Clear Sky Science · de
TinyML-Pipeline für effiziente Rissklassifikation bei UAV-basierten Inspektionen der Bauwerkszustände
Intelligentere Augen am Himmel
Brücken, Staudämme und andere kritische Bauwerke altern ähnlich wie Menschen, und winzige Risse können frühe Warnsignale für künftige Ausfälle sein. Ingenieure schicken zunehmend kleine Drohnen, um diese Oberflächen zu fotografieren, doch viele dieser Bilder müssen heute noch an entfernte Server zur Analyse gesendet werden, was Akku verbraucht und Datenschutzrisiken mit sich bringt. Dieser Beitrag untersucht, wie man das rissdetektierende "Gehirn" auf einen winzigen, milliwatt-kompatiblen Chip schrumpfen kann, der direkt auf der Drohne sitzt — wodurch Inspektionen schneller, sicherer und deutlich effizienter werden.
Warum Risse wichtig sind
Traditionelle Methoden zur Überwachung des Bauwerkszustands beruhen oft auf Kontakt-Sensoren, die an Beton oder Stahl angeschraubt oder geklebt werden. Diese Systeme sind teuer in der Installation und erfassen Probleme häufig erst, nachdem Schäden fortgeschritten sind. Die visuelle Inspektion bietet eine direktere Sicht, aber Menschen auf Gerüsten oder in Fahrspuren zu schicken ist langsam, riskant und subjektiv. Kleine unbemannte Luftfahrzeuge (UAVs) mit Kameras versprechen eine bessere Lösung: Sie können schnell Brückendecks und Wände abfahren und Tausende detailreicher Fotos aufnehmen, die haardünne Risse zeigen. Die Herausforderung liegt darin, was mit all diesen Daten zu tun ist, wenn die Drohne nur begrenzte Batteriekapazität und oft unzuverlässige Netzwerkverbindungen hat.
Das Problem, alles in die Cloud zu senden
