Clear Sky Science · de
Forschung zur intelligenten Erkennungsmethode für mechanische Bauteile mit hoher Ähnlichkeit der Merkmale in industrieller Umgebung
Warum das Erkennen ähnlicher Bauteile wichtig ist
Moderne Fabriken sind darauf angewiesen, dass Roboter tausende kleiner Metallteile finden, greifen und montieren. Viele dieser Teile — Zahnräder, Lager, Kettenräder, Muttern und Schrauben — sehen einander täuschend ähnlich, besonders bei ungünstiger Beleuchtung oder wenn sie sich auf einem Förderband überlappen. Verwechselt ein Roboter ein Teil mit einem anderen, kann das zu Blockaden, Fehlern oder sogar zu beschädigten Maschinen führen. Diese Studie behandelt eine auf den ersten Blick einfache, aber industrieweit bedeutende Frage: Wie kann ein kompaktes, schnelles Sichtsystem in realen Werkstattbedingungen nahezu identische Teile zuverlässig auseinanderhalten?
Herausforderungen der Fabrik‑Vision
Auf dem Fabrikboden haben Kameras selten die sauberen Sichtverhältnisse, die man aus Demonstrationsvideos kennt. Die Beleuchtung ist ungleichmäßig, was starke Reflexe auf glänzendem Metall und tiefe Schatten in anderen Bereichen erzeugt. Teile werden in Behälter geschüttet oder auf Bändern verstreut, sodass sie sich häufig gegenseitig verdecken. Erschwerend kommt hinzu, dass viele Metallkomponenten ähnliche Formen, Farben und Texturen teilen und nur wenige offensichtliche visuelle Hinweise übriglassen. Traditionelle Software, die Vorlagen abgleicht oder handgefertigte Merkmale verwendet, kommt unter diesen Bedingungen schlecht zurecht: sie ist langsam, empfindlich gegenüber Lichtänderungen und versagt oft, wenn Teile überlappen oder unerwartet gedreht sind.
Aufbauend auf schnellen One‑Shot‑Detektoren
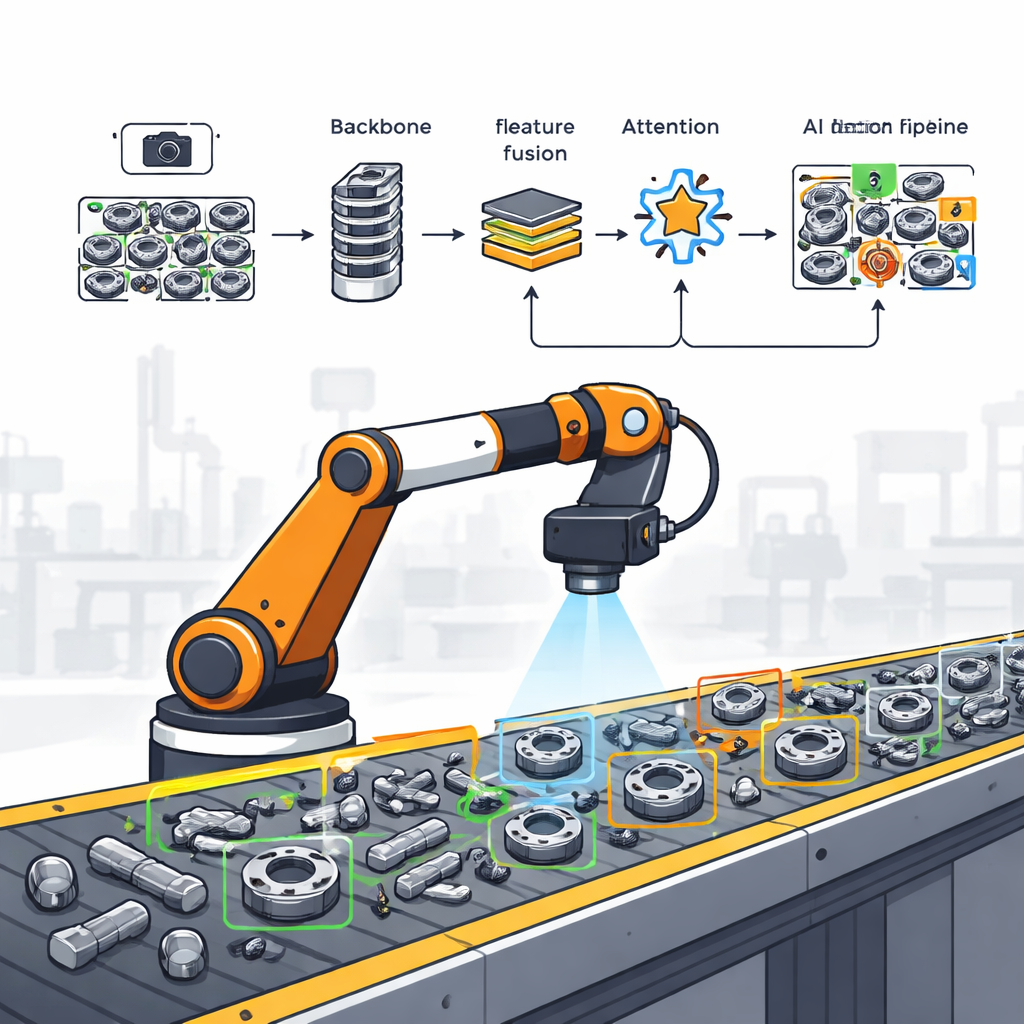
