Clear Sky Science · de
InFoRM: ein einheitliches inverses und vorwärtsgerichtetes Modell für sensomotorische Kontrolle
Wie das Gehirn Bewegung vereinfachen könnte
Jedes Mal, wenn Sie nach einer Tasse greifen oder eine Tastatur antippen, muss Ihr Gehirn eine Absicht ("Bewege meine Hand dorthin") in präzise Muskelaktivität umsetzen und gleichzeitig vorhersagen, wie sich diese Bewegung anfühlen wird. Klassische Theorien nehmen an, dass das Gehirn dafür zwei getrennte interne Rechner verwendet: einen, der die Kommandos an die Muskeln erzeugt, und einen anderen, der die eintreffenden Sinnesdaten vorhersagt. Diese Studie untersucht eine gewagte Alternative: dass ein einziger, einheitlicher Schaltkreis beide Seiten der Aufgabe übernehmen könnte — was Energie spart und die Leistung verbessert.
Zwei Blickwinkel auf Kontrolle
Traditionelle Modelle der Bewegungssteuerung stellen sich ein geteiltes System vor. Ein „inverser“ Teil wandelt ein gewünschtes Ergebnis (zum Beispiel den Weg der Fingerspitze im Raum) in die nötigen Muskelaktivierungen um, während ein „vorwärtsgerichteter“ Teil vorhersagt, wie sich der Körper bewegt und welches sensorische Feedback folgt. Diese beiden Teile werden in Lehrbüchern oft als getrennte Kästchen dargestellt. Bildgebende Daten und Läsionsstudien stützen jedoch keine so saubere Trennung, und manche Gehirnregionen scheinen an beiden Rollen beteiligt zu sein. Zudem kann der Betrieb zweier komplexer Schaltkreise metabolisch teuer sein. Die Autoren fragen daher, ob ein flexibles Netzwerk lernen könnte, Motorbefehle zu erzeugen, sensorisches Feedback vorherzusagen und sogar das ursprüngliche Ziel allein aus den internen Signalen zu erschließen.
Ein Netzwerk, das alles kann
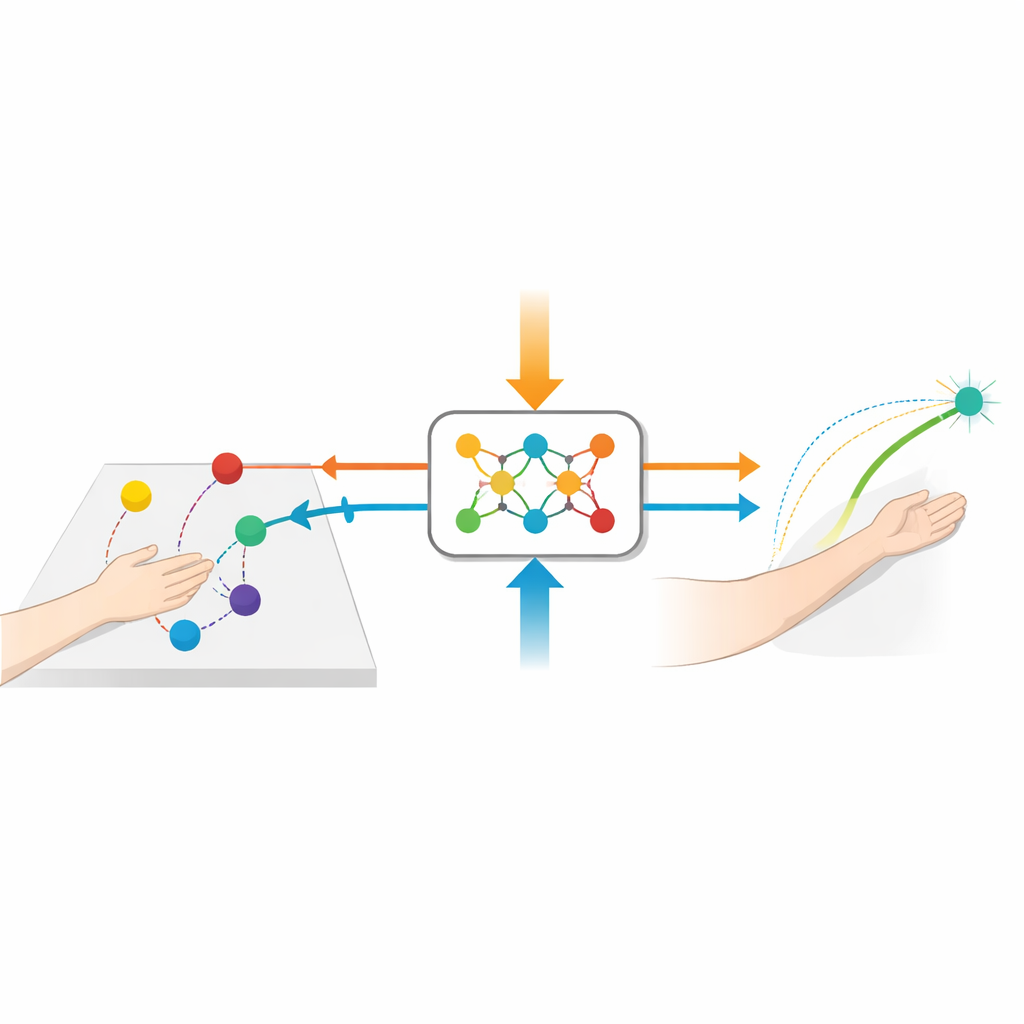
Um diese Idee zu prüfen, bauten die Forschenden ein rechnerisches Modell namens InFoRM (Kurzform für inverse–forward–recognition model). Statt zwei gestapelter Module nutzt InFoRM ein einziges rekurrentes neuronales Netzwerk — ein Geflecht miteinander verbundener Einheiten — in das Ziel-, Muskel- und Sensorsignale alle einfließen. Aus diesem gemeinsamen „Reservoir“ an Aktivität werden drei Readouts parallel trainiert: einer rekonstruiert die gewünschte Handbahn, einer erzeugt die Muskelaktivierungen, die dafür nötig sind, und einer sagt die sensorischen Signale (Muskel-Länge und -Geschwindigkeit) voraus, die folgen würden. Entscheidend ist, dass dieselben internen Dynamiken alle drei Aufgaben zugleich unterstützen, sodass das Modell Informationen zwischen ihnen teilen kann, anstatt jede isoliert zu erlernen.
Das Modell im Realwelttest