Die meisten aktuellen Systeme folgen dem Muster "Edge-Akquise–Cloud-Inferenz". Die Drohne fungiert im Wesentlichen als fliegende Kamera und streamt Bilder zu einem leistungsstarken Rechner an einem anderen Ort, der ein Deep-Learning-Modell ausführt, um zu entscheiden, ob ein Bildausschnitt einen Riss enthält. Aus Sicht der Rechenleistung ist das sinnvoll, bringt aber erhebliche Nachteile mit sich. Hochwertiges Bildstreaming leert den Drohnenakku und verkürzt die Flugzeit drastisch. Fällt die Funkverbindung aus oder wird schwächer, kann die Inspektion genau im falschen Moment ins Stocken geraten. Und das Übermitteln detaillierter Bilder kritischer Infrastruktur an entfernte Server wirft verständliche Datenschutz- und Sicherheitsfragen auf. Diese Spannungen motivieren einen anderen Ansatz: die Intelligenz direkt auf die Drohne zu bringen, auf Hardware, die kaum mehr leistet als eine Armbanduhr.
Das Gehirn so verkleinern, dass es auf einen winzigen Chip passt
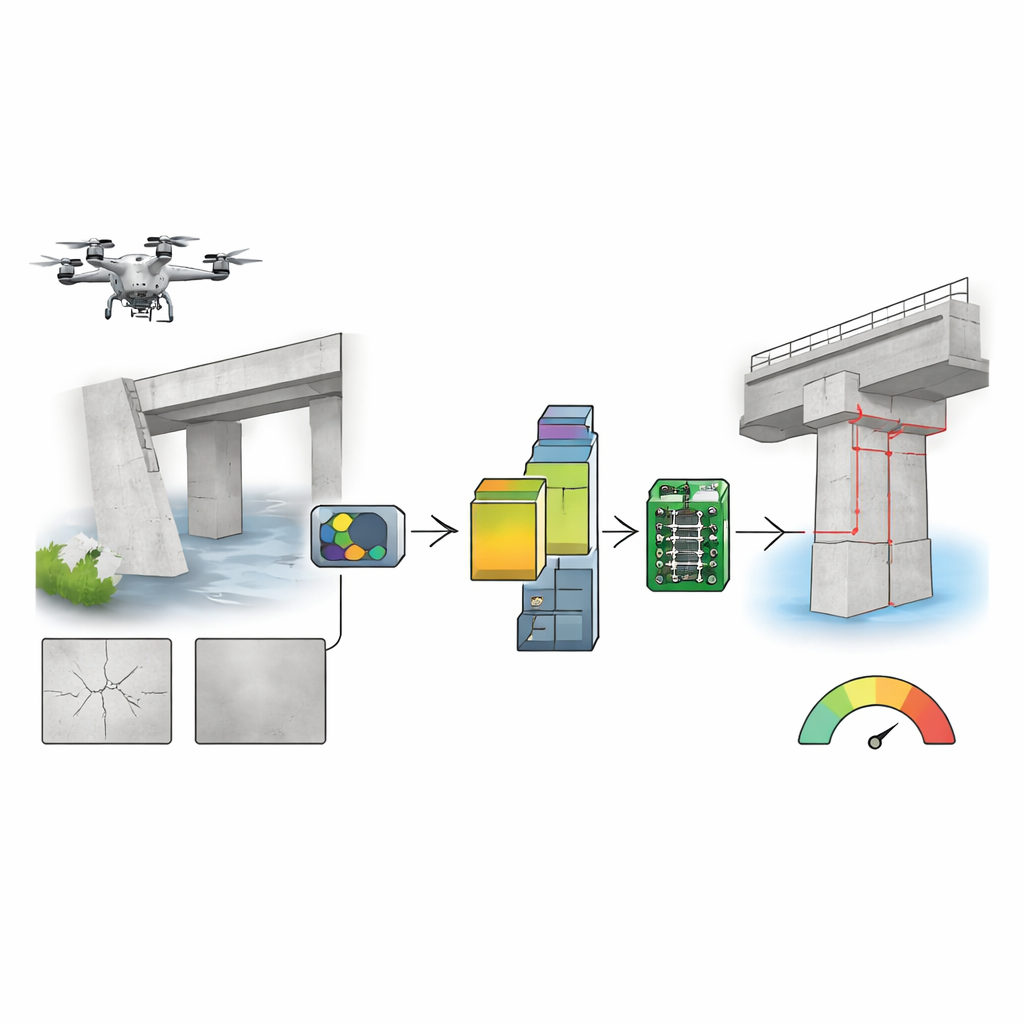
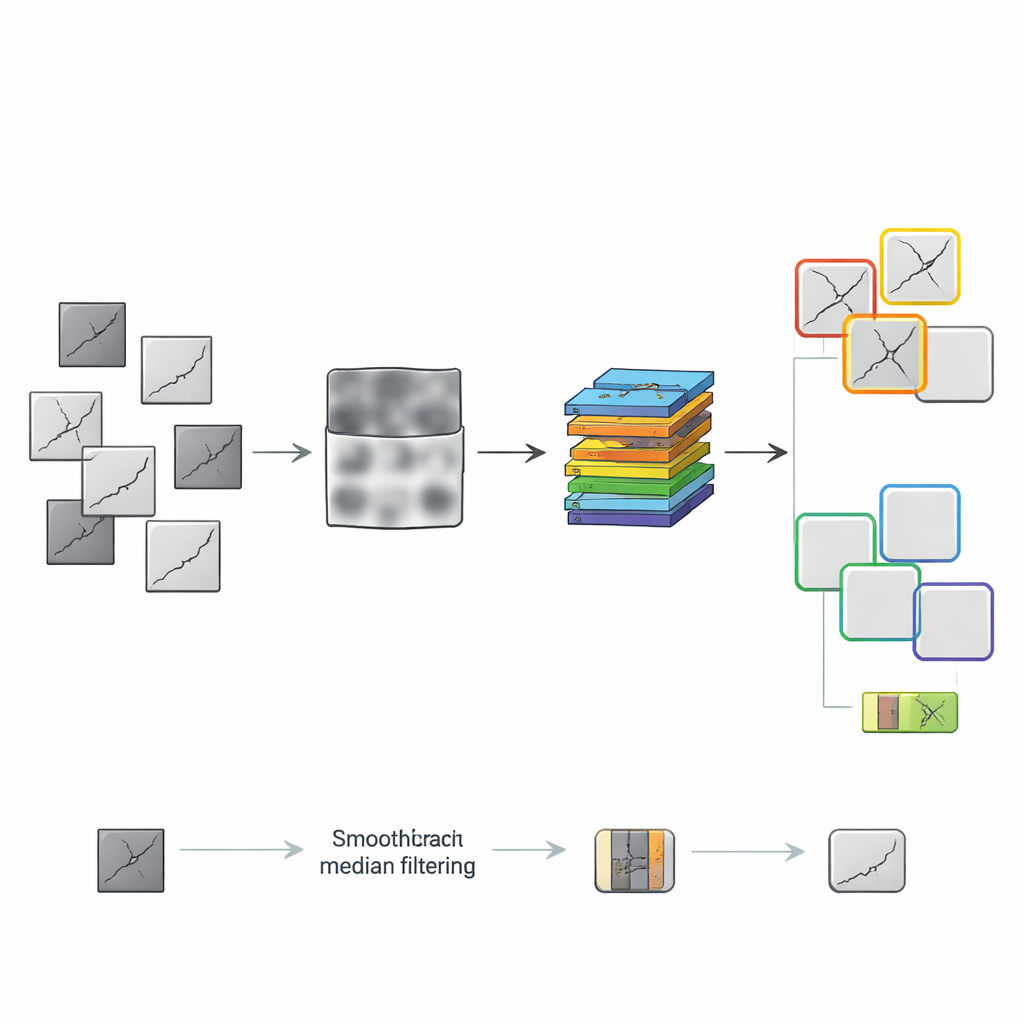
Die Autorinnen und Autoren entwickelten eine End-to-End-Pipeline, die auf einem stromsparenden Mikrocontroller, dem STM32H7, läuft und ein kompaktes neuronales Netz namens MobileNetV1x0.25 verwendet. Statt ein neues Modell zu erfinden, konzentrierten sie sich auf das Umfeld: wie die Bilder vorverarbeitet und wie das Modell komprimiert wird. Sie nutzten einen breit untersuchten Datensatz mit über 50.000 Betonbildern, aufgeteilt in kleine Ausschnitte, die als "Riss" oder "kein Riss" gekennzeichnet waren, und trainierten sowie testeten verschiedene Methoden zur Aufbereitung dieser Ausschnitte für das winzige Modell. Ein Weg folgte einer handgefertigten Abfolge von Schritten wie Graustufen-Konvertierung, Kontrastverstärkung, Rauschunterdrückung, Glättung und schließlich einer harten Binärisierung zu schwarz-weißen Silhouetten. Ein anderer Weg ließ eine "gierige" Suchstrategie schrittweise eine Vorverarbeitungskette aufbauen und behielt dabei stets die Kombination bei, die die Modellleistung tatsächlich verbesserte.
