Clear Sky Science · de
Ein virtueller-Struktur-basierter Typ-3-Fuzzy-Systemansatz zur prädiktiven Erkennung, Kompensation und Regelung von Sensor- und Aktuatorfehlern in nichtlinearen Systemen
Maschinen im Betrieb halten, wenn Teile versagen
Moderne Technologien — von Industrierobotern bis zu chemischen Anlagen, die den Säuregrad regeln — sind auf Sensoren und Aktuatoren angewiesen, die im Hintergrund alles am Laufen halten. Wenn diese Komponenten jedoch driften, hängen bleiben oder ausfallen, kann ein System viel eher unsicher werden, als es bemerkt wird. Diese Arbeit stellt eine neue Methode vor, die Maschinen erlaubt, solche Probleme selbst zu erkennen und zu korrigieren, selbst wenn Ingenieure kein präzises mathematisches Modell des inneren Systemverhaltens haben.
Warum versteckte Probleme so schwer zu entdecken sind
In vielen realen Situationen ist das Verhalten eines Systems stark nichtlinear: Kleine Änderungen am Eingang können große, unerwartete Ausschläge am Ausgang verursachen. Traditionelle Regelungsverfahren setzen voraus, dass die Gestalter die Gleichungen kennen, die dieses Verhalten beschreiben, und dass Sensoren und Aktuatoren größtenteils wie erwartet arbeiten. In der Praxis altern Bauteile, werden verrauscht oder durch leicht abweichende Hardware ersetzt. Konventionelle fehlertolerante Regler arbeiten entweder mit festen Sicherheitsreserven (passive Methoden) oder sind auf genaue Modelle angewiesen, um Fehler zu erkennen und zu kompensieren (aktive Methoden). Beide Ansätze stoßen an Grenzen, wenn sich das System im Laufe der Zeit ändert oder seine interne Funktionsweise nicht vollständig bekannt ist. Die Autoren vertreten die Auffassung, dass die Industrie Regler braucht, die aus Live-Daten lernen, erkennen, wenn Sensoren oder Aktuatoren fehlverhalten, und diese Fehler in Echtzeit korrigieren, ohne eine detaillierte Systembeschreibung zu benötigen.
Ein lernender Regler, der das System als Blackbox behandelt
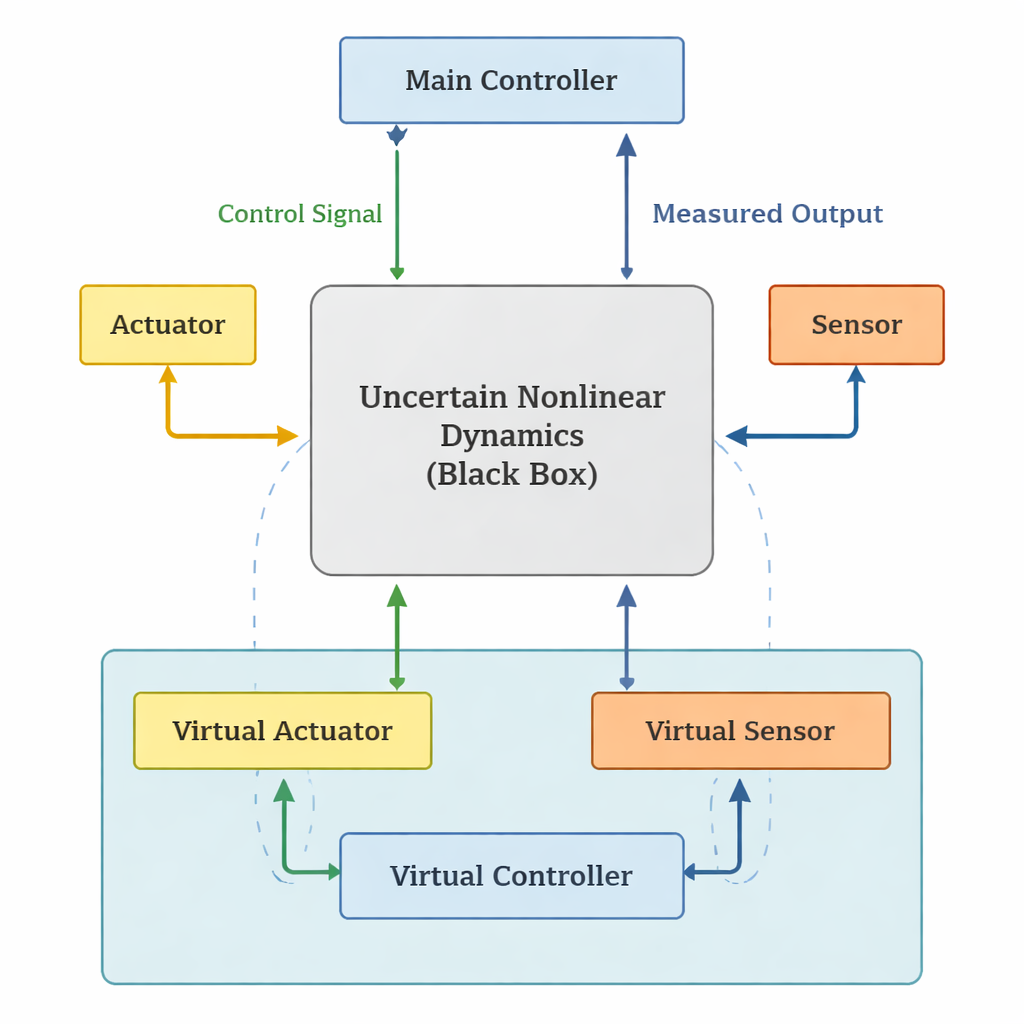
