Clear Sky Science · de
ACFM: adaptiver kanalgewichteter Fusionsalgorithmus zur Verbesserung der Erkennung kleiner Objekte im UAV-Verkehr
Mehr vom Himmel sehen
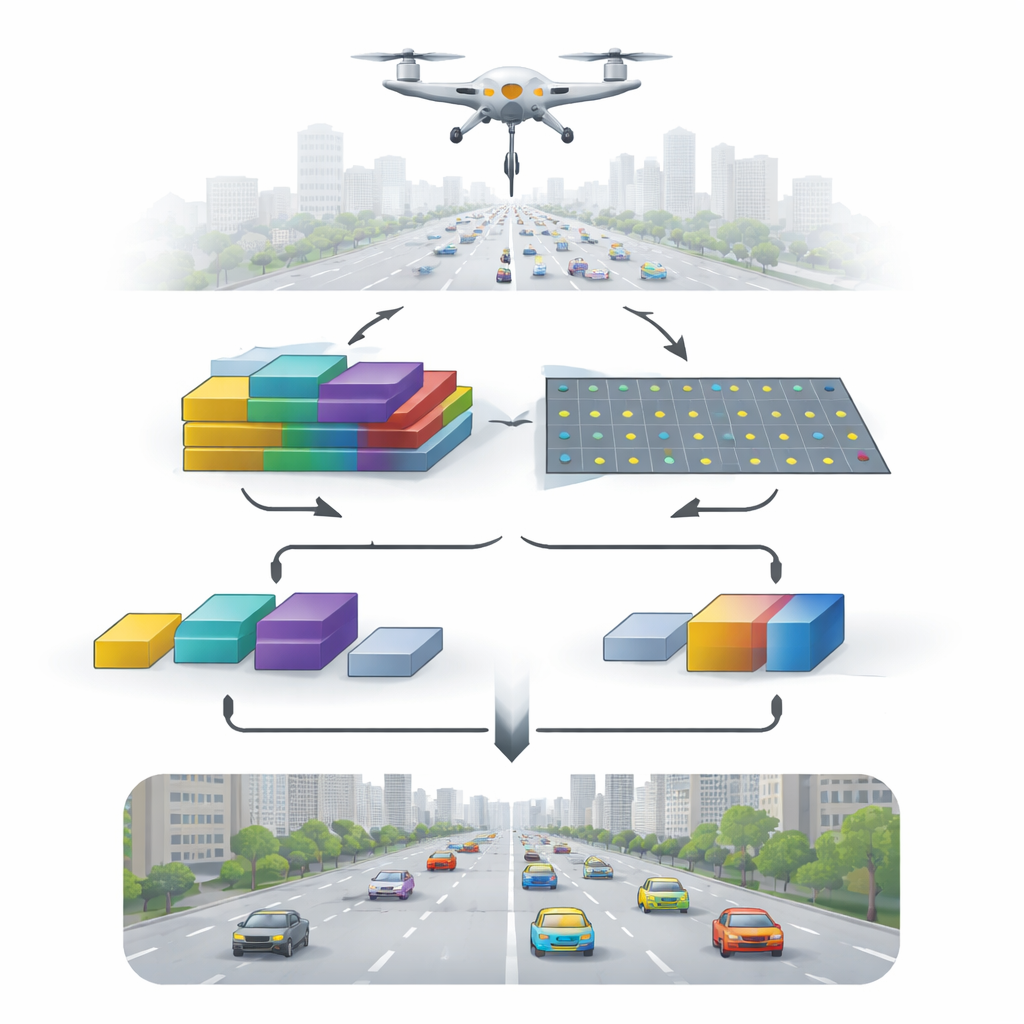
Da Drohnen zunehmend den Verkehr, die Sicherheit von Menschenmengen und Katastrophengebiete überwachen, stoßen sie auf ein simples, aber hartnäckiges Problem: aus großer Höhe nehmen die für uns wichtigen Objekte — Autos, Busse, sogar Menschen — oft nur wenige Pixel ein. Diese winzigen Punkte übersehen Algorithmen leicht, besonders in belebten Straßen mit Schatten, Schildern und Bewegungsunschärfe. Dieser Beitrag stellt einen neuen Ansatz vor, der Computern hilft, solche kleinen Objekte in Drohnenaufnahmen klarer „zu sehen“, ohne die Erkennung erheblich zu verlangsamen.