Das optimale Gleichgewicht in der Pipeline finden
Die Tests zeigten, dass mehr Verarbeitung nicht immer besser ist. Die manuelle Pipeline, die mit einer harten Binärisierung endete, schadete dem neuronalen Netz sogar, weil sie subtile Schattierungen entfernte, die das Modell zum Erkennen feiner Risse benötigte. Im Gegensatz dazu fand die gierige Suche heraus, dass ein einfacheres Paar von Schritten — Graustufen-Konvertierung gefolgt von Medianfilterung zur sanften Rauschglättung — die besten Ergebnisse lieferte. Darüber hinaus untersuchte das Team systematisch vier Wege zur Modellkomprimierung: Umwandlung der Zahlenwerte von voller Genauigkeit in acht-Bit-Ganzzahlen, Training unter quantisierungsnahen Bedingungen, Entfernen weniger wichtiger Gewichte (Pruning) und Clustern ähnlicher Gewichtswerte. Sie testeten diese Techniken einzeln und in Kombinationen, setzten die daraus resultierenden Modelle auf dem Mikrocontroller-Board ein und maßen nicht nur die Genauigkeit, sondern auch Speicherbedarf, Verarbeitungszeit und Energie pro Entscheidung.
Kleiner Rechner, große Leistung
Eine Konfiguration erwies sich als die beste Gesamtwahl: ein Graustufen- plus Medianfilter-Eingang, gespeist in ein Modell, das Pruning mit quantisierungsnahem Training in einem acht-Bit-Format kombiniert. Dieses kompakte Setup erreichte eine F1-Score — ein Maß, das Treffer bei echten Rissen gegen Fehlalarme abwägt — von 0,938, ein Anstieg um mehr als 11 Prozentpunkte gegenüber früheren On-Device-Risserkennungen. Gleichzeitig benötigte es nur etwa 2,9 Megabyte Arbeitsspeicher, 309 Kilobyte Programmspeicher und weniger als eine halbe Sekunde zur Verarbeitung jedes Bildausschnitts. Jede Entscheidung verbrauchte grob 0,6 Joule Energie. Auf einer DJI Mini 4 Pro montiert, würde der kontinuierliche Betrieb dieses Rissklassifikators die Flugzeit nur um etwa 4 Prozent reduzieren, verglichen mit etwa einem Viertel der Batterie, die von beliebten, wesentlich schwereren Edge-Computing-Boards verbraucht wird.
Was das für reale Inspektionen bedeutet
Für Nicht‑Spezialisten ist die zentrale Botschaft, dass ernsthafte strukturelle Bewertungen nicht mehr erfordern, sensible Bilder an entfernte Rechenzentren zu schicken oder sperrige, stromhungrige Computer in die Luft zu tragen. Durch sorgfältiges Abstimmen der Bildbereinigung und der Modellkomprimierung zeigen die Autorinnen und Autoren, dass ein daumengroßer Chip Risse im Beton zuverlässig erkennen kann, ohne die Drohnenbatterie nennenswert zu belasten. Das System bleibt relativ robust gegenüber Bewegungsunschärfe und wechselnden Lichtbedingungen und verhält sich sinnvoll, selbst wenn Rissbilder inmitten vieler gesunder Ausschnitte selten sind. Zusammen rücken diese Ergebnisse drohnenbasierte Inspektionen näher an eine Zukunft, in der Schwärme kleiner, kostengünstiger UAVs unsere Infrastruktur leise patrouillieren und frühe Warnungen mit intelligenter, effizienter Onboard-Verarbeitung liefern.
Zitation: Zhang, Y., Nürnberg, A., Rau, L.S.M. et al. TinyML pipeline for efficient crack classification in UAV-based structural health inspections. Sci Rep 16, 8964 (2026). https://doi.org/10.1038/s41598-026-43534-4
Schlüsselwörter: Drohneninspektion, Betonrisse, Tiny Machine Learning, Bauwerkszustandsüberwachung, Edge-AI