Clear Sky Science · de
Rekonstruktionsstrategie für Fahrzeugtrajektoriedaten zur Videoerkennung basierend auf einem zweistufigen Verfahren aus Interpolations- und Filterungsschritten
Warum die Bereinigung digitaler Verkehrsdaten wirklich wichtig ist
Jedes Mal, wenn eine Verkehrskamera Fahrzeuge an einer Kreuzung beobachtet, erzeugt sie einen verborgenen Datenstrom, der beschreibt, wohin jedes Fahrzeug fährt, wie schnell es sich bewegt und wie es beschleunigt oder bremst. Diese Informationen sind Gold wert für sicherere Straßen, intelligentere Ampeln und zukünftige autonome Fahrzeuge. In der Praxis sind diese Daten jedoch unordentlich: Fahrzeuge werden hinter Lkw verdeckt, Scheinwerfer blenden bei Regen und Systeme zur Computer-Vision machen Fehler. Diese Studie geht eine sehr praxisorientierte Frage an: Wie kann man aus fehlerhaften Videodaten ein verlässliches Protokoll darüber machen, wie sich Fahrzeuge tatsächlich bewegen?
Wenn Kameras die Fahrzeugbewegung falsch erfassen
Videobasiertes Tracking ist attraktiv, weil es kostengünstig, nicht-invasiv und flächendeckend einsetzbar ist. Doch die Rohdaten sind von zwei Hauptproblemen geprägt. Das erste sind offensichtliche Fehler, wie ein Fahrzeug, das scheinbar rückwärts springt, plötzlich von Autobahngeschwindigkeit anhält oder unrealistische Beschleunigungsschübe zeigt. Diese entstehen meist durch Okklusion, Bewegungsunschärfe oder wenn die Tracking-Software das Fahrzeug kurzzeitig verliert. Das zweite Problem ist zufälliges Zittern — kleine, schnelle Auslenkungen in den gemeldeten Positionen. Sinkt man auf Basis dieser Positionen auf Geschwindigkeit und Beschleunigung, werden die Auslenkungen verstärkt und normales Fahren sieht erratisch aus. Bleiben diese Fehler unkorrigiert, können sie Verkehrsmodelle um mehr als 40 Prozent verzerren und damit Sicherheitsstudien und Systeme für autonomes Fahren in die Irre führen.
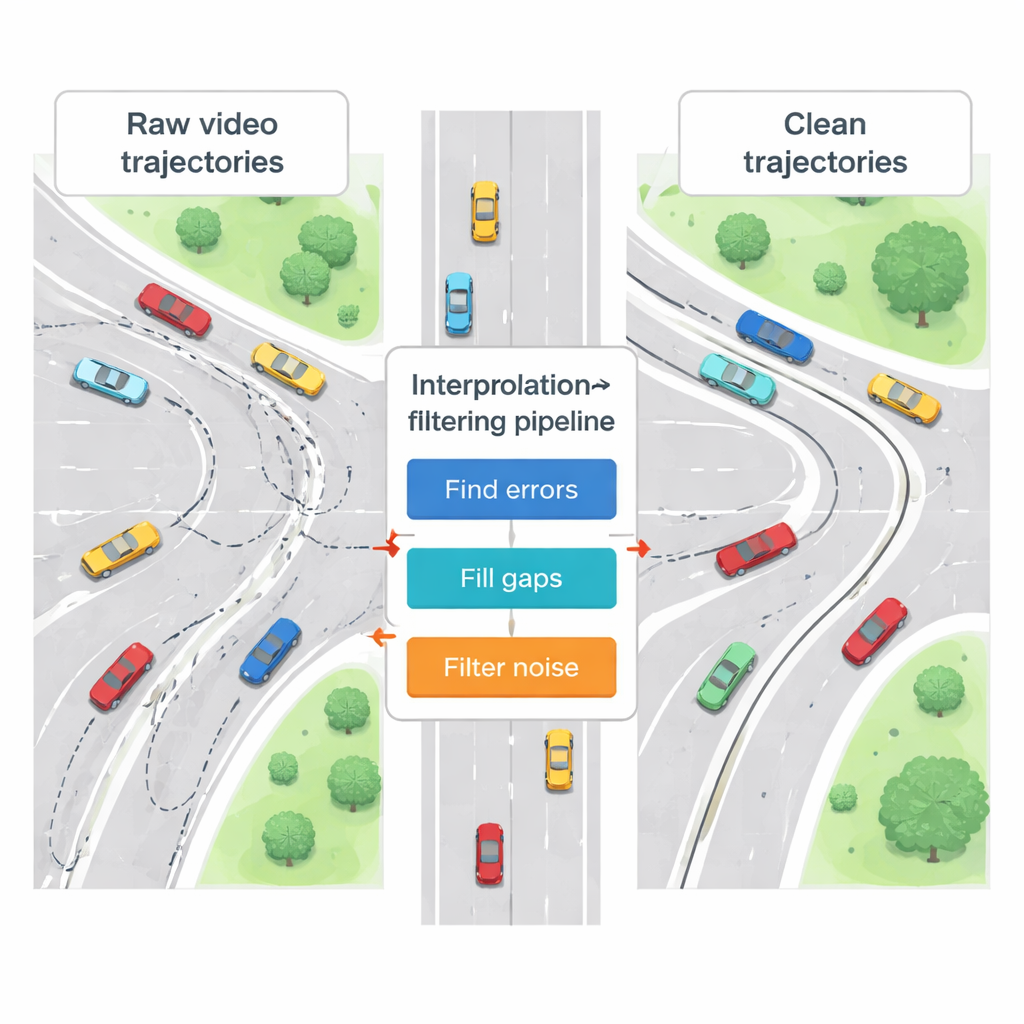
Ein zweistufiger Bereinigungsplan