Warum winzige Punkte zählen
Drohnenkameras erfassen weite Szenen aus großer Höhe, sodass ein einzelnes Bild Autobahnen, Gebäude, Bäume und Dutzende Fahrzeuge enthalten kann. Die meisten dieser Fahrzeuge erscheinen sehr klein und können sich überlappen oder hintereinander verborgen sein. Traditionelle Deep-Learning-Detektoren sind hervorragend darin, große, klare Objekte zu finden, verlieren aber oft feine Details, während Informationen durch tiefere Schichten des Netzes fließen. Das Ergebnis ist, dass kleine Fahrzeuge im Hintergrund verschwimmen — insbesondere an belebten Kreuzungen, bei schlechter Beleuchtung oder leicht verschwommenem Filmmaterial. Bestehende Mehrskalenmethoden helfen zwar teilweise, indem sie Informationen aus verschiedenen Netzwerkschichten kombinieren, doch sie stützen sich meist auf feste, voreingestellte Regeln und tun sich schwer, sich anzupassen, wenn die Szene besonders überladen oder komplex wird.
Ein klügerer Weg, Hinweise zu verschmelzen
Die Autoren schlagen ein adaptives kanalgewichtetes Fusionsmodul vor, kurz ACFM, das in bestehende Objektdetektoren eingesteckt werden kann, um deren Fähigkeit zu verbessern, kleine Ziele in Drohnenverkehrsszenen zu erkennen. Anstatt alle visuellen Informationen gleich zu behandeln, betreibt ACFM zwei spezialisierte Zweige parallel und fusioniert ihre Ausgaben szenenabhängig. Ein Zweig verfeinert die Behandlung von Merkmalen über Skalen hinweg, sodass feine räumliche Details erhalten bleiben. Der andere Zweig wirkt wie ein Scheinwerfer: Er verstärkt wirklich wichtige Kleinstobjekt-Hinweise und unterdrückt ablenkende Hintergrundmuster. Entscheidend ist, dass die Fusion zwischen diesen Zweigen nicht festgelegt ist. ACFM passt an, wie sehr jedem Zweig vertraut wird, je nach dem aktuellen Bild, sodass das System in einer ruhigen Autobahnszene anders reagiert als an einer dichten Kreuzung.
Details über Skalen hinweg bewahren
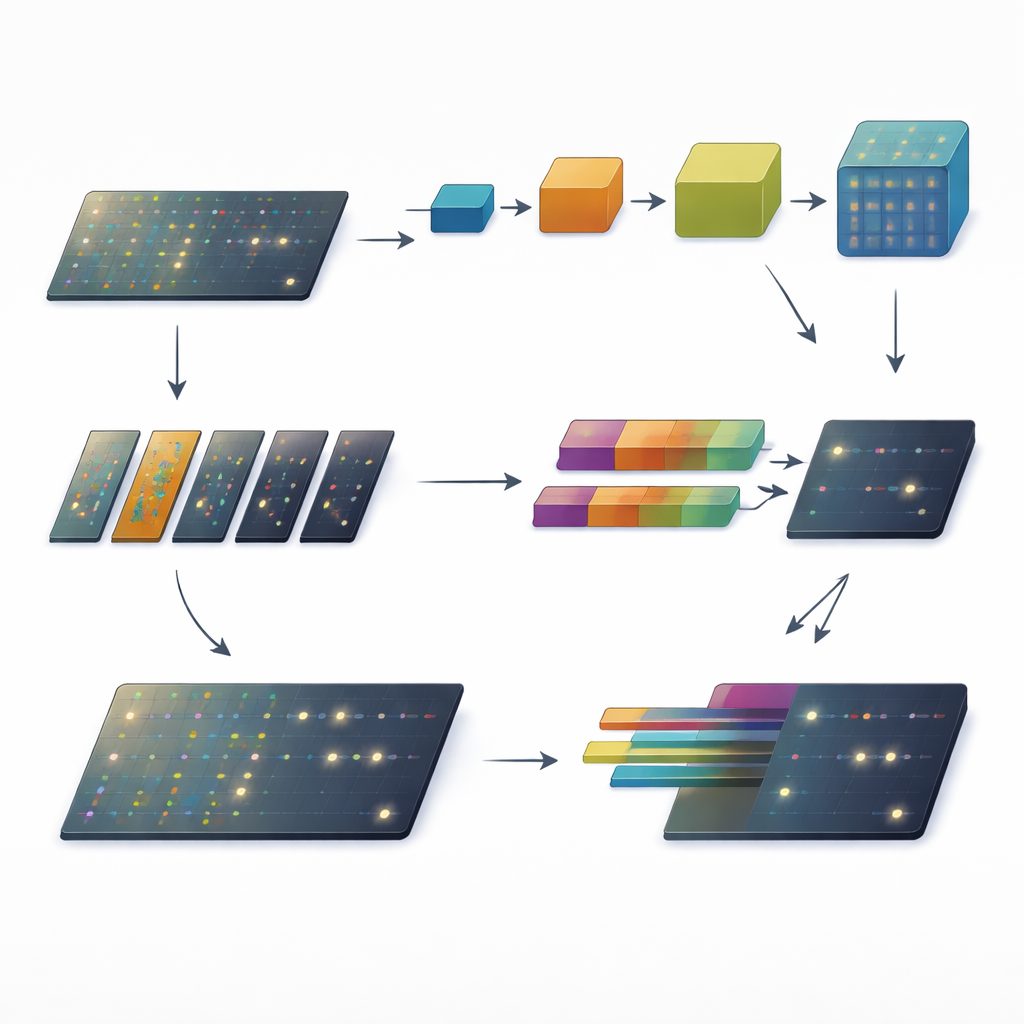
Im ersten Zweig, dem sogenannten Mehrskalen-Verfeinerungsblock, leitet das Netzwerk Merkmale durch ein Paar von Pfaden. Ein Pfad erhält die ursprünglichen Informationen unverändert, sodass feinere, hochauflösende Details erhalten bleiben. Der andere Pfad komprimiert und erweitert die Repräsentation, um dem Modell zu helfen, den größeren Kontext zu erfassen, in dem sich kleine Fahrzeuge innerhalb der Szene befinden. Am Ende werden diese Pfade zusammengeführt, sodass jedes Ausgabepixel sowohl von scharfen lokalen Details als auch von einem Verständnis der Umgebung profitiert. Das erleichtert es dem Detektor, engere, konsistentere Begrenzungsrahmen um kleine Autos und Busse unterschiedlicher Größe zu ziehen, selbst wenn der Hintergrund unruhig oder teilweise verdeckt ist.