Der vorgeschlagene Rahmen betrachtet die Anlage ausschließlich als Blackbox: Er hat nur Zugang zu den eingespeisten Stellgrößen und den von den Sensoren gemessenen Ausgängen. Im Kern steht ein Typ-3-Fuzzy-Logiksystem, eine erweiterte Form der Fuzzy-Modellierung, die starke Unsicherheit und Messrauschen handhaben kann. Dieses Fuzzy-System lernt online eine kompakte Ein-/Ausgangsbeschreibung der unbekannten Dynamik, während ein modellprädiktiver Regler (MPC) das gelernte Modell nutzt, um über einen kurzen Horizont zukünftige Stellaktionen zu planen. Eine adaptive Stabilisierungseinheit läuft parallel und stellt sicher, dass selbst wenn das Modell unvollkommen ist oder Parameter driften, die kombinierte Rückkopplung die Regelabweichungen beschränkt und schließlich gegen Null treibt.
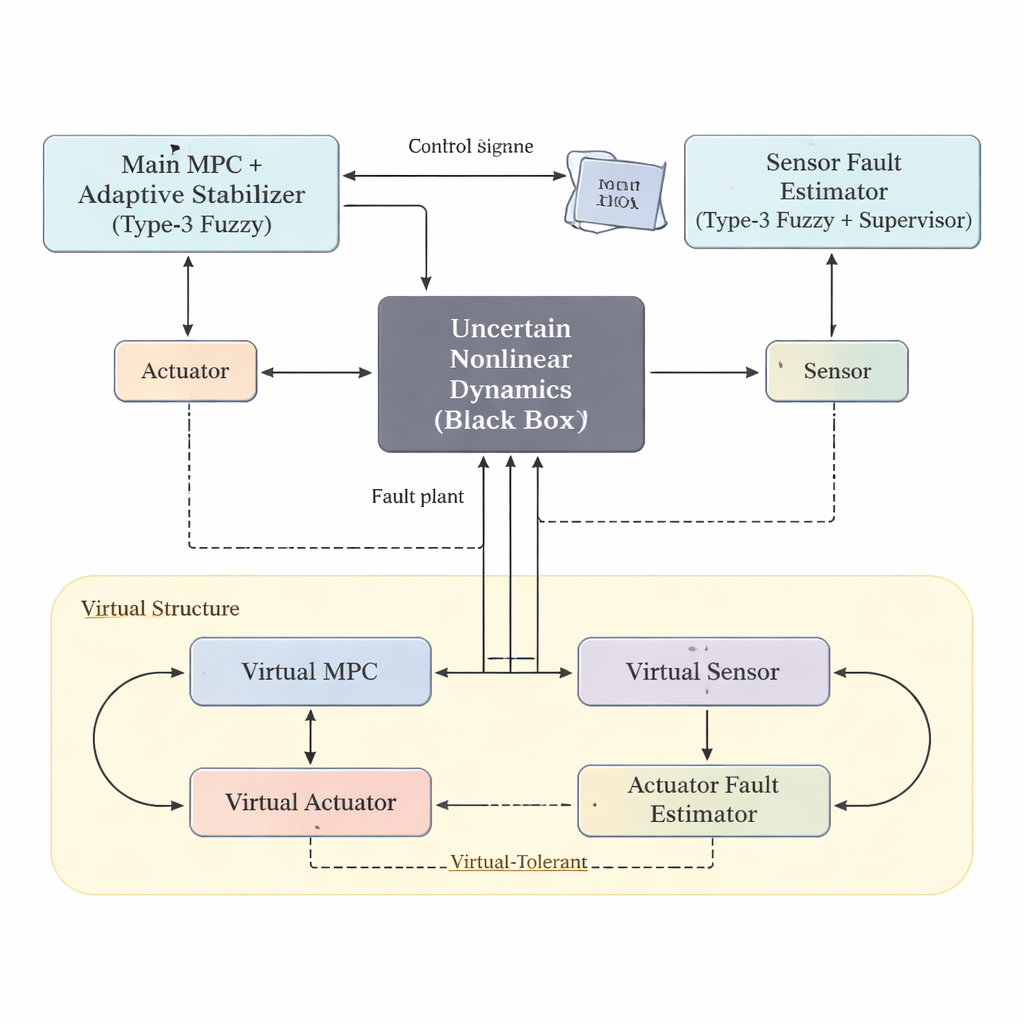
Die Wächter beobachten: Erkennung von Sensor- und Aktuatorfehlern
Der Rahmen teilt die Fehlerbehandlung in zwei koordinierte Teile. Zuerst nutzt eine Sensorfehler-Einheit zwei zusätzliche Typ-3-Fuzzy-Schätzer sowie eine Aufsichtslogik, um abzuschätzen, wie stark eine Sensorablesung von ihrem erwarteten stationären Wert abweicht. Daraus erzeugt sie ein Korrektursignal, das die fehlerhafte Messung sozusagen „gegenkrümmt“, sodass der Hauptregler weiterhin vertrauenswürdige Ausgangswerte sieht. Zweitens wird eine virtuelle Struktur aufgebaut, die das reale System spiegelt: Sie umfasst einen virtuellen Sensor, einen virtuellen Aktuator, einen eigenen Fuzzy-Identifikator und einen virtuellen MPC. Da der virtuelle Regelkreis nicht unter der Verschlechterung des realen Aktuators leidet, offenbaren Unterschiede zwischen dem virtuellen und dem realen Regelpfad das Ausmaß des tatsächlichen Aktuatorversagens. Eine einfache Formel wandelt diese Lücke in eine geschätzte Fehlergröße um, die dann im Hauptstellbefehl kompensiert wird.
Stabilitätsnachweis und Tests an Robotern und Chemietanks
