Clear Sky Science · de
Mehrstufiges Kalman-Filter-System zur Sensorfusion integriert mit MoS2-Memtransistor mit 1024 Leitfähigkeitsstufen
Intelligentere Sensorik für sicherere selbstfahrende Autos
Moderne selbstfahrende Fahrzeuge verlassen sich auf ein Netz aus Sensoren, um die Straße zu erfassen; doch all diese Informationen schnell und effizient zu vereinen ist ausgesprochen schwierig. Diese Studie zeigt, wie eine neue Art winziger elektronischer Bauelemente, sogenannte Memtransistoren, diesen Fusionsprozess beschleunigen und vereinfachen kann. Indem zentrale Berechnungen von sperrigen digitalen Chips in schlanke analoge Hardware verlagert werden, senken die Forschenden Energieverbrauch und Verzögerungen dramatisch und ebnen den Weg zu sichereren, reaktionsfähigeren autonomen Systemen, die mit schlechtem Wetter, verdeckten Sichtlinien und beengtem Straßenverkehr besser zurechtkommen.
Warum viele Augen besser sind als eines
Auf heutigen Teststrecken und Autobahnen blickt ein autonomes Fahrzeug mit einer Kombination aus Kameras, Laserentfernungsmessung (LiDAR), Millimeterwellenradar und Bewegungssensoren, die die Fahrzeugbewegung verfolgen, auf die Umgebung. Jeder dieser Sensoren hat seine Stärken und Schwächen: LiDAR kann durch Lkw oder Gebäude verdeckt werden, Radar hat Schwierigkeiten mit feinen Details, und Bewegungssensoren driften bei alleiniger Nutzung allmählich von der Wahrheit weg. Um ein verlässliches Bild des Verkehrs zu erhalten, muss das Fahrzeug diese unvollkommenen Sichtweisen zu einer konsistenten Schätzung zusammenführen, wo sich Objekte befinden und wie sie sich bewegen. Ein mathematisches Werkzeug namens Kalman-Filter hat sich dafür in Echtzeit bewährt; in herkömmlicher Form läuft er jedoch auf digitalen Prozessoren, die Energie verbrauchen und Verzögerungen verursachen, weil sie wiederholt Daten zwischen analogen Sensoren und digitaler Logik hin- und herschaufeln.

Ein neuer elektronischer Baustein
Das Team geht dieses Problem mit einem Bauelement an, das aus einer einzelnen Atomschicht des Halbleiters Molybdändisulfid (MoS2) gefertigt ist. Ihr Memtransistor vereint die Funktion eines Speicherelements und eines Transistors in einer dreipoligen Struktur, deren elektrische Leitfähigkeit sich fein abstimmen lässt und selbst bei abgeschalteter Stromversorgung erhalten bleibt. Durch gezielte Steuerung winziger Leerstellen im atomaren Gitter mittels elektrischer Felder kann das Bauelement zuverlässig 1024 unterscheidbare Leitfähigkeitsstufen über einen weiten Bereich halten und diese länger als ein Jahr bewahren. Ebenso wichtig ist, dass sich diese Stufen beim Durchfahren der Steuerspannung nahezu linear verändern, sodass sich ein gewünschtes mathematisches Gewicht im Kalman-Filter direkt auf eine physikalische Einstellung des Memtransistors abbilden lässt.
Mathematik in Hardware verwandeln
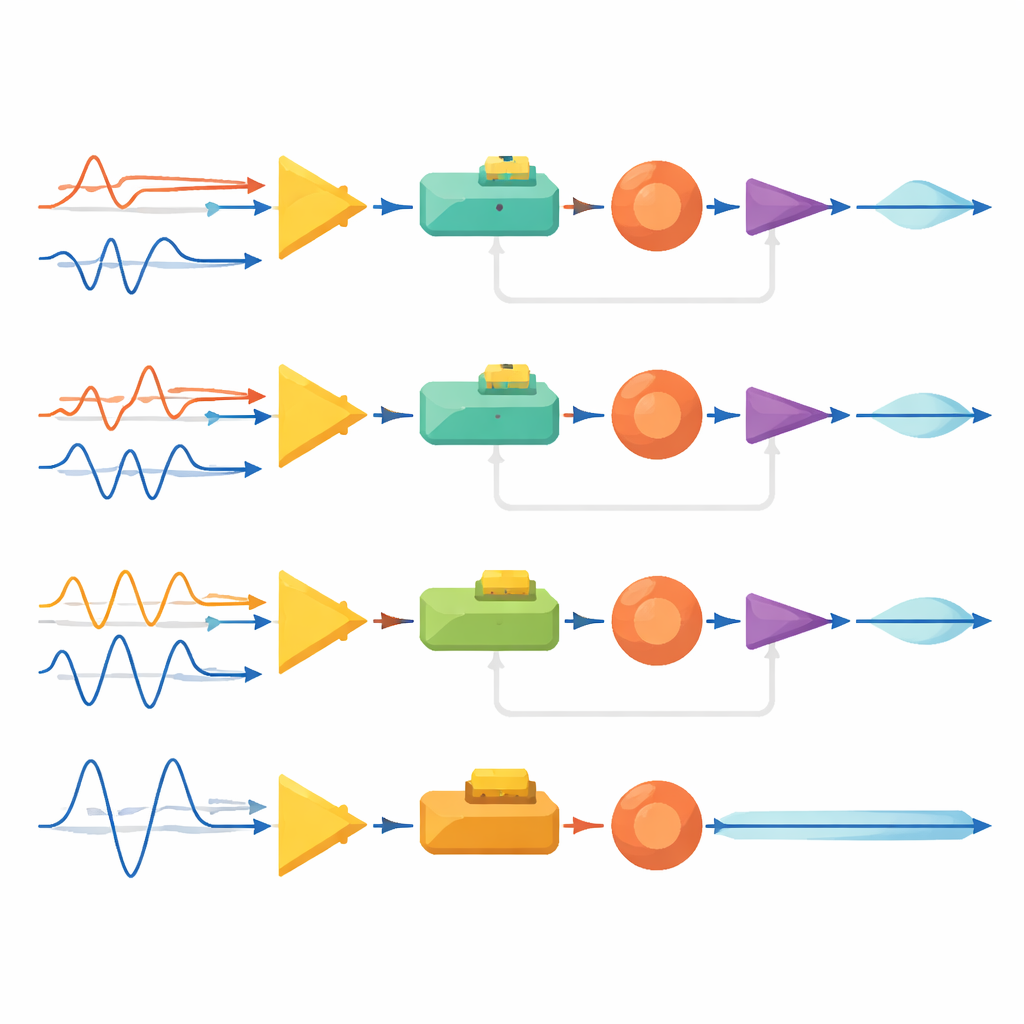
