Clear Sky Science · de
PCA-Whitening verbessert die Beleuchtungstoleranz bei visueller Ortsbestimmung mit Fouriersignaturen
Roboter, die sich drinnen zurechtfinden
Stellen Sie sich einen Roboter vor, der durch ein Haus oder Büro fährt, an einem Tag grelles Sonnenlicht und am nächsten Tag nur schwache Lampen vorfindet. Um zu wissen, wo er sich befindet, vergleicht der Roboter das, was seine Kamera jetzt sieht, mit zuvor gespeicherten Bildern. Wenn sich die Beleuchtung jedoch stark ändert, können Orte fast unkenntlich werden. Diese Arbeit untersucht eine schlanke, mathematisch fundierte Methode, mit der Roboter Orte aus Panoramabildern erkennen, und zeigt, wie ein statistischer Trick namens PCA-Whitening diese Methode deutlich unempfindlicher gegenüber Beleuchtungswechseln macht.
Die Welt als Wellen sehen, nicht als Pixel
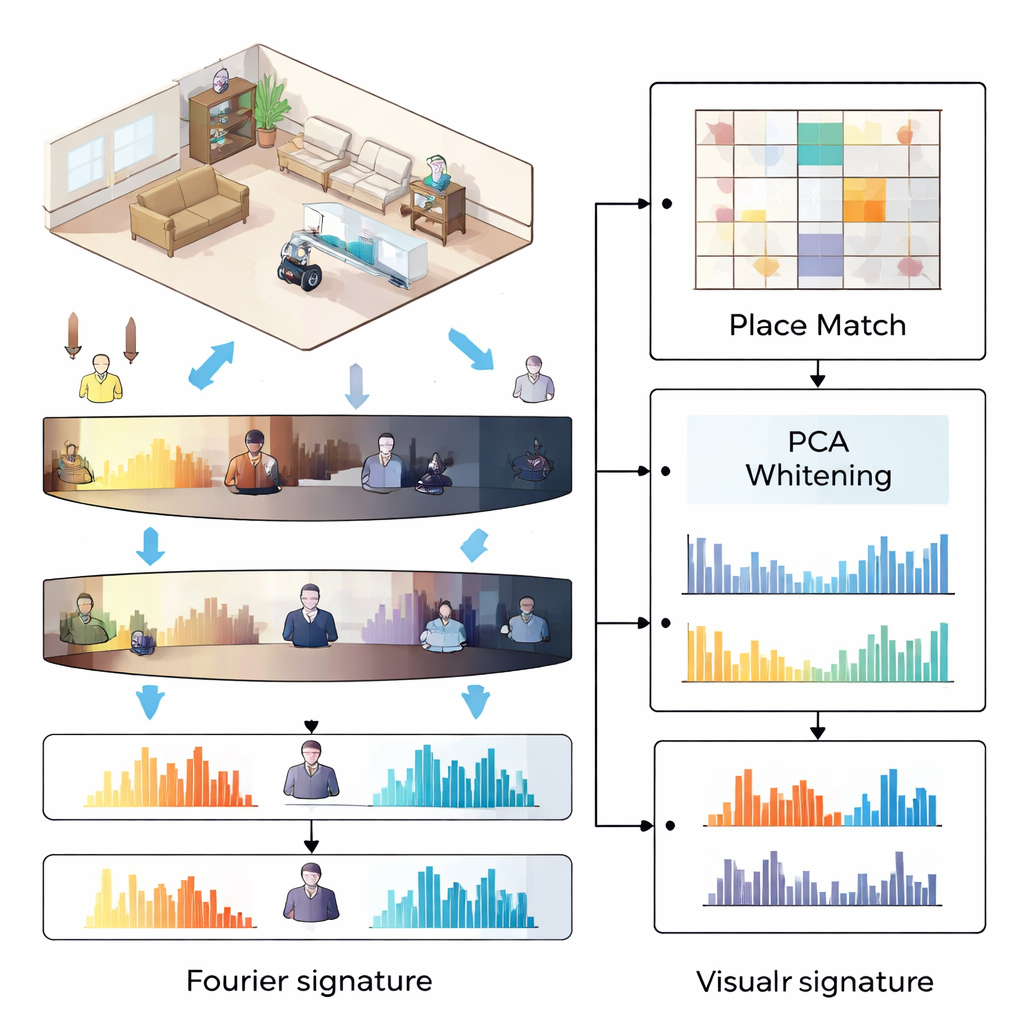
Die meisten modernen Systeme zur visuellen Ortsbestimmung nutzen viele kleine Bilddetails – Kanten, Ecken und Texturen – und fassen diese dann zu einem kompakten „Fingerabdruck“ zusammen. Im Gegensatz dazu baut diese Arbeit auf Fouriersignaturen auf, die ein Panorama nicht als Pixelgitter, sondern als Mischung von Wellen unterschiedlicher Frequenzen betrachten. Die Kamera erfasst eine 360-Grad-Ansicht; dieses Panorama wird in horizontale Bänder unterteilt, und jedes Band wird in ein eindimensionales Frequenzspektrum überführt. Es werden nur die Stärken (Amplituden) der tiefsten Frequenzen behalten und zu einem Deskriptor gestapelt. Weil die Methode Informationen darüber verwirft, an welcher Stelle entlang des Kreises Merkmale erscheinen, ändert sich der Deskriptor kaum, wenn sich der Roboter einfach dreht, was ihn auf natürliche Weise rotationsrobust macht.
