Clear Sky Science · de
Effiziente Ladeplanung durch Koordination von Elektrofahrzeug‑Platoons und Ladestationen
Warum intelligenteres Laden für Alltagsfahrende wichtig ist
Mit der zunehmenden Verbreitung von Elektrofahrzeugen wird schnelles und bequemes Laden bald ebenso wichtig sein wie das Auffinden einer Tankstelle heute. Diese Studie untersucht, was passiert, wenn nicht nur einzelne Elektroautos, sondern auch dicht aufeinander fahrende Gruppen—sogenannte Platoons—die gleichen Straßenladepunkte nutzen. Durch die Koordination von Fahrbewegungen und Ladehalt zeigen die Autorinnen und Autoren, dass sich Leerlaufzeiten verringern, lange Warteschlangen an stark frequentierten Stationen vermeiden lassen und die bestehende Ladeinfrastruktur besser genutzt werden kann.
Gemischter Verkehr auf den Straßen von morgen
Die Arbeit entwirft ein nahe‑gelegenes Zukunftsszenario, in dem zwei Arten von elektrisch betriebenem Verkehr nebeneinander existieren. Die eine besteht aus normalen, von Menschen gesteuerten Autos, deren Besitzer selbst entscheiden, wann und wo sie laden. Die andere besteht aus organisierten Konvois automatisierter Fahrzeuge—Lieferwagen, Robotaxis oder Firmenflotten—die als Platoons mit abgestimmten Geschwindigkeiten unterwegs sind. Diese Platoons sparen Energie und erhöhen die Straßenkapazität, können