Clear Sky Science · de
Sequentielle modellvorhersagende direkte Drehzahlregelung von PMSM
Klügere Regelung für alltagstaugliche Elektromotoren
Elektromotoren treiben unauffällig Fließbänder, Pumpen, Roboter und sogar manche Haushaltsgeräte an. Diese Motoren effizient und ruhig laufen zu lassen spart Energie, reduziert Lärm und Verschleiß und erhöht die Zuverlässigkeit. Dieser Beitrag untersucht eine neue Methode zur Regelung eines weit verbreiteten Motortyps, damit er schnell auf Änderungen reagiert, ohne instabil zu werden oder übermäßiges elektrisches „Rauschen“ zu erzeugen. Die Autoren konzentrieren sich auf eine Strategie, die eine einfachere Abstimmung für Ingenieure verspricht und dennoch schnelle und genaue Drehzahlregelung liefert.
Warum heutige Motorregelungen schwer zu justieren sind
Permanentmagnet-Synchronmotoren werden häufig eingesetzt, weil sie kompakt, effizient und in der Lage sind, die Drehzahl präzise zu regeln. Traditionelle Regelungskonzepte beruhen auf mehreren geschachtelten Regelkreisen und einer Vielzahl von Einstellparametern, die Ingenieure oft durch Ausprobieren anpassen müssen. Neuere Ansätze auf Basis prädiktiver Regelung versuchen, für einen Bruchteil einer Sekunde in die Zukunft die beste Aktion für den Motor auszuwählen, verbessern so die Reaktionszeit und erlauben die gleichzeitige Berücksichtigung mehrerer Ziele (z. B. genaue Drehzahl und niedriger Stromverbrauch). Allerdings fassen diese