Clear Sky Science · de
Objektbewusste semantische Kartierung mit Dichtheitsfunktionen für Indoor-Re-Lokalisierung und Pfadplanung
Warum intelligentere Innenraumkarten wichtig sind
Wenn Heim- und Serviceroboter aus den Laboren in echte Wohnungen ziehen, müssen sie mehr können als nur Wände und Möbeln auszuweichen. Damit ein Roboter wirklich nützlich ist, sollte er verstehen, dass ein Bett meist auf ein Schlafzimmer hindeutet oder ein Kühlschrank auf eine Küche. Dieses Papier stellt eine neue Methode vor, mit der Roboter Innenräume „durch die Objekte, die einen Raum definieren“, sehen können, sodass sie besser feststellen, wo sie sich befinden und Wege wählen, die der Nutzung durch Menschen näherkommen.
Räume durch ihre Alltagsgegenstände sehen
Traditionelle Roboterkarten konzentrieren sich entweder auf rohe Geometrie oder auf abstrakte Symbole. Gitterkarten, erzeugt aus Laserscans, erfassen detaillierte Formen, werden aber groß im Speicher und langsam bei der Suche und treiben Roboter zu steifen, gitterähnlichen Bahnen. Hochrangige Graphen von Räumen und Türen sind einfacher zu handhaben, werfen aber die feinen Details weg, die für präzises Fahren nötig sind. Die Autoren überbrücken diese Lücke, indem sie Karten um Räume und die wichtigsten statischen Objekte in ihnen organisieren – Betten, Sofas, Kühlschränke, Tische und dergleichen. Jeder Raum wird auf einem flachen Grundriss umgrenzt, und jede wichtige Objektklasse erhält ihre eigene Ebene, sodass sich verschiedene Möbelarten nicht gegenseitig überschreiben.
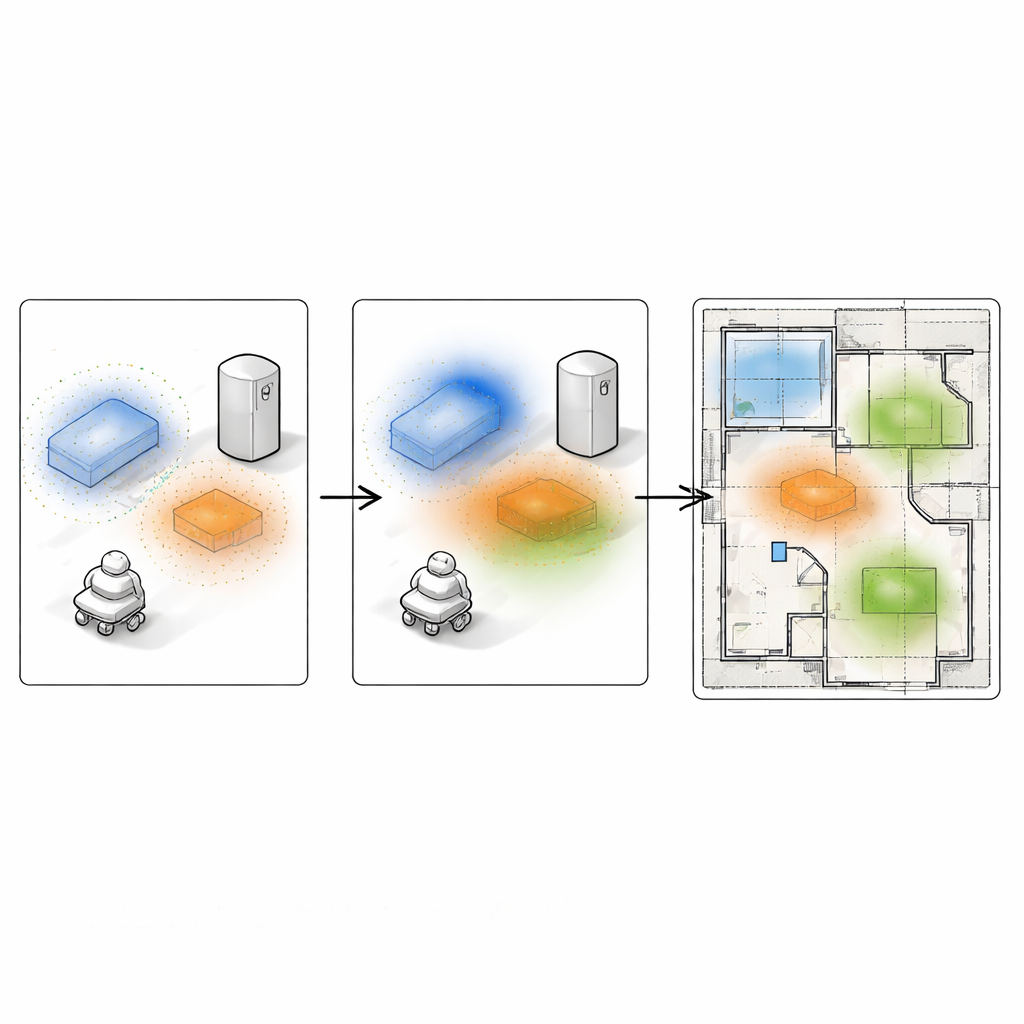
Möbel in weiche Wahrscheinlichkeitswolken verwandeln
Anstatt jedes Objekt als scharfkantige Box darzustellen, wandelt die Methode 3D-Scans von Möbeln in glatte „Wärmekarten“ auf dem Boden um. Der Roboter rekonstruiert zunächst jeden Raum in 3D mit einer RGB‑D-Kamera und Standardwerkzeugen und semantisiert dann Punkte, die zu Objekten wie Wänden, Betten