Das Team zeichnete reale Armbewegungen von Freiwilligen auf, die rhythmisch von einem zentralen Punkt zu Zielen auf einem Tisch in verschiedenen Richtungen und Entfernungen griffen. Motion-Capture-Daten und ein detailliertes muskuloskelettales Modell lieferten für jede Bewegung den Fingerspitzenpfad, die geschätzten Muskelaktivierungen und die entsprechenden sensorähnlichen Signale der Muskeln. InFoRM wurde an einer Teilmenge der Richtungen trainiert und dann in mehreren anspruchsvollen Szenarien getestet: dem Wiederholen gelernter Bewegungen, dem Erzeugen von Bewegungen in neuen Zwischenrichtungen ("Morphing" zwischen Gesehenem) und dem Umgang mit natürlichen, selbstgewählten Übergängen zwischen Zielen. Zum Vergleich bauten die Autorinnen und Autoren außerdem klassischere Steuerungsarchitekturen mit getrennten inversen und vorwärtsgerichteten Netzwerken sowie erweiterte Varianten, denen zusätzliche Eingabeinformationen gegeben wurden.

Scharfere Vorhersagen mit weniger Ressourcen
In allen Tests reproduzierte das einheitliche InFoRM-Netzwerk die aufgezeichneten Bewegungen und Muskelsignale genauer als jede der getrennten Architekturen. Seine Ausgaben folgten den echten Signalen enger und mit kleineren Fehlern, selbst wenn es gebeten wurde, zu nicht trainierten Richtungen zu interpolieren oder realistische, unvorhergesehene Zielsequenzen zu bewältigen. Wichtig ist, dass InFoRM diese höhere Genauigkeit bei vergleichbarer oder geringerer Neuronzahl und mit deutlich weniger Trainingsiterationen erreichte, was auf eine bessere rechnerische Effizienz hindeutet. Dass es auch das beste erweiterte Kontrollmodell übertraf — eines, das Zugriff auf dieselbe Kombination aus Ziel-, Motor- und Sensorinformationen hatte — legt nahe, dass der Vorteil daraus resultiert, alles in einem rekurrenten Schaltkreis zu integrieren und nicht nur aus reichhaltigeren Eingaben.
Was das für das Verständnis des Gehirns bedeutet
Die Ergebnisse stützen die Idee, dass das Gehirn möglicherweise keine scharf getrennten „vorwärtsgerichteten“ und „inversen“ Motoren für Bewegung unterhält. Stattdessen könnte ein einziger, reich vernetzter Schaltkreis verdeckt beides enthalten, wobei Motorbefehle und Vorhersagen aus denselben zugrundeliegenden Dynamiken hervorgehen. Diese Perspektive fügt sich gut in moderne Sichtweisen des Gehirns als prädiktive Maschine ein, die ständig Erwartungen über ihren eigenen Körper und die Welt erzeugt und aktualisiert. Zwar bleibt das Modell eine vereinfachte Abstraktion und biologische Details wie Nervenverzögerungen und sich verändernde Synapsen sind noch zu untersuchen, doch zeigt InFoRM, dass ein einheitliches Design sowohl leistungsfähig als auch ökonomisch sein kann und eine überzeugende alternative Blaupause dafür bietet, wie unser Nervensystem Bewegung steuern könnte.
Zitation: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Schlüsselwörter: sensomotorische Kontrolle, interne Modelle, neuronale Netze, motorisches Lernen, prädiktive Verarbeitung