Clear Sky Science · de
Verbessertes Pure Pursuit mit dynamischer Lenkungsregelung für autonome mobile Roboter und Anwendung für sichere Navigation in Chemieanlagen
Roboter, die auf Kurs bleiben
Wenn Roboter aus sauberen Fabrikhallen hinaus in Ackerflächen und Chemieanlagen vordringen, müssen sie engen Wegen mit hoher Präzision folgen. Ein kleines Schwanken kann Pflanzen zerdrücken, Rohrleitungen anstoßen oder in ein Gebiet mit brennbaren Gasen rollen. Dieser Artikel beschreibt eine neue Methode für radgetriebene Roboter, ihre Lenkung und Geschwindigkeit so zu steuern, dass sie sowohl in freien Flächen als auch in beengten Industrieumgebungen nahe an einer geplanten Route bleiben.
Warum es schwierig ist, einen Roboter zu führen
Viele autonome mobile Roboter verwenden heute eine einfache Regel namens „Pure Pursuit“, um einem Pfad zu folgen. Der Roboter schaut einen kurzen Abstand voraus entlang der Route, zielt auf diesen Punkt und wiederholt den Vorgang rasch. In der Praxis müssen Ingenieure entscheiden, wie weit der Roboter „vorausblickt“ und wie schnell er fährt. Ist die Vorausdistanz zu kurz, reagiert der Roboter nervös und kann von einer Seite zur anderen schwanken. Ist sie zu lang, reagiert er zu träge und schneidet Ecken, besonders in engen Kurven oder bei höheren Geschwindigkeiten. Draußen kommt eine weitere Komplikation hinzu: Die Position des Roboters wird aus Satellitensignalen, Bewegungssensoren und Raddrehzahldaten kombiniert, die jeweils eigene Fehler und Verzögerungen aufweisen.
Ein klügerer Weg zu lenken und die Geschwindigkeit zu setzen
Die Autoren schlagen eine verbesserte Methode namens Pure Pursuit mit dynamischer Lenkungsregelung (PP-DSC) vor. Anstatt Vorausdistanz und Geschwindigkeit konstant zu halten, passt der Roboter beides in Echtzeit an, basierend darauf, wie stark er lenkt. Bei kleinen Lenkwinkeln und nahezu geradem Verlauf verwendet der Roboter eine längere Vorausdistanz und höhere Geschwindigkeit für eine glatte, effiziente Fahrt. Mit zunehmendem Lenkwinkel auf Kurven verkürzt sich die Vorausdistanz und die Geschwindigkeit sinkt automatisch, sodass der Roboter mehr Zeit zum Reagieren hat und seitliches Abdriften reduziert wird. Dieses Verhalten wurde an einem vierrädrigen, Pkw-ähnlichen Roboter implementiert, der ein modernes Robotik-Software-Framework sowie hochpräzise Satellitenpositionierung, ein Trägheitssensor und Radsensoren zur Schätzung seiner Bewegung nutzt.

Tests auf Feldern und in virtuellen Chemieanlagen
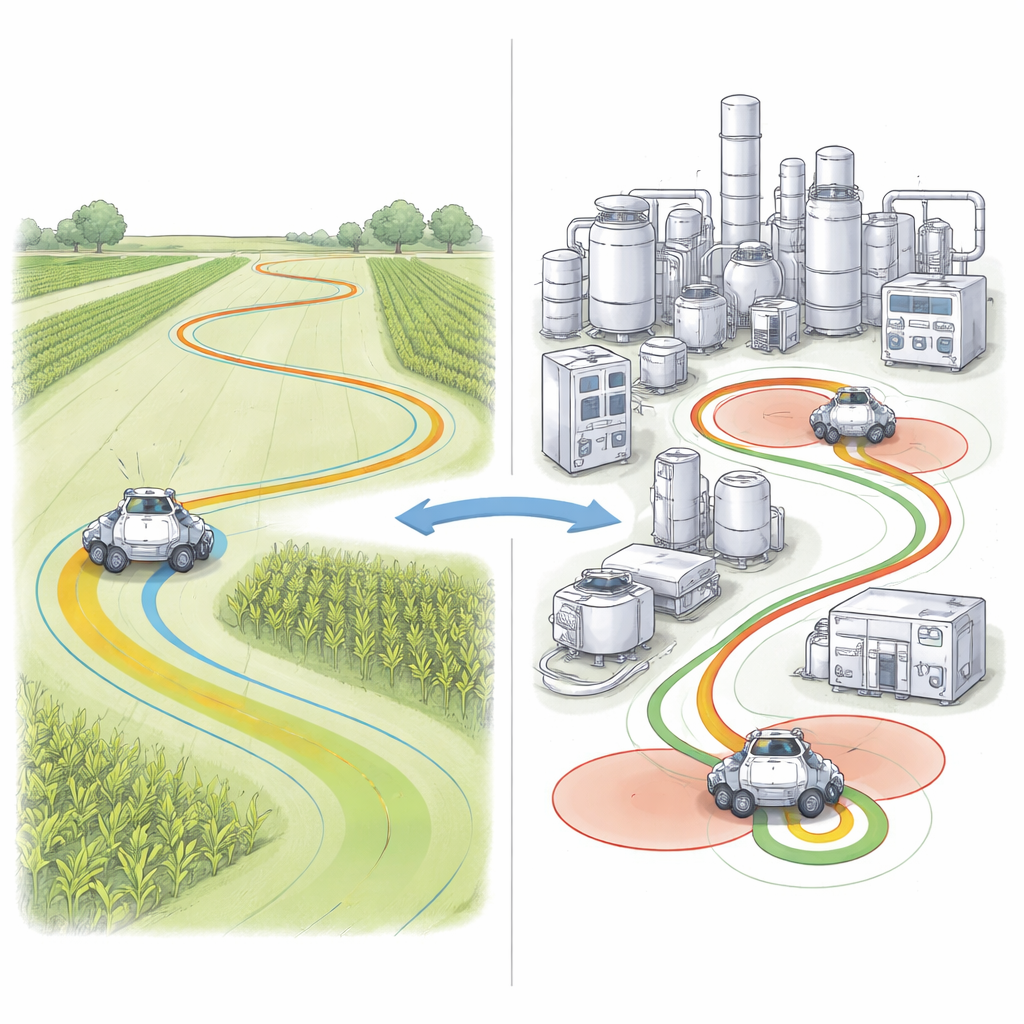
