Clear Sky Science · de
Hardwareunabhängige Steuerung zur Simulation partieller Gravitation mit einem 2-DOF‑Robotergerät
Warum geringere Gravitation auf der Erde wichtig ist
Da Menschen längere Reisen zum Mond und Mars planen, müssen wir dringend wissen, wie ungewohnte Schwerkraftniveaus den Körper beeinflussen. Tests im Weltraum sind teuer und selten, daher nutzen Wissenschaftler auf der Erde spezielle Drehapparate, sogenannte Clinostaten, um für Zellen und kleine Gewebe niedrige Gravitation nachzuahmen. Diese Arbeit stellt eine neue Steuerungsweise für ein solches Gerät vor, sodass es zuverlässig nicht nur Schwerelosigkeit, sondern auch die schwächeren Anziehungskräfte von Mond, Mars und sogar Gravitationsstärken nahe der Erdschwere simulieren kann — ohne eng an einen bestimmten Motor oder eine bestimmte Hardware gebunden zu sein.
Mit Drehung zur simulierten Gravitation
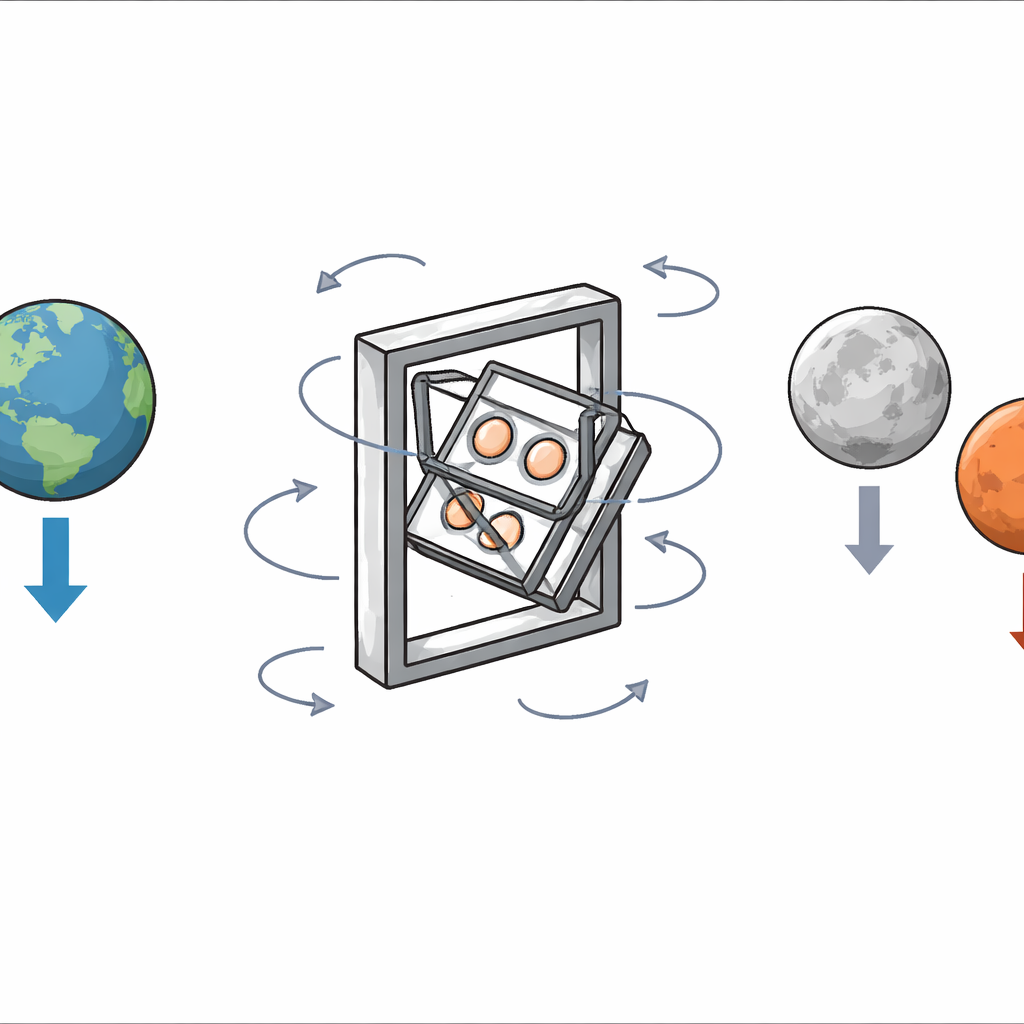
In der Nähe der Erdoberfläche zeigt die Gravitation nahezu überall annähernd nach unten. Ein dreidimensionaler Clinostat nimmt eine kleine Probe — etwa Zellen oder Organoide in einer Schale — und dreht sie langsam um zwei zueinander senkrechte Achsen. Weil sich die Orientierung der Probe ständig ändert, verschiebt sich auch die Richtung der „erlebten“ Gravitation für die Zellen, und über die Zeit mitteln sich diese Richtungen. Werden die Rotationen passend angeordnet, kann die zeitlich gemittelte Gravitation gegen Null gehen und so Mikrogravitation wie im Orbit nachbilden. Dieses einfache Prinzip wird seit vielen Jahren verwendet, um Muskelabbau, Knochenschwäche, Veränderungen des Immunsystems und andere weltraumähnliche Effekte zu untersuchen, ohne den Boden zu verlassen.
