Clear Sky Science · de
ESO-basierte adaptive neuronale Netzregelung für einen Quadrotor gegen Wind- und Nutzlaststörungen
Drohnen in der unordentlichen Realität stabil halten
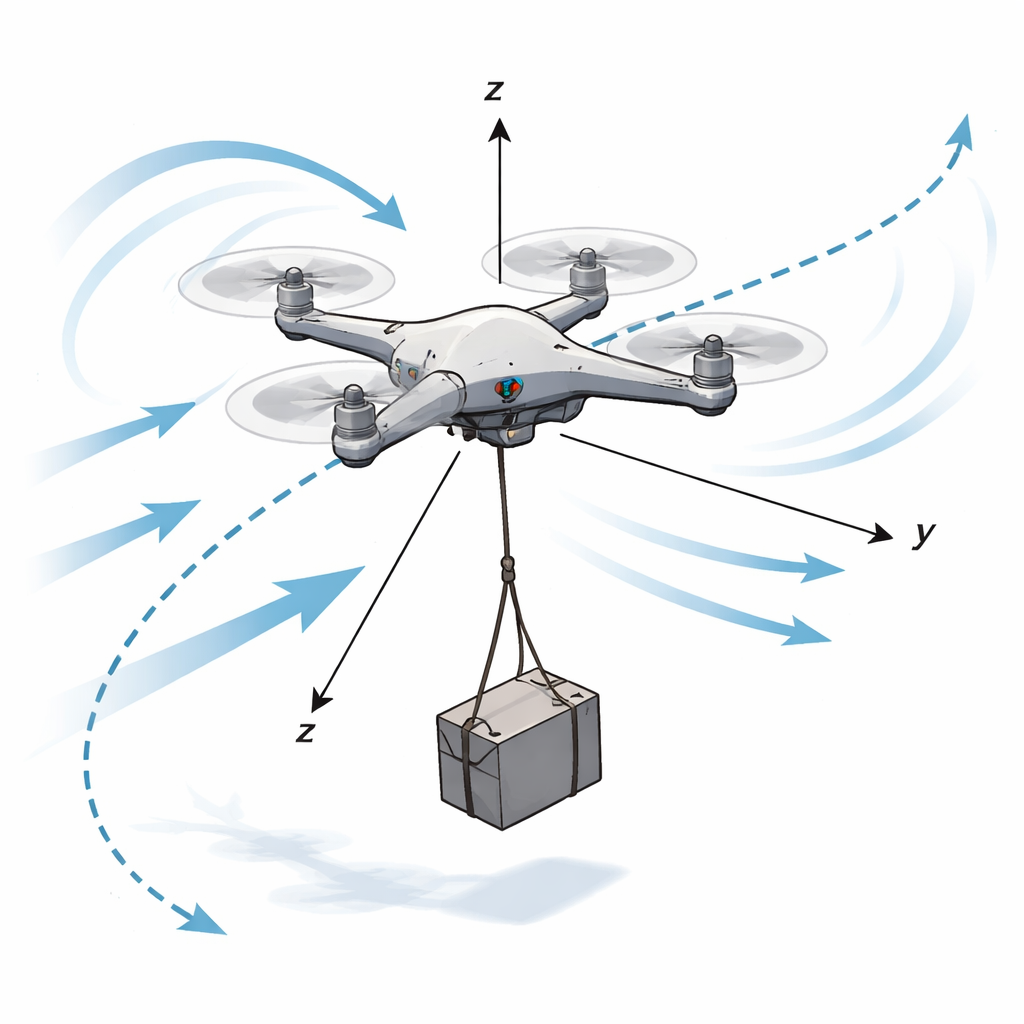
Kleine Vierrotor-Drohnen werden zunehmend für Aufgaben wie Brückeninspektion, Feldüberwachung oder den Transport kleiner Pakete eingesetzt. In der realen Welt begegnen diese fliegenden Roboter jedoch böigen Winden und schlingernden Lasten unterhalb der Drohne, die sie leicht aus der Bahn bringen können. Dieses Papier stellt einen neuen Ansatz vor, um solche Drohnen entlang geplanter Bahnen stabil zu halten, selbst wenn die Luft rau ist und eine pendelnde Nutzlast an ihnen zieht.