Warum Beleuchtung einfache Signaturen zerstört
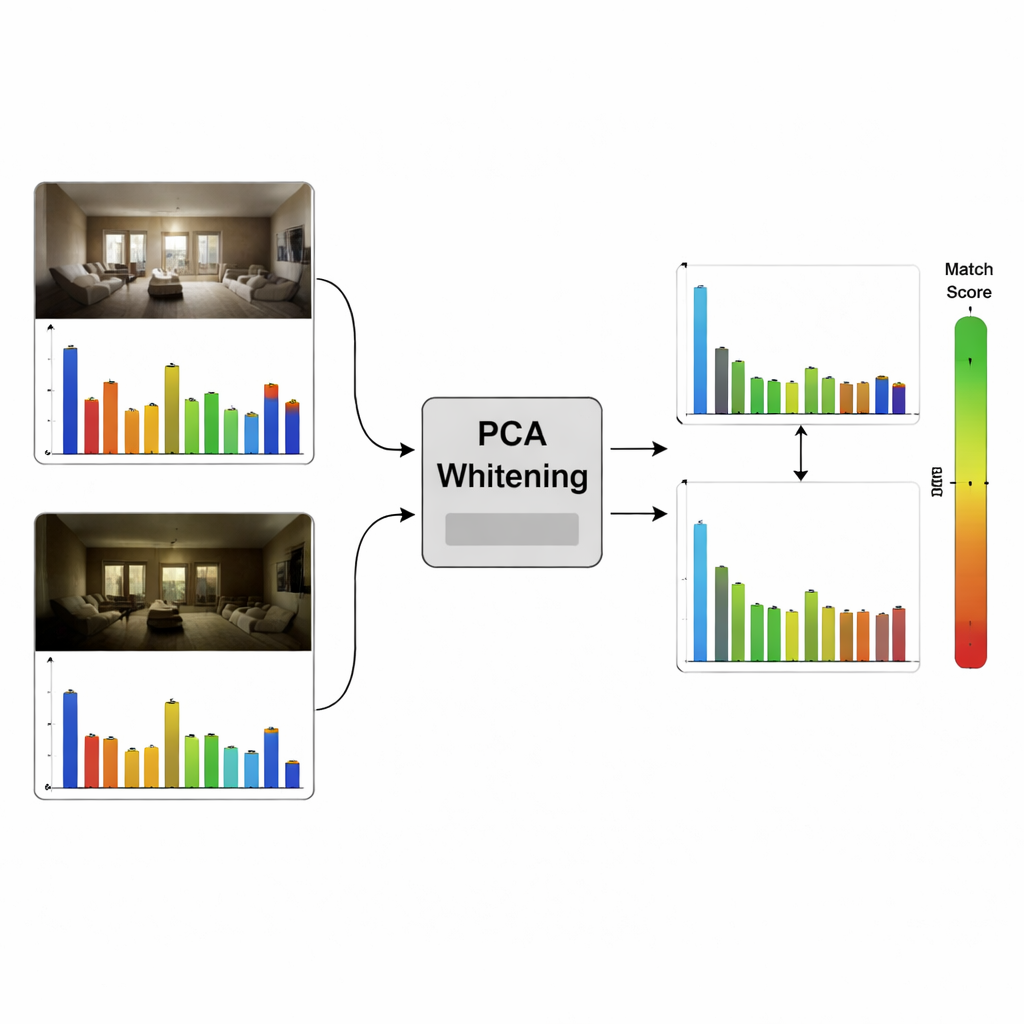
Obwohl Fouriersignaturen kompakt und schnell zu berechnen sind, haben sie Schwierigkeiten, wenn sich die Beleuchtung zwischen zwei Aufnahmen desselben Ortes stark unterscheidet. Natürliche Bilder haben tendenziell viel mehr Energie in niedrigen Frequenzen als in hohen, und dieses Ungleichgewicht wird durch die Beleuchtung beeinflusst. Infolgedessen dominieren manche Teile des Deskriptors die Ähnlichkeitsmessung, und viele Einträge sind stark miteinander korreliert, weil benachbarte Zeilen im Panorama ähnlich aussehen. Ohne Korrektur wird die Entscheidung des Systems, ob zwei Bilder denselben Ort zeigen, von einer kleinen, redundanten Teilmenge von Werten getrieben, wodurch es gegenüber unterschiedlichen Lichtverhältnissen fragil wird.