Hintergrundrauschen dämpfen
Der zweite Zweig konzentriert sich auf Aufmerksamkeit. Er teilt die Feature-Kanäle in Gruppen auf und lernt für jede Gruppe eine dünn besetzte „Maske“, die nur die vielversprechendsten Regionen hervorhebt. Bereiche, die wie Hintergrund aussehen — Straßenoberflächen, Gebäudedächer, Baumkronen — werden heruntergefahren, während winzige, aber aussagekräftige Signale, etwa Spiegelungen und Kanten von Fahrzeugen, verstärkt werden. Indem diese geschärften Details kontrolliert wieder mit den ursprünglichen Merkmalen kombiniert werden, liefert dieser gruppierte spärliche Aufmerksamkeitszweig eine sauberere, discriminativere Sicht auf die Szene. Dadurch ist es weniger wahrscheinlich, dass der Detektor Muster im Asphalt oder von Gebäuden geworfene Schatten mit tatsächlichen Fahrzeugen verwechselt.
Die Szene die Mischung wählen lassen
Das letzte Element von ACFM ist ein kanalweiser adaptiver Gewichtungsmechanismus, der für jeden Kanal entscheidet, wie stark auf welchen Zweig zu vertrauen ist. Zuerst fasst er zusammen, was im gesamten Bild passiert, und verwendet dann eine leichtgewichtige Operation, um eine Menge von Gewichten zwischen Null und Eins zu schätzen. Ist die Szene einfach und die Objekte gut getrennt, kann das Netzwerk stärker auf die Mehrskalen-Verfeinerung setzen. Ist die Szene dicht, unübersichtlich oder verrauscht, kann es mehr Gewicht auf den Aufmerksamkeitszweig legen, der Hintergrundstörungen unterdrückt. Dieses dynamische Ausbalancieren ersetzt starre, handgefertigte Fusionsregeln durch eine automatische, datengetriebene Strategie und ermöglicht es dem Detektor, flexibel auf wechselnde Bedingungen von Frame zu Frame zu reagieren.
Scharfere Augen für Drohnenverkehr
Wird ACFM in einen verbreiteten Detektor namens GFL integriert und auf drei öffentlichen Drohnen-Verkehrsdatasets getestet, verbessert es durchgehend die Erkennungswerte, insbesondere bei herausfordernden Datensätzen mit vielen kleinen, überlappenden Fahrzeugen. Die Genauigkeitsgewinne gingen mit nur geringen zusätzlichen Rechenkosten einher, sodass das verbesserte System weiterhin nahe an Echtzeit arbeiten kann — eine wichtige Voraussetzung für praktische Verkehrsüberwachung. Für Nicht-Spezialisten ist die Kernaussage klar: Indem Details bewahrt, Rauschen unterdrückt und die Kombination von Merkmalen szenenabhängig angepasst wird, hilft ACFM Drohnen, mehr wie aufmerksame menschliche Beobachter und weniger wie starre Mustervergleichssysteme zu agieren und bietet eine zuverlässigere Grundlage für künftige Smart-City- und Luftüberwachungsanwendungen.
Zitation: Liu, S., Zhu, H., Yuan, Z. et al. ACFM: adaptive channel weighted fusion algorithm for improving small object detection performance in UAV traffic. Sci Rep 16, 8366 (2026). https://doi.org/10.1038/s41598-026-39789-6
Schlüsselwörter: Drohnen-Verkehrsüberwachung, Erkennung kleiner Objekte, Computer Vision, Aufmerksamkeitsmechanismen, Mehrskalige Merkmalsfusion