oder Stühlen gehören. Für jeden Objekttyp im Raum werden Punktcluster gefunden und auf den Boden projiziert. Aus diesen Clustern schätzt das System eine kontinuierliche Wahrscheinlichkeitsdichte – eine weiche Wolke, die dort am höchsten ist, wo das Objekt am wahrscheinlichsten ist, und nach außen sanft ausklingt. Das Stapeln dieser Wolken pro Objekttyp ergibt eine kompakte, geschichtete Karte, die sowohl die Bedeutung der Objekte als auch ihre ungefähre Form bewahrt und gleichzeitig natürlich mit Rauschen und Teilansichten umgeht.
Roboter beim Wiederfinden ihres Standorts helfen
Eine wichtige Anwendung dieser objektzentrierten Karte ist es, einem Roboter zu helfen, sich wieder zu lokalisieren, wenn er keine Ahnung hat, wo er sich auf dem Grundriss befindet – ein häufiges Problem, wenn der Roboter gerade erwacht oder verschoben wurde. Der Roboter macht einen neuen Blick mit seiner Tiefenkamera, erkennt sichtbare Objekte und baut für diese Teilansicht eigene kleine Wahrscheinlichkeitswolken. Dann durchsucht ein evolutionsbasierter Suchalgorithmus viele mögliche Roboterpositionen in der Gebäudekarte. Für jede Kandidatenpose werden die lokalen Wolken auf die globale Karte gelegt und ihre Ähnlichkeit mit einer statistischen Distanz gemessen. Raumgrenzen und Sichtprüfung verwerfen unmögliche Posen, etwa wenn ein Kühlschrank durch eine Wand sichtbar wäre. Über viele Generationen entwickelt sich die Population der Kandidatenposen in Richtung der Position, an der die beobachteten Objekte am besten mit den gespeicherten Wahrscheinlichkeitsfeldern übereinstimmen, was eine robuste Schätzung von Position und Orientierung des Roboters ergibt.
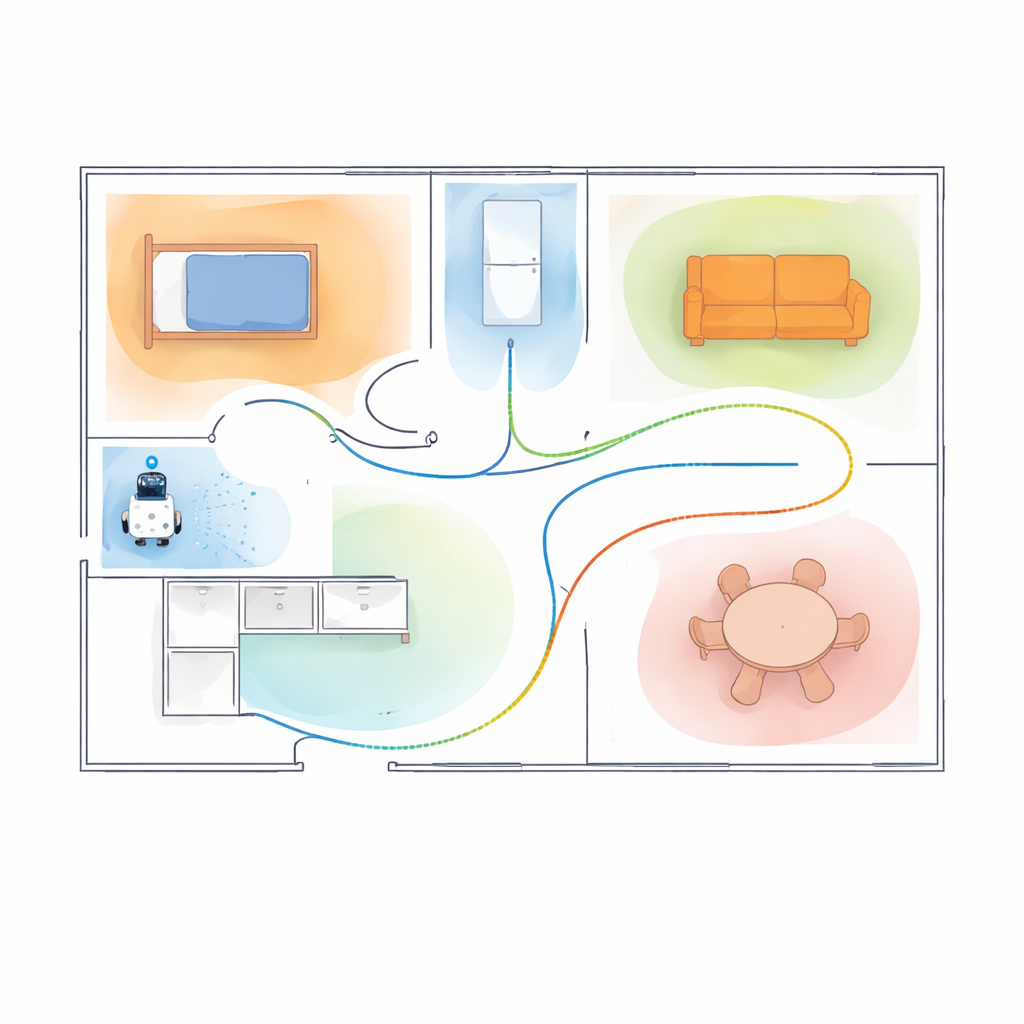
Wege planen, die der menschlichen Raumnutzung Rechnung tragen
