Clear Sky Science · de
Leichte Zielerkennung und Mehrzielverfolgung für UAV-Inspektionen in Tagebauen
Klügere Augen im Himmel
Tagebaue sind weitläufige, raue Umgebungen, in denen schwere Lastwagen, Bagger und Menschen sich ständig bewegen. Um Sicherheit und reibungslosen Betrieb zu gewährleisten, sind meist viele Mitarbeitende vor Ort und teure Ortungsgeräte nötig – trotzdem können kleine Schäden und Eindringlinge unbemerkt bleiben. Dieses Papier untersucht, wie leichte, intelligente Drohnen diese Bergwerke aus der Luft patrouillieren können, Ausrüstung, Personen und Probleme in Echtzeit automatisch erkennen und dabei innerhalb der strengen Rechenlimits an Bord arbeiten können.
Warum Bergwerke bessere Wächter brauchen
Moderne Bergwerke verlassen sich bereits auf Hilfsmittel wie Satellitennavigation und spezielle Funkbojen, um Lkw und Maschinen zu verfolgen. Diese „aktiven“ Systeme haben jedoch Schwachstellen: Signale können durch steile Wände, Staub oder Störungen blockiert werden, und sie funktionieren nur für Fahrzeuge und Personen, die die passenden Geräte tragen. Außerdem können sie nicht zeigen, wie ein Schaden tatsächlich aussieht. Drohnen dagegen können schwieriges Gelände überfliegen, reichhaltige Bilder und Video aufnehmen und nicht-kooperative Ziele wie unerlaubt fahrende Fahrzeuge verfolgen. Die Schwierigkeit besteht darin, dass leistungsfähige Bildverarbeitungsalgorithmen normalerweise schwere Rechner benötigen, während Drohnen nur begrenztes Gewicht, Energie und Rechenkapazität haben. Die Autoren zielen darauf ab, ein Erkennungs- und Verfolgungssystem zu entwickeln, das sowohl genau als auch leicht genug ist, um direkt auf einer Drohne zu laufen.
Drohnen beibringen, kleine und verborgene Ziele zu sehen
Kern der Arbeit ist eine weiterentwickelte Version eines verbreiteten Bildmodells namens YOLO, speziell für Tagebaue angepasst. Die Forschenden formen das „Backbone“ des Modells so um, dass es den unregelmäßigen Konturen von Lastwagen, Baggern und Gesteinshaufen folgen kann, statt sich auf starre, gitterartige Filter zu stützen. Sie überarbeiten außerdem den Teil des Netzwerks, der Informationen aus groben und feinen Bildskalen verbindet, sodass winzige, weit entfernte Maschinen und größere nahe Objekte gemeinsam erfasst werden, ohne Verwechslungen. Darüber hinaus fokussiert ein neues, leichtes Entscheidungsmodul die Aufmerksamkeit auf die aussagekräftigsten Details der Szene und hilft dem System, kleine Schadstellen und teilweise verdeckte Maschinen vom unruhigen Hintergrund zu unterscheiden.
Leistungsfähige Modelle auf eine Drohne bringen
Selbst mit diesen Verbesserungen kann ein Bildmodell schnell zu groß für die Drohnenhardware werden. Um das Problem zu lösen, wendet das Team eine sorgfältige Beschneidungsstrategie (Pruning) an, die analysiert, welche internen Verbindungen am meisten zur Leistung beitragen, und den Rest entfernt. Dieser Prozess reduziert die Anzahl der Parameter und den Rechenaufwand, während die stärksten Pfade im Netzwerk erhalten bleiben. Auf einem optimalen Pruning-Level behält das System eine hohe Erkennungsgenauigkeit bei, verkleinert jedoch Modellgröße, Operationen und Antwortzeit genug, um auf einem kompakten Embedded-Prozessor zu laufen, weniger Energie zu verbrauchen und die Flugzeit zu verlängern. Tests an einem eigenen Tagebaudatensatz und an einem öffentlichen Drohnenbenchmark zeigen, dass das beschnittene Modell mehrere bekannte Alternativen übertrifft, insbesondere bei kleinen und teilweise verdeckten Zielen.