Um zu zeigen, dass der Ansatz nicht nur intuitiv, sondern auch mathematisch fundiert ist, konstruieren die Autoren eine Lyapunov-Funktion — eine Art Energiemaß —, die Regelabweichungen, Modellierungsfehler und die anpassbaren Fuzzy-Parameter einschließt. Sie leiten Anpassungsgesetze für die adaptiven Terme her, sodass diese Energie stets abnimmt, und zeigen damit, dass Fehler über die Zeit schrumpfen, selbst bei Störungen und Fehlern. Anschließend testen Simulationen die Methode an zwei sehr unterschiedlichen Beispielen: einem einkettigen Roboterarm und einem pH-Neutralisationsprozess in einem chemischen Tank. In beiden Fällen werden die wahren Dynamiken als völlig unbekannt behandelt, Parameter variieren, und sowohl Sensor- als auch Aktuatorfehler werden während des Betriebs injiziert. Der Regler hält eine genaue Bahnverfolgung aufrecht, lernt schnell die Größe der Fehler und hält Risiko- und Fehlermetriken niedrig, wobei er einfachere Fuzzy-Regler und andere fortgeschrittene fehlertolerante Verfahren aus der Literatur übertrifft.
Was das für reale Systeme bedeutet
Für Nichtfachleute lautet die Kernaussage, dass diese Methode komplexen Systemen eine Art eingebaute Selbstwahrnehmung verleiht. Anstatt auf ein perfektes Modell oder manuelles Nachjustieren durch Ingenieure zu setzen, lernt der Regler kontinuierlich aus den verfügbaren Daten, bemerkt, wenn Sensoren oder Aktuatoren anfangen zu „lügen“ oder zu schwächeln, und korrigiert automatisch sein Handeln, um die Leistungsfähigkeit stabil zu halten. Da er nur Ein- und Ausgangsdaten benötigt, kann er prinzipiell auf viele verschiedene Maschinen angewendet werden, ohne alles neu entwerfen zu müssen. Obwohl die Ergebnisse auf Simulationen basieren und Hardwaretests noch weiter untersucht werden müssen, deutet die Arbeit auf widerstandsfähigere Roboter, Industrieprozesse und andere autonome Systeme hin, die zuverlässig bleiben, selbst wenn ihre Komponenten und Umgebungen alles andere als ideal sind.
Zitation: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Schlüsselwörter: fehlertolerante Regelung, Fuzzy-Logik, modellprädiktive Regelung, Sensor- und Aktuatorfehler, nichtlineare Systeme