Von schwerelos zu „mondähnlicher“ Gravitation
In jüngerer Zeit erkannten Forschende, dass es nicht genügt, nur Schwerelosigkeit zu untersuchen. Astronauten auf Mond oder Mars leben mit einer schwächeren, nicht aber einer fehlenden Gravitation. Um diese Lücke zu schließen, wurde das Konzept der zeitlich gemittelten Simulation partieller Gravitation eingeführt: Anstatt die mittlere Anziehung verschwinden zu lassen, sorgt das Gerät dafür, dass die Gravitation etwas häufiger in eine bestimmte Richtung zeigt als in andere. Diese Schieflage erzeugt eine mittlere Anziehung zwischen Null und voller Erdgravitation, sodass Bedingungen wie 0,17 g (Mond) oder 0,38 g (Mars) nachgebildet werden können. Frühere Steuerungsverfahren konnten das ebenfalls erreichen, hingen aber stark von den verwendeten Motoren und Mechaniken ab und konnten keine partiellen Gravitationen über etwa 0,44 g erzeugen.
Neue Art, den Dreher zu steuern
Die zentrale Neuerung dieser Studie besteht darin, den äußeren Motor des Clinostaten auf Basis seines Winkels und nicht auf der Zeit zu steuern. Frühere Methoden gaben vor, wie schnell der Motor zu jedem Zeitpunkt drehen sollte, doch reale Hardware folgt diesem Plan nie perfekt: Kleine Verzögerungen und Motorgrenzen führen zu Winkelabweichungen, die sich aufschaukeln und Forscher zwingen, zusätzliche Rückkopplungsschleifen individuell auf jedes Gerät abzustimmen. Hier entwerfen die Autorinnen und Autoren die Steuerregel neu, sodass die Winkelgeschwindigkeit direkt als Funktion des aktuellen Winkels vorgegeben wird. Diese scheinbar kleine Änderung verringert das Fehlerwachstum erheblich und macht die Methode weitgehend unabhängig von Motorkraft und Trägheit. Gleichzeitig wird der Innenmotor mit einem randomisiert wirkenden Muster angesteuert, sodass die Gravitation nicht immer dieselbe Bahn beschreibt und die experimentelle Zuverlässigkeit steigt.
Die Gravitation näher an die Erde rücken
Mit Computersimulationen kartierte das Team, wie ein zentraler Steuerparameter, genannt α, die finale mittlere Gravitation beeinflusst. Durch Erhöhen von α konnten sie die simulierte partielle Gravitation bis auf etwa 0,68 g anheben — deutlich höher als das frühere Limit von 0,44 g. Um weiter zu kommen, führten sie einen „Ruhezeit“-Trick ein: Sobald der äußere Rahmen den Winkel erreicht, bei dem die Gravitation mit der gewünschten mittleren Anziehung übereinstimmt, stoppt der Motor kurz. Während dieser Pause erfährt die Probe einen konstanten Zug in dieser Richtung, wodurch die Schieflage verstärkt wird. Simulationen zeigten, dass längere Pausen die effektive Gravitation näher an 1 g heranführen, und Experimente bestätigten Werte bis etwa 0,81 g mit nur rund 1 % Abweichung von den vorhergesagten Ergebnissen im genauesten Bereich.
Testen von Mond, Mars und darüber hinaus
Die Forscher bauten einen zweiachsigen Clinostat, angetrieben von handelsüblichen Servomotoren, und überwachten die Gravitätsrichtung mit einem Inertialsensor, der im Zentrum befestigt war. Sie testeten ein Spektrum von α‑Werten und Ruhezeiten und maßen, wie schnell sich die mittlere Gravitation einpendelte und wie gut die Experimente mit den Simulationen übereinstimmten. Für moderate α‑Werte, die 0,33–0,63 g entsprechen, lag die Abweichung typischerweise bei etwa 1 % oder weniger. Simulationen und Experimente für mond- und marsähnliche Einstellungen ergaben mittlere Anziehungen nahe 0,17 g bzw. 0,38 g, während die Gravitätspfade von Durchlauf zu Durchlauf variierten. Die Autorinnen und Autoren untersuchten auch praktische Grenzen, die durch Motorauflösung und Reaktionsverzögerungen gesetzt werden, und geben einfache Richtlinien zur Wahl von Aktoren und Sicherheitsmargen, damit andere Labore präzise partielle Gravitätsniveaus reproduzieren können.
Was das für die künftige Raumfahrtgesundheit bedeutet
Einfach gesagt verwandelt diese Arbeit ein komplexes, hardwareempfindliches Drehsystem in einen weitgehend plug‑and‑play‑Simulator für partielle Gravitation. Indem die Motordrehzahl an den Winkel geknüpft und kontrollierte Pausen eingeführt werden, kann die Methode eine breite Palette von Gravitationsstärken glaubwürdig nachahmen — vom tiefen Weltraum über Mond und Mars bis nahe an die Erde — ohne ständiges manuelles Nachstimmen von Regelkreisen. Diese Flexibilität erleichtert es vielen Forschungsgruppen, zu untersuchen, wie Zellen, Gewebe und Organoide auf bestimmte Gravitätsniveaus reagieren, und hilft so, Gesundheitsrisiken vorauszusehen und Gegenmaßnahmen für langfristige Raumfahrtmissionen zu entwickeln.
Zitation: Kim, Y.J., Park, S. & Kim, S. Hardware-independent control for partial gravity simulation using a 2-DOF robotic device. Sci Rep 16, 9727 (2026). https://doi.org/10.1038/s41598-026-40665-6
Schlüsselwörter: Simulation partieller Gravitation, Clinostat, Weltraumbiologie, Forschung zur Mikrogravitation, robotische Bewegungssteuerung