prädiktiven Regler typischerweise alle Ziele in einen großen mathematischen Ausdruck zusammen, der von mehreren "Gewichtungsfaktoren" abhängt. Diese Gewichte zu wählen ist berüchtigt schwierig: eine gute Wahl kann exzellente Leistung bringen, eine schlechte kann das System träge machen oder sogar instabil.
Eine Schritt‑für‑Schritt‑Methode zur Entscheidungsfindung
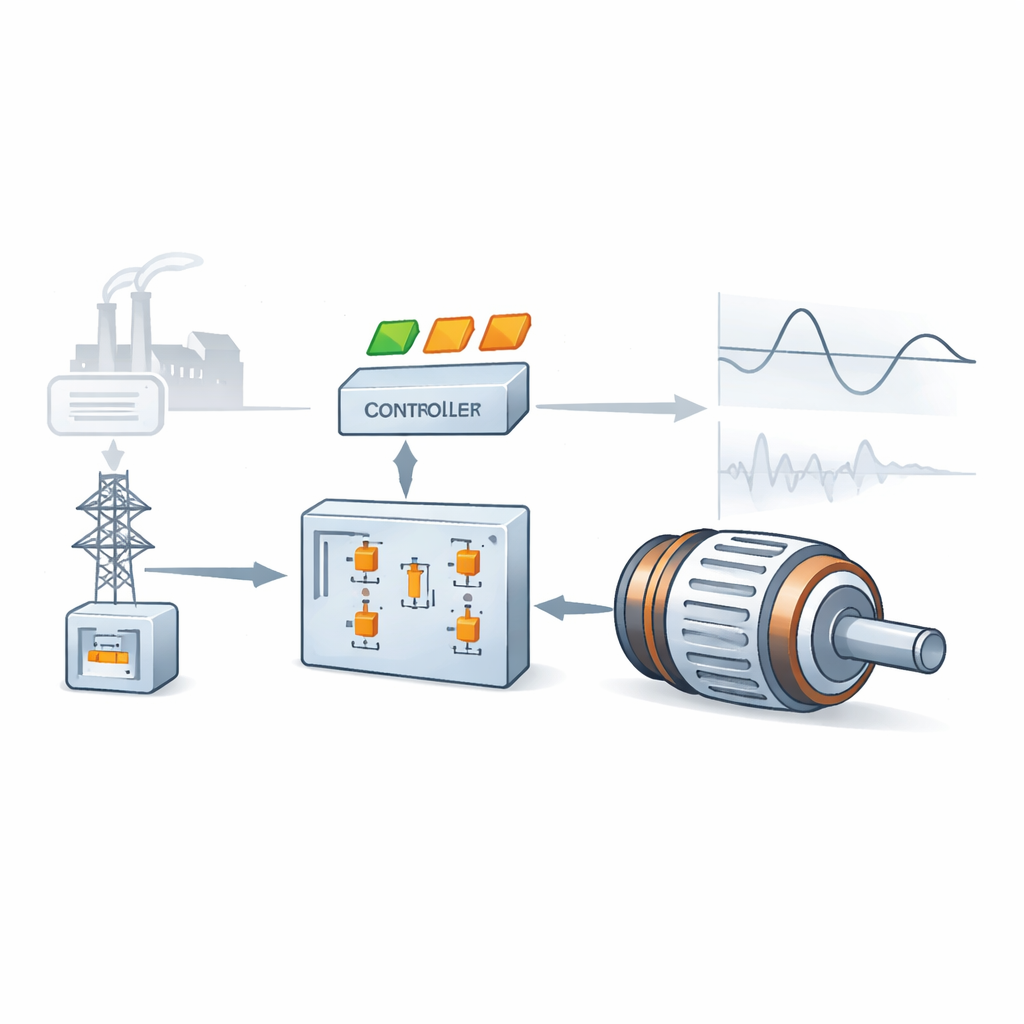
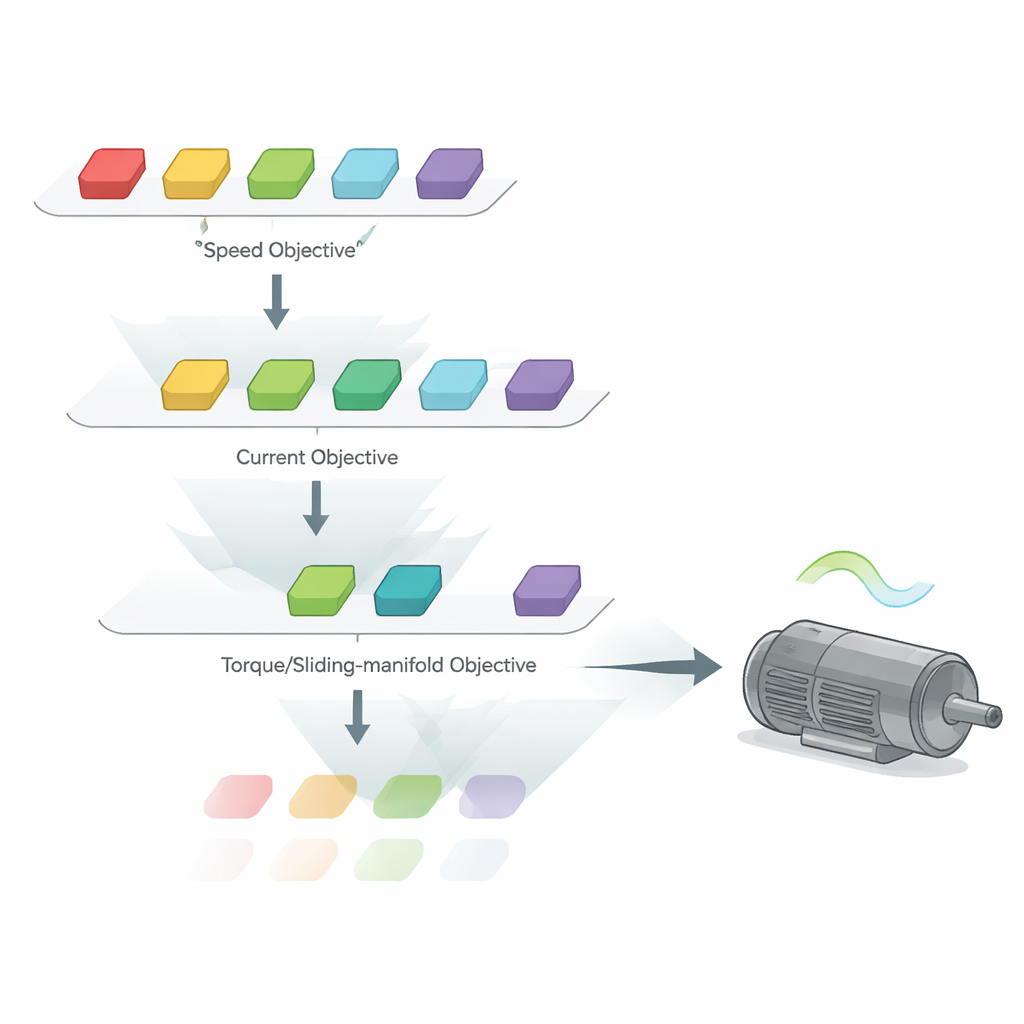
Anstatt alle Ziele in eine komplizierte Formel zu packen, untersuchen die Autoren einen "sequentiellen" Ansatz. Hier sagt der Regler weiterhin voraus, wie sich der Motor für jede mögliche Schaltposition in der Leistungselektronik verhalten wird, bewertet aber nacheinander getrennte, einfachere Ziele. Zuerst schließt er Schaltoptionen aus, die schlechtes Drehzahlverhalten ergeben würden. Dann behält er unter den verbleibenden Optionen nur solche, die den Strom effizient nutzen. Schließlich wählt er die Option aus, die das Motordrehmoment am besten formt, und zwar mit einer speziellen Gleitregel, die Drehzahlfehler und Drehmomentfehler verknüpft, sodass die Drehzahl schneller konvergiert. Da jeder Schritt ein einzelnes Ziel fokussiert, entfallen komplexe Gewichtungsfaktoren; stattdessen nutzt der Regler einen logischen Eliminationsprozess. Ein begleitender Beobachter schätzt das unbekannte Lastmoment an der Welle, sodass die Vorhersagen auch bei Störungen des Motors genau bleiben.