In den letzten Jahren ist eine Familie von KI‑Modellen namens YOLO (You Only Look Once) populär geworden, weil sie Objekte in Bildern in einem schnellen Durchlauf erkennt. YOLOv8, eine der jüngeren Versionen, bietet bereits einen guten Kompromiss aus Genauigkeit und Geschwindigkeit und kann in Echtzeit laufen. Wenn Teile sich jedoch fast identisch sehen, kann selbst YOLOv8 subtile Hinweise übersehen oder ungenaue Begrenzungsboxen ziehen. Frühere Versuche, YOLO‑Modelle für kleine Geräte zu verkleinern, schnitten oft Parameter, schwächten dabei aber auch die Fähigkeit, feine Details darzustellen — genau jene Information, die nötig ist, um sehr ähnliche mechanische Teile zu unterscheiden.
Ein schlankeres, aber schärferes Detektionsnetz
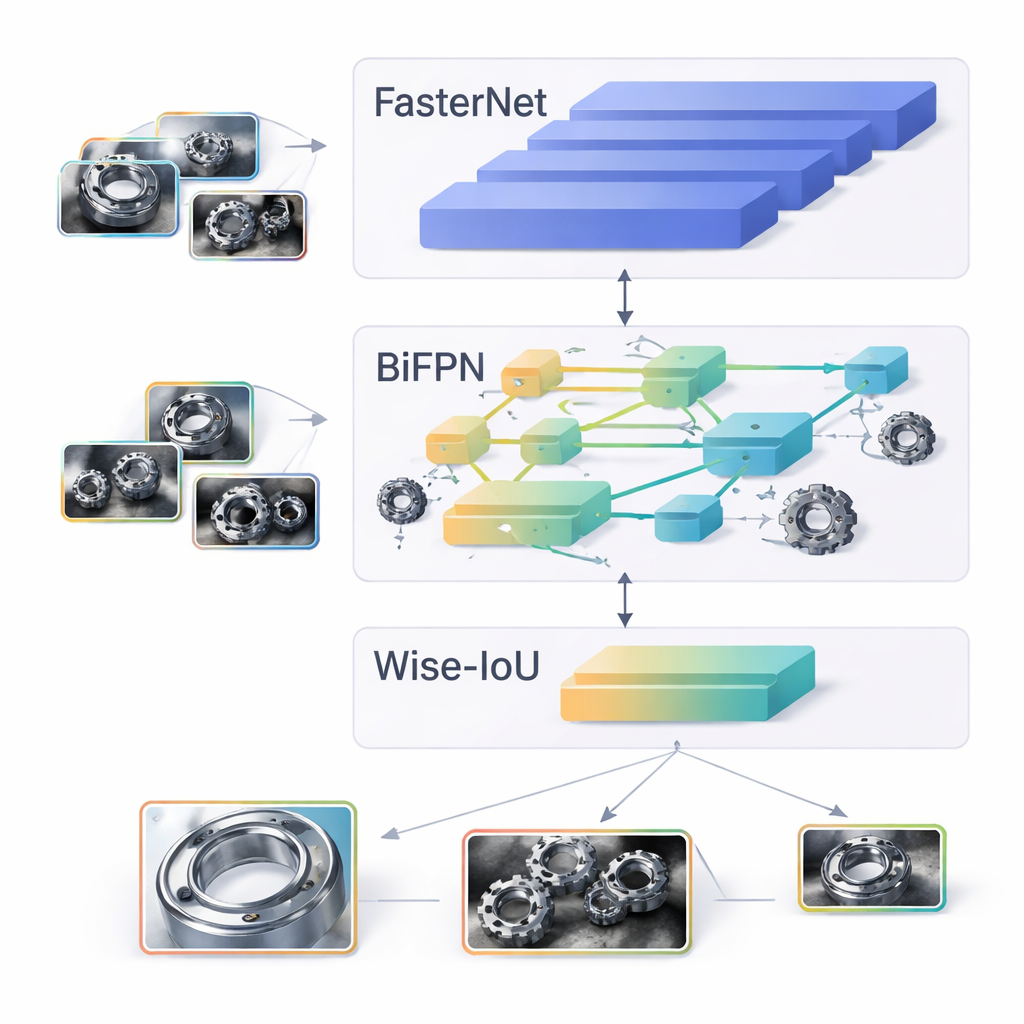
Die Autoren schlagen eine verbesserte Version des kleinsten YOLOv8‑Modells, genannt YOLOv8n, vor, die speziell für verwirrende Industriebauteile und für hardwarebeschränkte Rechner ausgelegt ist. Zunächst tauschen sie den Standard‑Netzkern gegen ein neueres Design namens FasterNet aus, das eine „partielle“ Faltungstechnik nutzt, um in jedem Schritt nur auf den nützlichsten Bildregionen zu arbeiten. Dadurch wird wiederholte Arbeit im Speicher reduziert, ohne wesentliche visuelle Informationen zu verlieren. Zweitens gestalten sie den mittleren „Neck“ des Netzes neu und verwenden ein bidirektionales Feature‑Pyramid‑Netz (BiFPN), das den Informationsfluss sowohl von groben, globalen Ansichten hin zu feinen Details als auch umgekehrt erlaubt, sodass kleine, verdeckte Teile vom Kontext profitieren und umgekehrt.
Das Netzwerk beibringen, falsche Hinweise zu ignorieren
Über die Netzwerkstruktur hinaus beeinflusst die Art, wie das Modell seine internen Einstellungen lernt — gesteuert durch eine Loss‑Funktion — stark, worauf es seine Aufmerksamkeit richtet. Standard‑Trainingsverfahren behandeln alle Beispiele mehr oder weniger gleich, sodass minderwertige Trainingsboxen (schlecht ausgerichtet oder mehrdeutig) das Modell in die Irre führen können. Die Autoren ersetzen die übliche Box‑Matching‑Regel durch eine Methode namens Wise‑IoU. Einfach ausgedrückt bewertet dieser Ansatz jedes Trainingsbeispiel nicht nur nach Überlappung, sondern danach, wie sehr es ein Ausreißer ist, und dämpft dann dezent den Einfluss dieser unzuverlässigen Beispiele. Im Laufe der Zeit lernt das System hauptsächlich aus klaren, gut beschrifteten Teilen, was zu präziseren und vertrauenswürdigeren Erkennungsboxen führt — besonders, wenn Teile überlappen oder unter schwieriger Beleuchtung erscheinen.