Das Signal mit PCA-Whitening säubern
Der Autor schlägt vor, PCA-Whitening als Nachbearbeitungsschritt für die Fourierdeskriptoren hinzuzufügen. Mithilfe einer Sammlung von Trainingspanoramen aus sieben Innenumgebungen lernt das System, wie Deskriptoreinträge typischerweise variieren und miteinander korrelieren. PCA-Whitening zentriert dann den Deskriptor neu, rotiert ihn in Richtungen unabhängiger Variation und skaliert jede Richtung so, dass alle den gleichen Einfluss haben. Dadurch werden redundante Korrelationen entfernt und der Beitrag verschiedener Frequenzen ausgeglichen. Da die transformierten Einträge nach Bedeutung sortiert sind, kann der Deskriptor auch sicher verkürzt werden, indem einfach das Ende abgeschnitten wird. Experimente in drei unbekannten Umgebungen mit mehreren Beleuchtungsvarianten zeigen, dass Whitening die Wahrscheinlichkeit erhöht, dass der korrekte Ort unter den obersten abgerufenen Kandidaten erscheint – besonders im praxisrelevanten Fall, dass nur eine kleine Liste wahrscheinlicher Treffer zurückgegeben wird.
Leichtgewichtig, aber konkurrenzfähig mit Deep Learning
Um einzuschätzen, wie sich dieser schlanke Ansatz gegen aktuelle Trends behauptet, vergleicht die Arbeit ihn mit AnyLoc, einer aktuellen Methode zur visuellen Ortsbestimmung, die auf einem sehr großen Vision-Transformer-Netzwerk basiert. AnyLoc verwendet ebenfalls PCA-basierte Kompression, geht dabei aber von hochdimensionalen Merkmalen aus, die durch Deep Learning erzeugt werden. Auf dem panoramischen Indoor-Datensatz erreichen die whitened Fouriersignaturen Ergebnisse, die mit AnyLoc mithalten oder es sogar übertreffen, wenn das System bis zu etwa zehn Kandidaten vorschlagen darf – ein realistischer Betriebsbereich für viele Roboter. Entscheidend ist, dass die Fourier-basierte Methode deutlich günstiger im Betrieb ist: Sie beruht auf schnellen Fouriertransformationen und einfachen Matrixoperationen auf der CPU, während AnyLoc eine leistungsstarke GPU und deutlich mehr Zeit pro Bild benötigt.
Was das für Alltagsroboter bedeutet
Für eine allgemeinlesende Zielgruppe ist die Kernbotschaft, dass kluge Anwendung klassischer Mathematik in bestimmten Aufgaben immer noch mit massivem KI-Einsatz konkurrieren kann. Indem Panoramabilder in ausgeglichene, dedekorrelierte Deskriptoren transformiert werden, macht PCA-Whitening eine einfache, frequenzbasierte Ortsbestimmung deutlich widerstandsfähiger gegenüber Beleuchtungsänderungen. Roboter, die diesen Ansatz nutzen, können sich in Wohnungen und Büros unter einer breiten Palette von Lichtverhältnissen zuverlässig lokalisieren und dabei moderate Rechenressourcen verwenden. Das macht robuste visuelle Navigation für kleinere, günstigere Roboter zugänglicher, die eines Tages unsere Alltagsräume teilen könnten.
Zitation: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
Schlüsselwörter: visuelle Ortsbestimmung, mobile Roboter, panoramische Bildgebung, Fouriersignaturen, PCA-Whitening