Die gleiche Karte lenkt auch die Bewegung des Roboters. Da jeder Objekttyp als glattes Einflussfeld repräsentiert ist, kann der Roboter angewiesen werden, bestimmte Bereiche zu bevorzugen oder zu meiden, indem numerische Gewichte angepasst werden. Betten können nachts zu Bereichen werden, die man meiden sollte, während Tische als Anziehungspunkte fungieren können, wenn man nach Gegenständen sucht. Diese semantischen Präferenzen werden mit einer Standard-Hinderniskarte und einem Sicherheitsabstand zu Wänden kombiniert, um eine einzige Kostenlandschaft über dem Grundriss zu bilden. Ein klassischer Pfadplaner findet dann Routen, die nicht nur kollisionsfrei sind, sondern auch die gewünschten sozialen oder aufgabenbezogenen Vorlieben berücksichtigen. Experimente mit einem realistischen Datensatz und einer real möblierten Wohnung zeigen, dass diese semantisch gewichteten Pfade die beabsichtigten Präferenzen besser einhalten, mitunter auf Kosten kleinerer Längensteigerungen, und in echten Wohnungen glatter sein können.
Was das für Alltagsroboter bedeutet
Vereinfacht gesagt lehrt diese Arbeit Roboter, Wohnungen so zu betrachten, wie Menschen es tun: als Räume, die durch ihre Möbel definiert sind, nicht nur als leere Kisten mit Wänden. Indem jedes Schlüsselobjekt in eine weiche Wahrscheinlichkeitswolke gehüllt wird, kann eine einzelne kompakte Karte sowohl "Wo bin ich?" als auch "Wie komme ich dorthin?" unterstützen, ohne separate, aufgabenspezifische Modelle zu benötigen. Tests zeigen, dass dieser Ansatz Robotern hilft, sich in überfüllten oder einander ähnlichen Räumen zuverlässiger zu lokalisieren und Routen zu wählen, die eher den menschlichen Erwartungen entsprechen. Mit Reifung dieser Ideen könnten zukünftige Heimroboter höflicher und intelligenter navigieren und sich in unseren Räumen mit einer Wahrnehmung bewegen, die weit weniger mechanisch wirkt.
Zitation: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Schlüsselwörter: lokalisierung von innenraumrobotern, semantische Kartierung, objektbewusste Navigation, probabilistische Roboterkarten, Pfadplanung