beim Einfahren in eine Station jedoch mehrere Ladepunkte gleichzeitig belegen und so die lokale Kapazität schnell überfordern. Traditionelle Planungsmethoden behandeln jedes Fahrzeug als separaten, unabhängigen Kunden und berücksichtigen dieses Zusammenballen nur selten, wodurch ein reibungsloses Netz in ein System mit Engpässen verwandelt werden kann.
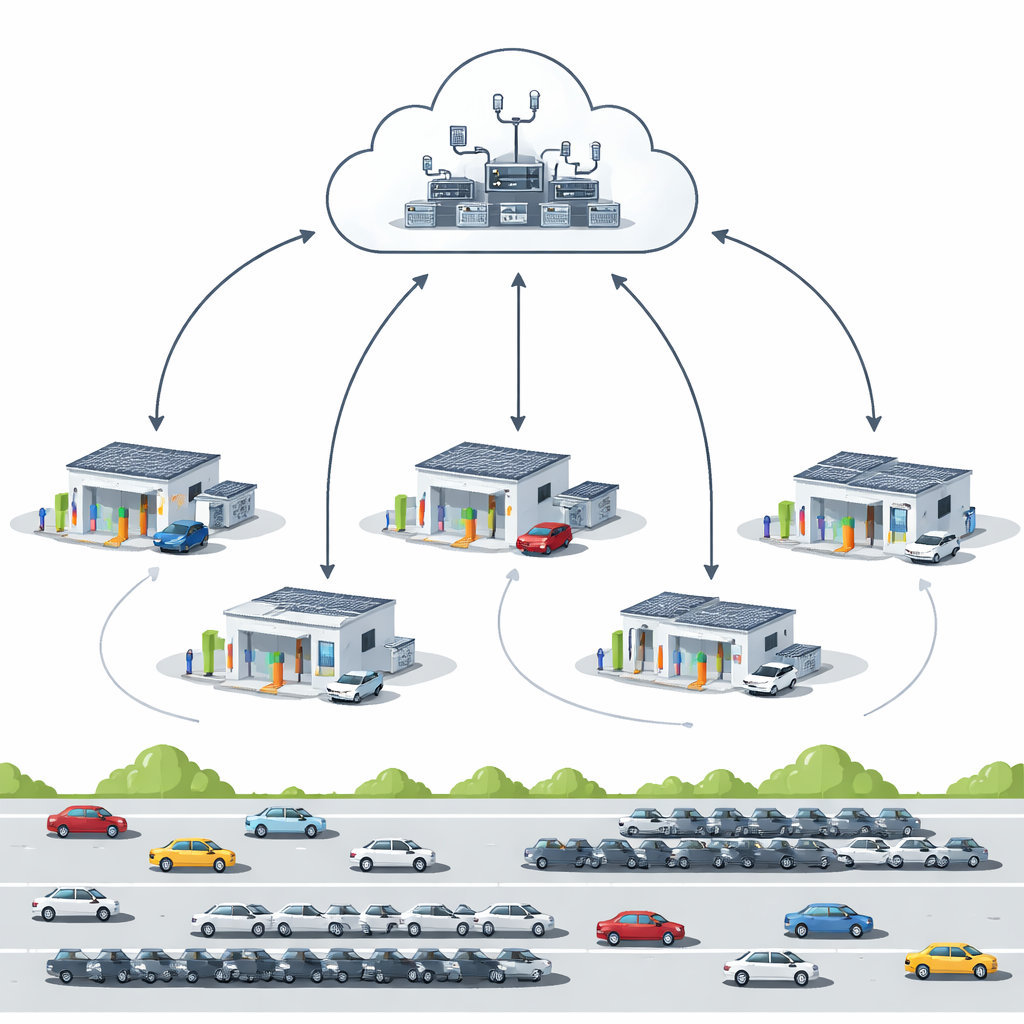
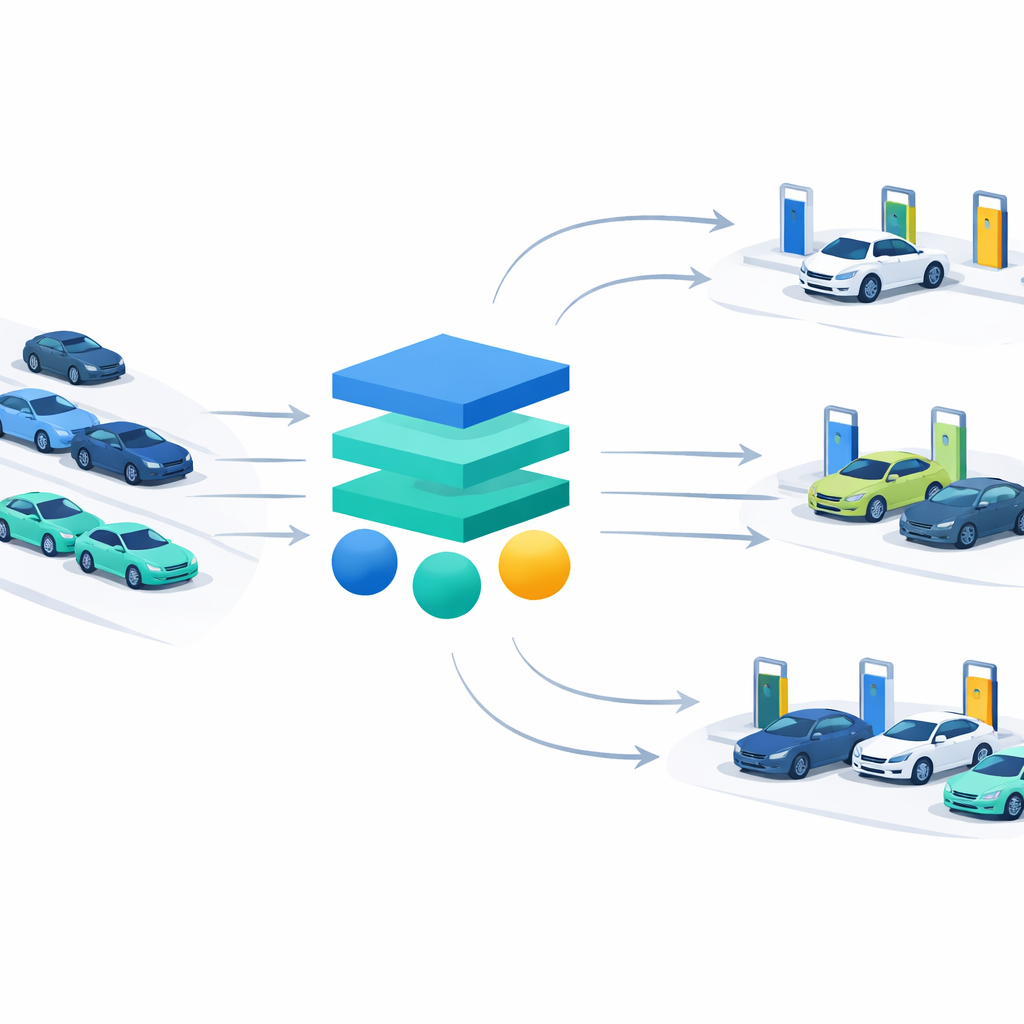
Ein digitaler Dispatcher für Fahrzeuge und Ladepunkte
Um dem zu begegnen, schlagen die Autorinnen und Autoren einen intelligenten Dispatcher vor, der im Netzwerk sitzt und sowohl mit Fahrzeugen als auch mit Ladestationen kommuniziert. Über Fahrzeug‑zu‑Infrastruktur‑Verbindungen, ähnlich heutigen Mobilfunknetzen, teilen Autos und Platoons periodisch einfache Informationen wie verbleibende Batteriekapazität, gewünschte Lademenge und aktuelle Position. Der Dispatcher kennt außerdem die Straßenführung, die Auslastung der einzelnen Straßenabschnitte und die maximale Leistungsabgabe jeder Ladesäule. Mit diesen kombinierten Daten weist er jedes Fahrzeug oder Platoon einer konkreten Station zu und empfiehlt geeignete Fahrgeschwindigkeiten, mit dem Ziel, die insgesamt für Anfahrt und Laden aufgewendete Zeit zu minimieren und gleichzeitig eine Überlastung einzelner Stationen zu verhindern.