Um die Leistungsfähigkeit von PP-DSC zu prüfen, führte das Team Freilandexperimente auf drei Grundstrecken durch: einer Geraden, einer Runde und einer „Achter“-Strecke, bei Geschwindigkeiten von 1 bis 5 Metern pro Sekunde. Sie verglichen die neue Methode mit dem standardmäßigen Pure Pursuit. Der verbesserte Regler hielt den Roboter in jedem Fall deutlich näher an der geplanten Route. Auf Geraden sank der mittlere Seitfehler auf etwa fünf Zentimeter, und auf gekrümmten Strecken blieb der Fehler unter acht Zentimetern. Im Gegensatz dazu konnte die traditionelle Methode um mehrere zehn Zentimeter abdriften und zeigte größere Ausschläge beim Ein- oder Ausfahren aus Kurven, insbesondere bei höheren Geschwindigkeiten.
Sicherheit in Gefahrenzonen hinzufügen
Die Forscher untersuchten zudem, wie sich ein solcher Roboter in einer Chemieanlage verhalten könnte, wo er mit der Inspektion heißer Reaktoren oder dem Transport von Proben beauftragt werden könnte. Anstatt ein vollständiges industrielles Versuchsfeld zu bauen, nutzten sie ein detailliertes Computermodell einer Biodieselanlage, das die Positionen der Ausrüstung und Zonen mit höherem Brand- und Explosionsrisiko enthielt. Sie erweiterten ihren Regler um einen Sicherheitsfaktor, der den Roboter automatisch verlangsamt, wenn er sich in diesen Gefahrenzonen bewegt, basierend auf einem standardisierten Brand- und Explosionsindex aus der Verfahrenssicherheit. Simulationen zeigten, dass diese sicherheitsbewusste Version von PP-DSC die Verfolgungsgenauigkeit nur geringfügig erhöhte—weniger als ein Prozent im Mittel—während sie sicherstellte, dass der Roboter seine Geschwindigkeit in der Nähe gefährlicher Anlagen reduzierte.
Das richtige Werkzeug für jede Aufgabe wählen
Eine interessante Erkenntnis ist, dass keine einzelne Lenkungsstrategie überall die beste war. In offenen Feldern mit sanften Kurven übertraf die dynamische Methode deutlich den traditionellen Ansatz und hielt die Fahrspur eng und glatt, selbst bei höheren Geschwindigkeiten. In der engen Geometrie einer Chemieanlage hingegen war Pure Pursuit mit festem Vorausblick manchmal besser, besonders auf engen Schleifen und selbstüberschneidenden „Achter“-Strecken, wo die dynamische Vorausdistanz den Roboter versehentlich auf den falschen Zweig des Pfades lenken konnte. Die Autoren schließen daraus, dass Roboter je nach Pfadform zwischen Strategien wechseln sollten: den erweiterten, sicherheitsintegrierten Regler für moderate Kurven und gefahrbewusste Fahrten zu verwenden und bei sehr engen oder verschlungenen Strecken auf ein Fest-Vorausschauen zurückzugreifen. Für Nicht-Expertinnen und Nicht-Experten lautet die Kernbotschaft, dass sichere, verlässliche Roboter-Navigation in realen Anlagen und Feldern nicht nur gute Karten und Sensoren erfordert—eben so wichtig ist, wo der Roboter hinschaut und wie schnell er fährt.
Zitation: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Schlüsselwörter: autonome mobile Roboter, Pfadverfolgung, Lenkungsregelung, GNSS-RTK-Navigation, Sicherheit in Chemieanlagen