Stabilitätsverbesserung durch ein erweitertes Design
Als die Autoren die sequentielle Methode zunächst testeten, stellten sie fest, dass sie zwar schnell auf Drehzahländerungen reagierte, aber instabil werden und große Stromschwankungen im Motor erzeugen konnte, insbesondere wenn sie versuchten, die Reaktion noch schneller zu machen. Zur Behebung schlugen sie eine erweiterte Version vor, die dem ersten Entscheidungsschritt eine clevere Wendung hinzufügt: Sie betrachtet nicht nur die vorhergesagte Drehzahl, sondern bestraft auch sanft bestimmte Stromkomponenten und skaliert diese Bestrafung mit der geforderten Drehzahl. Bei niedrigen Geschwindigkeiten konzentriert sich der Regler stärker darauf, die Ströme zu beruhigen; bei höheren Geschwindigkeiten erlaubt er stärkere Eingriffe, um die Leistungsfähigkeit zu erhalten. Diese Änderung macht es möglich, eine aggressivere Gleitregel für das Drehmoment zu verwenden, ohne Instabilität auszulösen. In detaillierten Computersimulationen erreichte die erweiterte Methode ähnliche Anstiegszeiten wie ein gut abgestimmter konventioneller prädiktiver Regler und erzeugte vergleichbare elektrische Verzerrungsniveaus — und das mit weniger Abstimmparametern.
Prüfung der Methode im Labor
Das Team implementierte dann sowohl den ursprünglichen als auch den erweiterten sequentiellen Regler auf einem realen 1,1‑Kilowatt-Antrieb mithilfe einer Rapid‑Prototyping‑Plattform. Sie verglichen diese mit einem Standard‑Prädiktivregler unter realistischen Bedingungen, darunter schnelle Drehzahlanstiege, plötzliche Lastaufbringung und sogar Drehzahlumkehrungen. Der ursprüngliche sequentielle Regler konnte die Drehzahl regeln, zeigte jedoch gelegentlich instabiles Verhalten und starke Stromschwankungen, besonders bei höheren Drehzahlen. Im Gegensatz dazu lief die erweiterte Version über den getesteten Bereich stabil. Durch Anpassung eines einzigen Schlüsselfaktors, der die Gleitregel formt, konnten die Forscher zwischen strengerer Drehzahlverfolgung und ruhigeren Stromverläufen abwägen. Mittlere Einstellungen boten einen praktischen Kompromiss: Die Drehzahlfehler wurden gegenüber konservativen Einstellungen deutlich reduziert, während der Anstieg der Stromverzerrung im akzeptablen Bereich blieb.
Was das für reale Antriebe bedeutet
Für Nicht‑Spezialisten ist die Kernbotschaft, dass die Autoren einen einfacheren, aber dennoch leistungsfähigen Weg zur Regelung hochperformanter Elektromotoren demonstriert haben. Ihre erweiterte sequentielle Strategie nimmt viel von dem Ratespiel bei der Abstimmung traditioneller prädiktiver Regler heraus und bewahrt gleichzeitig schnelle Reaktionen auf Drehzahländerungen und Störungen. Die Methode ist nicht perfekt — die Stromverläufe sind bei sehr fordernden Einstellungen weiterhin etwas verrauscht — doch sie stellt einen wichtigen Schritt hin zu robusteren, leichter in Betrieb zu nehmenden Motorantrieben dar. Zukünftige Arbeiten werden sich auf die Verringerung dieser Stromverzerrungen und eine weitergehende Analyse der Stabilität konzentrieren, mit dem Ziel, diese Form der intelligenten sequentiellen Regelung für größere, enger geregelte industrielle Systeme geeignet zu machen.
Zitation: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Schlüsselwörter: Permanentmagnet-Synchronmotor, modellprädiktive Regelung, Motor-Drehzahlregelung, sequentielle Regelung, Leistungselektrische Antriebe