Wie die intelligente Planung funktioniert
Im Hintergrund löst das System ein komplexes Puzzle: Wer soll zu welcher Station fahren, und mit welcher Geschwindigkeit sollte jedes Fahrzeug oder Platoon unterwegs sein, damit es die Station erreicht, ohne die Batterie zu entleeren. Da Platoons mehrere Anschlüsse gleichzeitig belegen, beeinflussen ihre Zuweisungen stark die Optionen aller anderen. Die Autorinnen und Autoren teilen dieses Puzzle in zwei abwechselnde Phasen auf. Zuerst wählt der Dispatcher mit einer suchbasierten Methode, die von stufenweiser Planung inspiriert ist, oder mit einer schnelleren, gierigen Abkürzung Stationenzuweisungen unter den Regeln, dass keine Station ihre Anzahl an Anschlüssen überschreiten darf und jedes Fahrzeug genau einen Halt wählen muss. Anschließend, bei festen Zuweisungen, optimiert ein schwarminspirierter Algorithmus die Geschwindigkeiten von Fahrzeugen und Platoons innerhalb zulässiger Grenzen, sodass Energieverbrauch, Fahrzeit und Ladezeit zusammen verbessert werden. Dieser Prozess wiederholt sich und verfeinert beide Entscheidungen schrittweise, bis weitere Verbesserungen gering sind.
Was Simulationen über besseres Laden zeigen
Computersimulationen untersuchen, wie sich diese koordinierte Strategie unter verschiedenen realistischen Bedingungen schlägt. Im Vergleich zu einfachen Regeln wie „geh immer zur nächstfreien Station“ oder zu naheliegenden gierigen Entscheidungen reduziert die vorgeschlagene Methode konstant die insgesamt für Fahren und Laden aufgewendete Zeit. Die Vorteile werden besonders deutlich, wenn viele Platoons unterwegs sind oder nahegelegene Stationen nur begrenzte Kapazität haben. Die Ergebnisse geben mehrere Gestaltungsprinzipien preis: Eine Verteilung derselben Gesamtanzahl an Anschlüssen auf mehr Stationen verringert meist die Gesamtzeit, weil mehr Fahrende eine relativ nahe Station finden können; höhere Ladeleistungen verkürzen erwartbar die Ladevorgänge, wirken jedoch am besten in Kombination mit intelligenter Planung; und sehr große Platoons, obwohl auf der Straße effizient, können an Stationen die Wartezeiten stark erhöhen, wenn ihr Laden nicht sorgfältig koordiniert wird.
Was das für künftige E‑Fahrten bedeutet
Alltagsnah zeigt die Studie, dass intelligentere Koordination—nicht nur mehr Hardware—elektrische Mobilität schneller und zuverlässiger machen kann. Indem Konvois als gleichwertige Elemente in die Ladeplanung einbezogen und sowohl Haltepunkte als auch Fahrgeschwindigkeiten abgestimmt werden, reduziert das vorgeschlagene Rahmenwerk die Überfüllung beliebter Stationen und verkürzt die kombinierte Fahr‑und‑Lade‑Erfahrung. Mit wachsendem EV‑Bestand und zunehmender Übernahme von Platooning durch kommerzielle Flotten könnte solche gemeinsame Planung Städten und Straßenbetreibern helfen, reibungslosere Fahrten zu ermöglichen, ohne ständig neue Ladepunkte hinzufügen zu müssen, und weist so auf ein effizienteres und nutzerfreundlicheres elektrisches Straßensystem hin.
Zitation: Qi, L., Wu, B., Li, S. et al. Efficient charging scheduling through coordination of electric vehicle platoons and charging stations. Sci Rep 16, 8773 (2026). https://doi.org/10.1038/s41598-026-39376-9
Schlüsselwörter: Aufladen von Elektrofahrzeugen, Fahrzeugplatooning, intelligenter Verkehr, Planung von Ladestationen, Verkehrsoptimierung