Das System auf die Probe stellen
Zur Bewertung ihres Entwurfs erstellte das Team eine eigene Bildsammlung von sechs gängigen mechanischen Bauteilen, von denen jedes 1.250‑mal unter unterschiedlichen Lichtverhältnissen und mit variierenden Grade an gegenseitiger Verdeckung aufgenommen wurde. Sie verglichen ihr verbessertes Modell mit dem Standard‑YOLOv8n und mehreren anderen leichtgewichtigen Detektoren. Das neue System erreichte eine höhere Gesamterkennungsqualität bei weniger als zwei Dritteln des Rechenaufwands und reduzierte die Anzahl der Parameter um etwa 42 %. Insbesondere steigerte es einen wichtigen Wert, die mittlere Durchschnittsgenauigkeit bei einem gebräuchlichen Schwellenwert, um 1,5 Prozentpunkte, während es weiterhin effizient genug lief, um in Echtzeit auf moderater Hardware eingesetzt zu werden.
Was das für smarte Fabriken bedeutet
Alltäglich gesprochen zeigt die Studie, dass Fabrikroboter sowohl intelligenter als auch sparsamer werden können. Mit dem neu gestalteten Netzwerkkern, einer klügeren Merkmalsfusion und einer selektiveren Lernregel kann ein kleines KI‑Modell ähnlich aussehende Zahnräder, Lager und andere Teile in unordentlichen, realen Szenen zuverlässiger unterscheiden — selbst bei schlechter Beleuchtung und Überlappungen. Diese Kombination aus höherer Genauigkeit und geringerem Rechenaufwand erleichtert den Einsatz robuster Bildverarbeitung auf kostengünstigen Edge‑Geräten und ebnet den Weg für flexiblere, vollautomatisierte Produktionslinien, ohne große Server oder perfekt kontrollierte Umgebungen zu benötigen.
Zitation: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
Schlüsselwörter: industrielle Objekterkennung, mechanische Bauteile, leichtgewichtige Deep‑Learning‑Modelle, YOLOv8, Fabrikautomation