Warum Wind und hängende Lasten so problematisch sind
Ein Quadrotor ist von Natur aus schwer zu regeln. Er ist leicht, reagiert schnell auf kleine Motoränderungen, und seine Bewegungen in verschiedenen Richtungen sind eng gekoppelt. Treffen starke oder schnell schwankende Winde auf die Drohne, wirken sie unvorhersehbare Kräfte. Eine an einem Kabel hängende Nutzlast, etwa ein Kameragerät oder eine Flasche, verschärft die Lage: Die Last kann wie ein Pendel schwingen und zusätzliche Kräfte in die Drohne zurückspeisen. Traditionelle Regler, wie der weit verbreitete PID-Ansatz oder fortgeschrittene Sliding-Mode- und Backstepping-Verfahren, funktionieren gut nur dann, wenn die Modellbeschreibung der Drohne sehr genau ist und die Störungen moderat bleiben. Ist das mathematische Modell ungenau oder ändern sich Wind- und Lastkräfte auf komplizierte Weise, führen diese Methoden zu träger Reaktion, Überschwingern oder sichtbarem Wackeln im Flug.
Ein intelligenter Wächter für versteckte Störungen
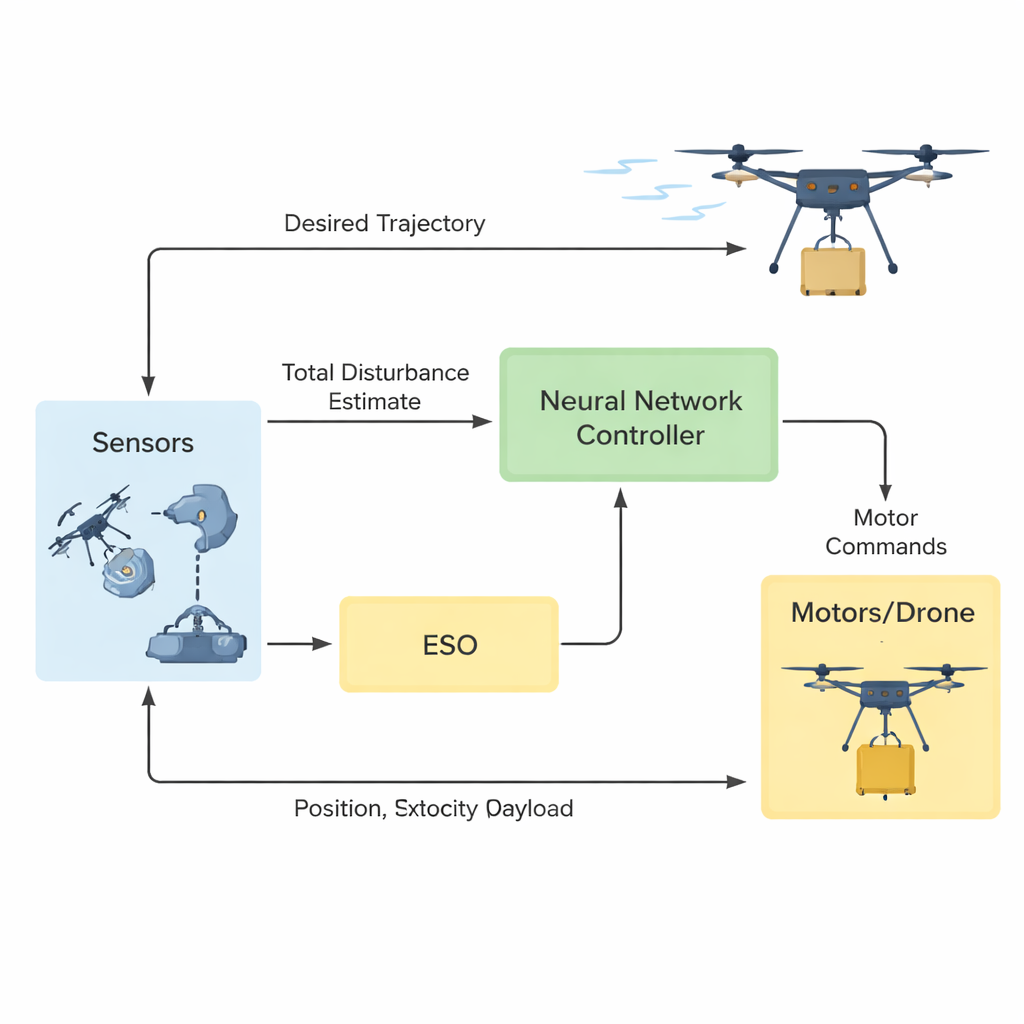
Zur Lösung dieses Problems bauen die Autoren auf dem Konzept der aktiven Störungsunterdrückung auf. Anstatt zu versuchen, jedes Detail von Wind und schwingender Nutzlast zu modellieren, fassen sie alle unbekannten Einflüsse zu einer einzigen „zusammengefassten“ Störung zusammen. Ein speziell entwickelter erweiterter Zustandsbeobachter wirkt wie ein mathematischer Wächter, der diese Gesamstörung laufend aus der Bewegung der Drohne schätzt. Bemerkenswert ist, dass ihr Beobachter mit nur einem Haupteinstellparameter auskommt, was die Einrichtung deutlich vereinfacht gegenüber vielen bestehenden Entwürfen. Die Theorie zeigt, dass bei geeigneter Abstimmung die Schätzung der Störung durch den Beobachter schnell konvergiert und stark beschränkt bleibt, sodass sie eher als echtzeitfähige Vorsteuerung denn als grobe Schätzung genutzt werden kann.
