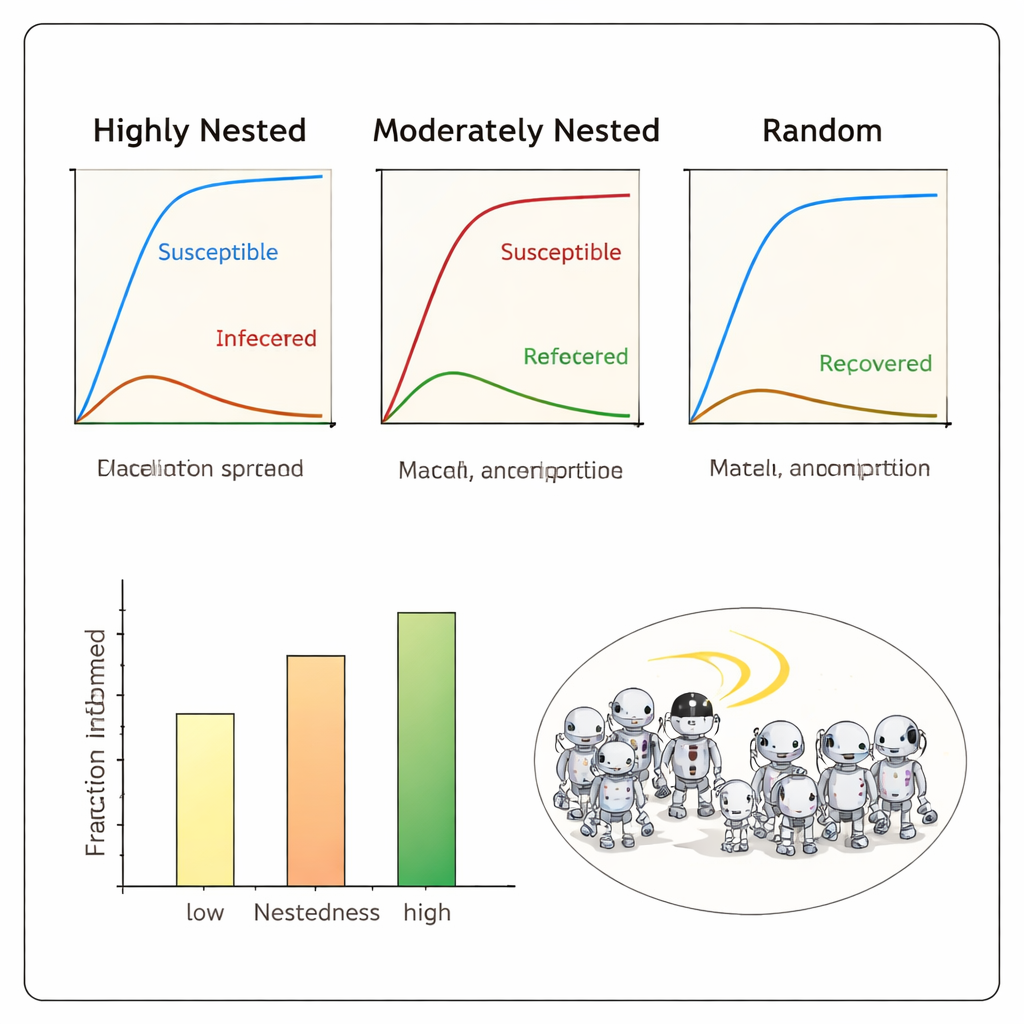
Um zu verstehen, warum verschachtelte Strukturen nützlich sein könnten, griffen die Autorinnen und Autoren auf ein einfaches Ausbreitungsmodell zurück, das oft bei Epidemien verwendet wird. Hier bedeutet ein „infizierter“ Knoten, dass er ein Richtungsignal aufgenommen hat und weiter überträgt, nicht eine Krankheit. Sie verglichen perfekt verschachtelte Führer–Folgenden‑Netzwerke mit teilweise verschachtelten und zufälligen Netzwerken, wobei die Gesamtzahl der Verbindungen gleich blieb. Im am stärksten verschachtelten Fall erreichte ein oben gestartetes Signal schnell fast jeden Knoten, und das sogar dann, wenn Knoten sich relativ schnell „erholten“ (aufhörten zu übertragen). Mit zunehmender Randomisierung und abnehmender Verschachtelung stockte das Signal: Viele Knoten blieben uninformiert, die maximale Anzahl aktiver Überträger sank, und das Modell benötigte deutlich mehr anfängliche Signalquellen, um dieselbe Abdeckung zu erzielen.