Auf Basis dieses Bauelements entwerfen die Forschenden eine analoge Version eines mehrstufigen Kalman-Filters, die direkt auf Sensorspannungen statt auf digitalen Zahlen arbeitet. Die Schaltung besteht aus drei hintereinandergeschalteten Stufen, die Position, Geschwindigkeit und Beschleunigung eines Fahrzeugs schätzen. Innerhalb jeder Stufe werden Grundoperationen wie Subtraktion, Integration, Addition und Differentiation von kompakten analogen Modulen ausgeführt. Der entscheidende „Gain“-Faktor, der dem Filter angibt, wie sehr neuen Sensormessungen im Vergleich zu eigenen Vorhersagen zu vertrauen ist, wird durch die Leitfähigkeit des Memtransistors realisiert. Durch einfaches Anpassen einer Gate-Spannung kann das System nahtlos einstellen, wie stark es auf LiDAR-, Radar- oder Bewegungssensoren hört, ohne Software neu schreiben zu müssen.
Fahrszenarien und schwierige Bedingungen
Um die Funktion in der Praxis zu demonstrieren, setzt das Team den vollständigen dreistufigen Filter auf einer Leiterplatte um, bestückt mit ihren MoS2-Bauelementen und konventionellen analogen Komponenten. Sie speisen realistische, verrauschte Signale ein, die dem entsprechen, was LiDAR-, Radar- und Bewegungssensoren bei einem Spurwechsel-Überholmanöver auf der Autobahn sehen würden. Während die Signale durch die einzelnen Stufen fließen, werden die Ausgaben sauberer und liefern konsistente Schätzungen von Position, Geschwindigkeit und Beschleunigung, wobei trotzdem scharfe Änderungen erhalten bleiben, die für die Sicherheit wichtig sind, etwa abruptes Bremsen. Das System ist besonders eindrucksvoll, wenn ein Sensor unzuverlässig wird oder verdeckt ist — etwa wenn ein Lkw ein anderes Fahrzeug vorübergehend vor LiDAR versteckt. Indem der mit dem beeinträchtigten Sensor verbundene Gain in der Hardware verringert wird, verlagert der analoge Filter seine Gewichtung automatisch auf die verbleibenden Eingänge und auf vorherige Bewegungsmuster und hält so Geschwindigkeits- und Beschleunigungsschätzungen glatt und physikalisch plausibel.
Schnellere, schlankere „Gehirne“ für Maschinen
Im Vergleich zu einer standardmäßigen digitalen Implementierung derselben Filteraufgabe verbraucht das analoge, memtransistorbasierte System etwa 13-mal weniger Energie und führt seine Berechnungen rund 59-mal schneller aus, während es gleichzeitig drei wichtige Bewegungsgrößen simultan verarbeitet. Da die Bauelemente kompakt, stabil und mit der großtechnischen Fertigung kompatibel sind, deutet dieser Ansatz auf künftige „In-Sensor“- oder „Near-Sensor“-Verarbeitungsblöcke hin, die nahe an Kameras und Radaren in Autos, Drohnen und anderen vernetzten Maschinen platziert werden können. Für Nicht-Spezialisten lässt sich mitnehmen, dass Ingenieure, indem sie die Physik fortgeschrittener Materialien einen Teil der Mathematik übernehmen lassen, intelligentere, schnellere und effizientere elektronische „Gehirne“ bauen können, die autonomen Systemen helfen, auch bei unvollständiger Sicht zuverlässig zu navigieren.
Zitation: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Schlüsselwörter: autonomes Fahren, Sensorfusion, Kalman-Filter, Memtransistor, analoge Verarbeitung