Das Schwierige dem neuronalen Netz überlassen
Selbst mit guten Störungsschätzungen muss der Regler wissen, wie Motorbefehle in tatsächliche Bewegungen umgesetzt werden — eine Beziehung, die von Masse, Geometrie und anderen physikalischen Details abhängt und sich im Laufe der Zeit ändern kann. Anstatt ein aufwändig identifiziertes Modell zu verwenden, führen die Autoren ein Radial-Basis-Funktions-Netzwerk ein, das diese Beziehung direkt aus Flugdaten erlernt. Der Regler benötigt lediglich die aktuelle Position der Drohne, das Sollziel und die zweite Ableitung der gewünschten Bahn (also wie schnell sich der Zielpunkt beschleunigt). Ein adaptives Gesetz passt laufend die internen Gewichte des neuronalen Netzes an, um Verfolgungsfehler zu verringern. Mittels einer Lyapunov-basierten Analyse beweisen die Autoren, dass unter diesem adaptiven Schema die Verfolgungsfehler gleichmäßig beschränkt bleiben und beliebig klein gemacht werden können, während die Gewichtsaktualisierungen stabil bleiben.
Erprobung der Methode
Das Team validiert seinen Ansatz sowohl durch Computersimulationen als auch durch Experimente in der realen Welt. In Simulationen soll die Drohne herausfordernde dreidimensionale Spiralbahnen folgen, während sie zufälligen Windböen und zeitlich veränderlichen Nutzlastkräften ausgesetzt wird. Der neue Regler wird mit drei anderen fortgeschrittenen Methoden verglichen: linearer aktiver Störungsunterdrückung, Sliding-Mode-Regelung, modellfreiem terminalem Sliding-Mode und in einem härteren Test mit adaptiver Fraktionsordnungsregelung. Über mehrere Szenarien hinweg erzielt die vorgeschlagene Methode glattere Trajektorien und kleinere root-mean-square-Positionsfehler, insbesondere nachdem Störungen eingeführt werden. In physischen Tests fliegen die Forscher einen Quadrotor in Innenräumen, während zwei Industriergebläse Luft auf ihn blasen und eine 200-Gramm-Wasserflasche darunter hängt. Bewegungsverfolgungskameras zeichnen die Position der Drohne auf. Selbst unter anhaltendem Wind und manuellen Zerren an der Nutzlast hält die Drohne ihren Zielpunkt innerhalb weniger Zentimeter, und die Motorbefehle bleiben wohlgeordnet, was darauf hindeutet, dass die Methode für reale Hardware praktikabel ist.
Was das für den Alltagseinsatz von Drohnen bedeutet
Für Nichtfachleute ist die zentrale Erkenntnis, dass diese Arbeit einen Weg bietet, Drohnen unter rauen Bedingungen zuverlässiger zu machen, ohne perfekte Kenntnis ihrer inneren Physik zu verlangen. Durch die Kombination eines einfachen, aber leistungsfähigen Störungsbeobachters mit einem lernbasierten Regler kann das System sich während des Flugs an Windböen und schlingernde Lasten anpassen und die Drohne mit minimalem Abstimmaufwand auf Kurs halten. Diese Art von robuster, modellarmer Regelung könnte den Einsatz von Drohnen für Routineaufgaben in Städten, auf Feldern und in Fabriken erleichtern, und dieselben Ideen lassen sich möglicherweise auf Schwärme von Drohnen und fehlertolerante Konstruktionen übertragen, die den Flug auch dann sicherstellen, wenn einzelne Komponenten ausfallen.
Zitation: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Schlüsselwörter: Quadrotorregelung, Drohnenstabilität, Windstörung, Neuronaler Netzregler, Lastverfolgung