Um diesen Schaden zu beheben, schlagen die Autorinnen und Autoren eine zweistufige Rekonstruktionsstrategie vor, die wie ein sorgfältiger digitaler Mechaniker arbeitet. Schritt eins konzentriert sich auf offensichtliche Fehler: Er durchsucht die Aufzeichnungen jedes Fahrzeugs nach Geschwindigkeiten und Beschleunigungen, die einfache physikalische Grenzen überschreiten, etwa extremen Ruck (sehr plötzliche Änderungen der Beschleunigung) oder Beschleunigungen, die ein reales Fahrzeug und ein Fahrer nicht tolerieren könnten. Sobald diese Ausreißerpunkte erkannt sind, werden sie durch Interpolation ersetzt — mathematische Verfahren, die fehlende Werte aus benachbarten, zuverlässigeren Punkten schätzen. Die Studie vergleicht mehrere Interpolationsvarianten und stellt fest, dass eine sogenannte Hermite-Interpolation die natürliche Form der Trajektorie besser bewahrt als die traditionellere Lagrange-Methode, insbesondere bei komplexen Bewegungen.
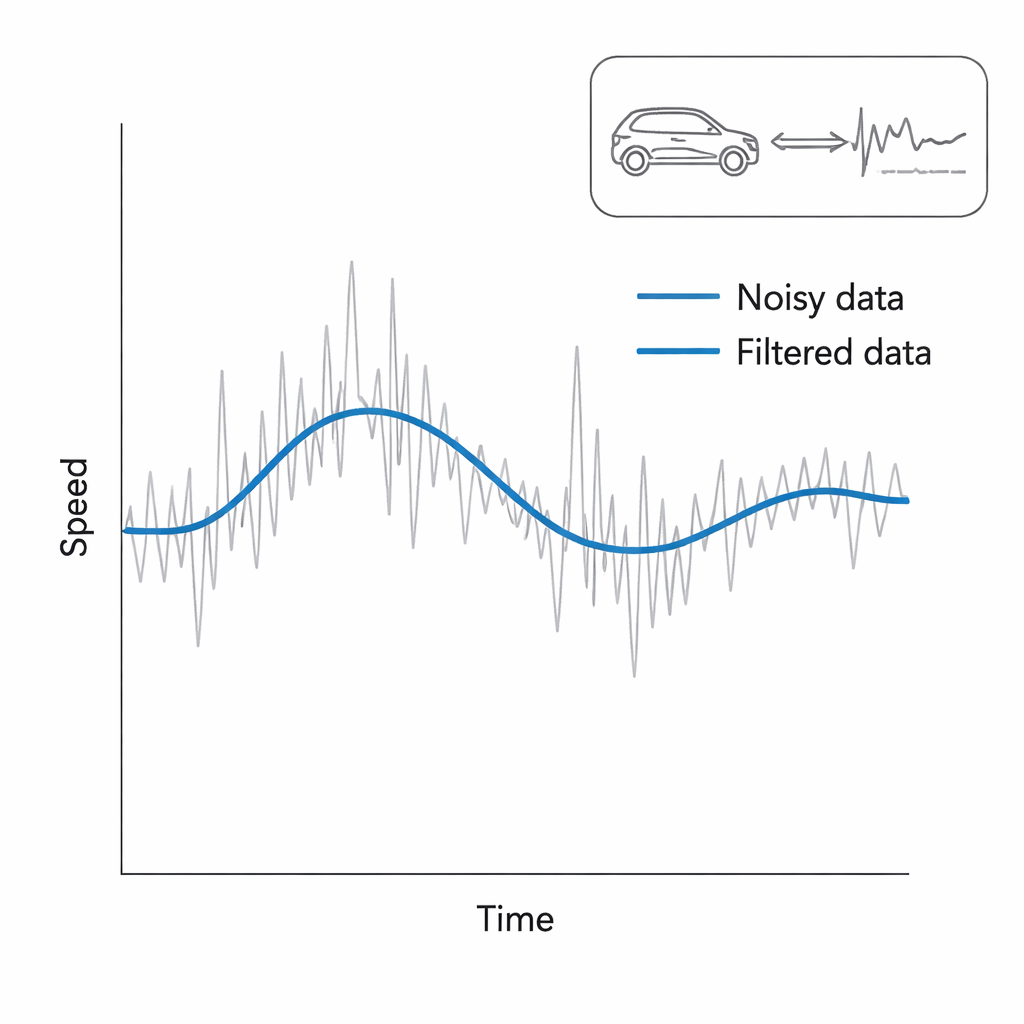
Die digitale Fahrt glätten
Schritt zwei adressiert das subtilere Problem des Rauschens. Selbst nachdem grobe Fehler korrigiert wurden, können die verbleibenden Spuren leicht zittrig wirken. Hier testen die Forschenden zwei Methoden zur Glättung der Daten: ein verfeinertes gleitendes Mittel, das neueren Punkten mehr Gewicht gibt, und eine statistische Technik namens Kalman-Filter, die ihre beste Schätzung von Position und Geschwindigkeit eines Fahrzeugs kontinuierlich aktualisiert, sobald neue Messungen eintreffen. Beide Techniken dämpfen das Zittern, aber der Kalman-Filter folgt realen Änderungen im Fahrverhalten — etwa einer sanften Bremsung oder einem Spurwechsel — besser, ohne diese zu verwischen. Das Ergebnis ist eine glattere, realistischere Beschreibung davon, wie sich jedes Fahrzeug über die Zeit tatsächlich verhielt.
Die Methode auf die Probe stellen