Von Gleichungen zu wendigen Robotermassen
Anschließend fragten die Forschenden, ob sich diese strukturellen Vorteile in tatsächliche Bewegungen übersetzen. Sie entwickelten ein „selbstangetriebenes“ Schwarmmodell, in dem jedes Individuum auswählt, wem es folgt, basierend darauf, wie auffällig die Bewegung eines Nachbarn wirkt — mit einer Wendung: Die Regel baut bevorzugt eine verschachtelte Hierarchie auf, in der auffälligere Bewegende für viele andere zu Führern werden. Dieses perfekt verschachtelte Schema verglichen sie mit zwei gängigen Alternativen: einer, in der jeder Nachbar gleich viel Gewicht hat, und einer, in der Einflüsse glatt nach Bewegungshinweisen gewichtet werden. In simulierten Gruppen, die wiederholt große, von wenigen informierten Individuen angeordnete Wendungen ausführen sollten, ermöglichte das verschachtelte Schema der Masse, das Zielkursmuster genauer und mit kleineren Verzögerungen zu erreichen, selbst wenn der Bewegung erhebliches Rauschen hinzugefügt wurde.
Reale Roboter verhalten sich wie Fischschwärme
Schließlich implementierten die Forschenden ihre verschachtelte Netzregel auf fünfzig kleinen Radrobotern, die sich in einer flachen Arena bewegten. In einer „Schwebe“-Aufgabe versuchte ein einzelner informierter Roboter, die Gruppe um eine Region kreisen zu lassen. Mit einer konventionellen, nach Nachbarn gewichteten Regel war die Schwarmbahn glatt und träge und zeigte nur sanfte Kurven. Mit der verschachtelten Regel führten die Roboter schärfere, entschlossenere Wendungen aus und verfolgten die Änderungen des informierten Roboters genauer. In einer „Folgen“-Aufgabe, bei der ein informierter Roboter unvorhersehbare Richtungswechsel ausführte, blieb der verschachtelt gesteuerte Schwarm erneut näher sowohl in Position als auch in Ausrichtung, während der Vergleichsschwarm viele Manöver glättete oder verpasste.
Warum das über Fische und Roboter hinaus wichtig ist
Anschaulich zeigt die Arbeit, dass es darauf ankommt, wie eine Masse verdrahtet ist, genauso sehr wie darauf, wie empfindlich ihre Mitglieder sind. Ein stark verschachteltes Einflussnetz — eine geschichtete Kette, in der Führende auf höheren Ebenen viele andere erreichen — lässt Gruppen schneller und verlässlicher auf wichtige Signale reagieren, ohne vom Rauschen überwältigt zu werden. Diese Einsichten können Biologinnen und Biologen helfen, Tierschwärme zu interpretieren, die Gestaltung von Drohnen- oder Unterwasserrobotik‑Teams leiten, die in riskanten Umgebungen schnell reagieren müssen, und sogar informieren, wie wir menschliche Netzwerke organisieren, wenn rasches, koordiniertes Handeln entscheidend ist.
Zitation: Zheng, Z., Tao, Y., Xiang, Y. et al. Nested interaction network enhances responsiveness in collective behavior. Commun Phys 9, 75 (2026). https://doi.org/10.1038/s42005-026-02510-0
Schlüsselwörter: kollektives Verhalten, Fischschwärme, Schwarmrobotik, Informationsübertragung, Netzwerkhierarchie