Von Einzelaufnahmen zu glatten Bahnen
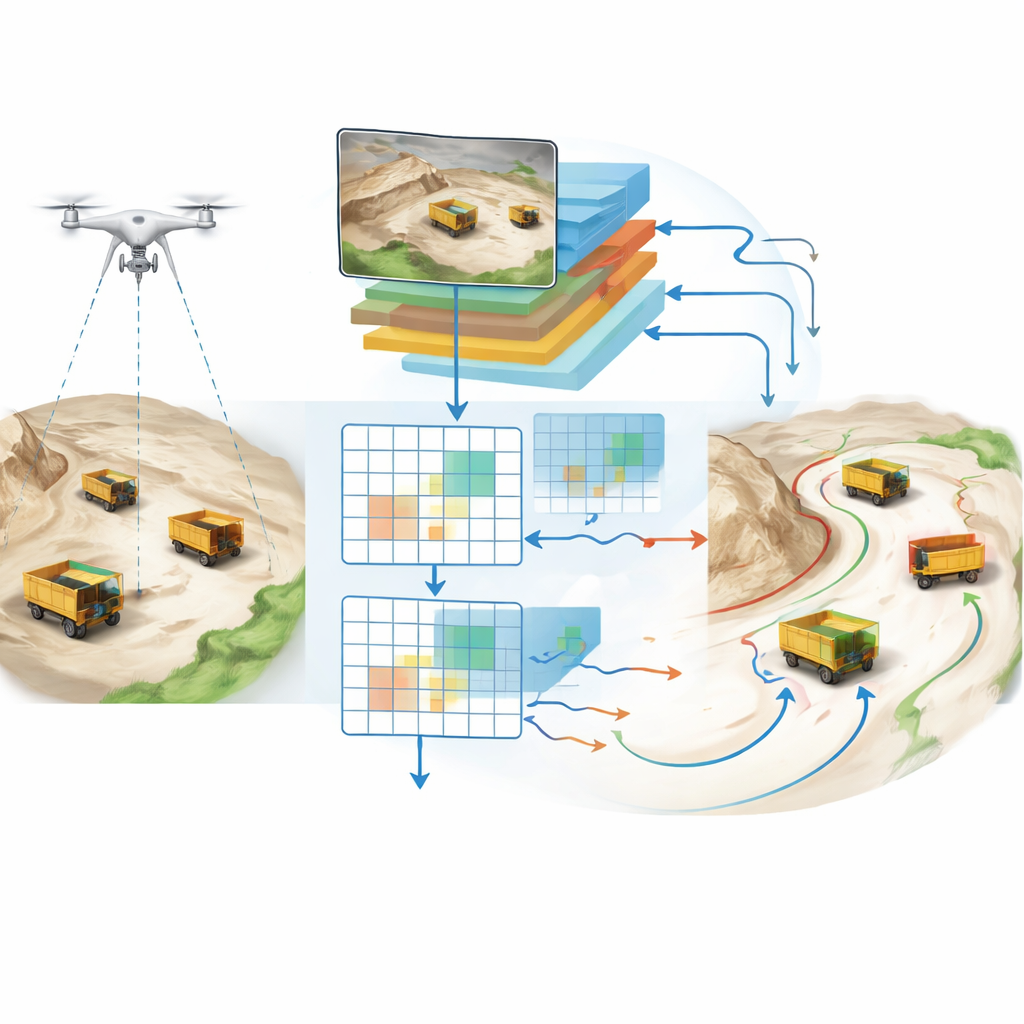
Objekte in einem Bild zu erkennen ist nur die halbe Miete; Bergwerke müssen auch wissen, wie sich jeder Lkw oder jede Person über die Zeit bewegt. Dafür verbessern die Autoren einen bestehenden Ansatz zur Mehrzielverfolgung, sodass er besser mit dichten Szenen, ähnlich aussehenden Fahrzeugen und plötzlichen Bewegungsänderungen zurechtkommt. Sie entwickeln ein kombiniertes Ähnlichkeitsmaß, das berücksichtigt, wo sich ein Ziel befindet, wie es aussieht und sogar, ob es beladen oder leer erscheint. Außerdem korrigieren sie die Bewegungsvorhersagen, um veränderte Beschleunigungen zu berücksichtigen, etwa wenn ein Lkw abbiegt oder einen Hang hochfährt. Zusammen reduzieren diese Schritte Identitätsvertauschungen – also das Verwechseln zweier Fahrzeuge – und halten die Verfolgungslinien glatt und zuverlässig, und das bei ausreichender Geschwindigkeit für den Echtzeitbetrieb auf drohnenfähiger Hardware.
Auf dem Weg zu unbemannten, durchgehenden Patrouillen
Schließlich integrieren die Autoren ihre Erkennungs- und Verfolgungsmodule in ein mehrschichtiges Inspektionssystem, das mehrere Drohnen koordinieren, Daten über 5G- und Ad-hoc-Verbindungen streamen und Ergebnisse an die Bodensteuerung liefern kann. In Experimenten über realen Tagebauen verbessert diese Konfiguration die Genauigkeit und Stabilität der Überwachung von Ausrüstung deutlich im Vergleich zu traditionellen Methoden. Für Nichtfachleute ist die wichtigste Erkenntnis, dass die Studie einen praktischen Weg aufzeigt, kleine, effiziente fliegende Roboter kontinuierlich große Industrieanlagen bewachen zu lassen und dabei kleine Schäden, nicht registrierte Besucher und risikoreiche Situationen zu erkennen, bevor sie eskalieren – ohne sperrige Rechner oder dichte Bojen-Netze an jedem Fahrzeug zu benötigen.
Zitation: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Schlüsselwörter: Drohneninspektion, Tagebau, Objekterkennung, Mehrzielverfolgung, leichte KI-Modelle