Das Team wendet sein Konzept auf reale Videos an, die an einer stark befahrenen städtischen Kreuzung in Zhengzhou, China, aufgenommen wurden, und verwendet moderne Objekterkennungs- und Tracking-Software, um Fahrzeugspuren zu extrahieren. Anschließend führen sie Dutzende unterschiedlicher Fahrzeugtrajektorien durch ihren zweistufigen Prozess und bewerten den Erfolg mit einfachen physikalischen Maßstäben: wie stark die Beschleunigung schwankt und wie häufig der Ruck ein für Pkw als unrealistisch angesehenes Niveau überschreitet. Sie vergleichen die bereinigten videobasierten Trajektorien außerdem mit Referenzdaten, die direkt aus den Armaturen eines Fahrzeugs aufgezeichnet wurden. Über viele Fahrmuster hinweg — konstantes Fahren, hartes Bremsen, Spurwechsel — reduziert die kombinierte Interpolations- und Filterstrategie die Beschleunigungsvariabilität um etwa 85 Prozent und eliminiert nahezu alle unrealistischen Ruckspitzen, während sie den instrumentenbasierten Aufzeichnungen näherkommt als mehrere konkurrierende Methoden.
Was das für den Alltag bedeutet
Einfach ausgedrückt zeigt dieser Artikel, wie man unvollkommene Aufnahmen gewöhnlicher Verkehrskameras in Daten verwandelt, denen Ingenieurinnen, Ingenieure und autonome Fahrzeuge tatsächlich vertrauen können. Indem offensichtliche Fehler zuerst repariert und anschließend das Rauschen behutsam geglättet wird, erzeugt die vorgeschlagene Methode realistische digitale Spuren der Fahrzeugbewegungen, ohne exotische Hardware oder hohe Rechenleistung zu verlangen. Dieses sauberere Bild kann in bessere Ampelsteuerung, genauere Stau-Simulationen und sicherere Algorithmen für autonomes Fahren einfließen, die auf dem Verständnis des realen Fahrverhaltens basieren. Die Studie konzentriert sich zwar auf eine Stadt und deckt noch nicht alle Wetter- oder Straßenverhältnisse ab, sie weist jedoch einen klaren und praktikablen Weg, bestehende Videonetzwerke als verlässliche Sensoren für die nächste Generation intelligenter Verkehrssysteme zu nutzen.
Zitation: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Schlüsselwörter: Fahrzeugtrajektorie, Verkehrsvideodaten, Datenentzerrung, intelligenter Verkehr, autonomes Fahren