Clear Sky Science · de
Forschung zur Positionierungsmethode beim Paket-Sortieren in unordentlicher Logistik
Warum intelligenteres Paket-Sortieren wichtig ist
Jede Online‑Bestellung, die Sie aufgeben, löst in riesigen Logistikzentren ein verborgenes Ballett aus Kartons aus. Bevor ein Paket auf dem Weg zu Ihrer Haustür beschleunigt, muss es gefunden, aufgehoben, vermessen, gescannt und weitergeleitet werden – oft aus einem chaotischen Haufen gemischter Sendungen. Heute beruht ein großer Teil dieses ersten «Entwirrens» noch auf Menschen, die sich wiederholende, anstrengende Aufgaben erledigen. Diese Arbeit stellt eine neue, auf Vision basierende Methode vor, die Robotern hilft, zuverlässig zu erkennen, wo sie in einem Durcheinander ein Paket greifen sollen, und rückt damit einen Schritt näher an eine vollständig automatisierte, schnellere und weniger arbeitsintensive Paketsortierung.
Von chaotischen Haufen zu roboterfreundlichen Daten
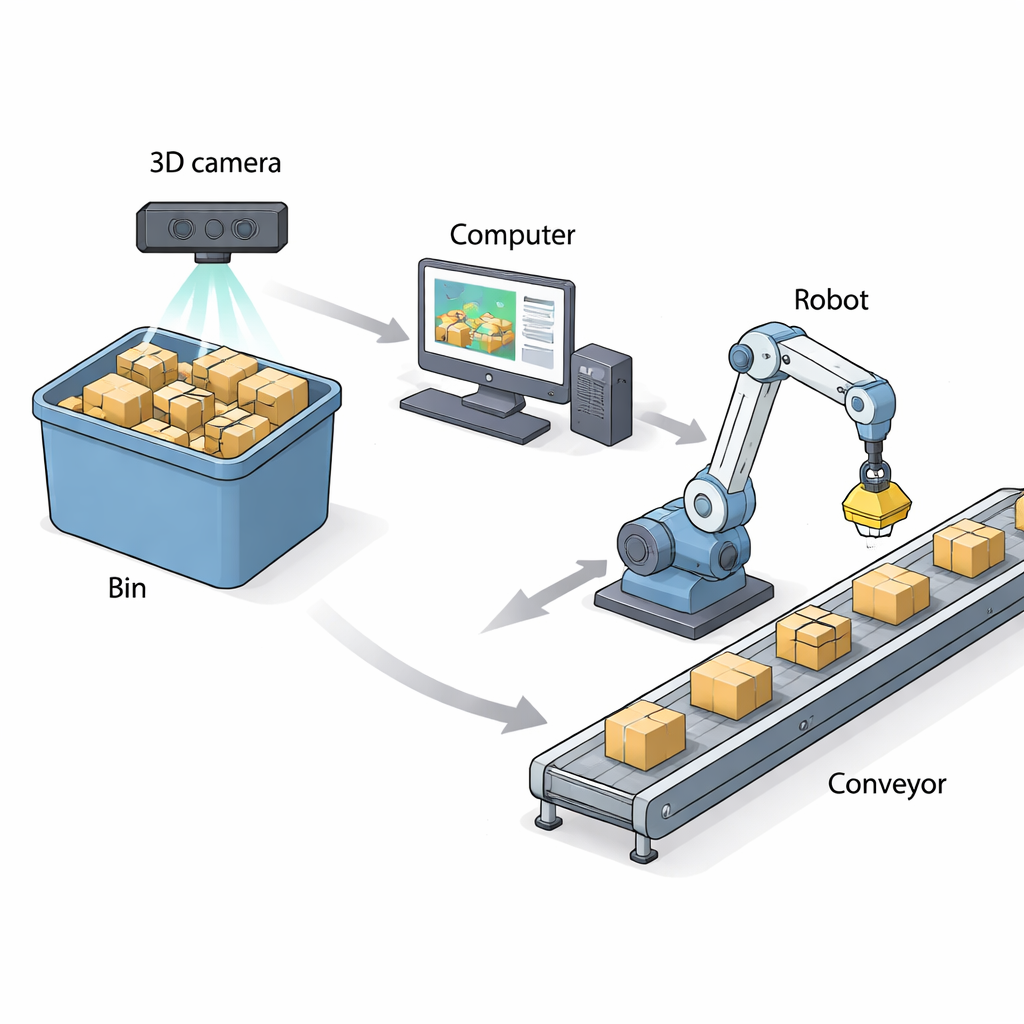
Die Forschenden konzentrieren sich auf das, was sie «unordentliche» Logistiksendungen nennen: Alltagskartons und -umschläge, die ohne Reihenfolge in Behälter geworfen werden, manchmal durch Stapeln gequetscht oder verbogen. Um Menschen in diesem unordentlichen Umfeld zu ersetzen, muss ein Roboter zunächst genau wissen, wo er greifen und wie er seinen Greifer an der Oberfläche des Zielpakets ausrichten soll. Das Team baut ein System um eine 3D‑Kamera herum auf, die sowohl ein Farbbild als auch eine Tiefenkarte der obersten Schicht der Sendungen aufnimmt. Ein modernes Erkennungsnetzwerk (basierend auf YOLOv8) erkennt einzelne Pakete im Farbbild, während die Tiefenkarte deren dreidimensionale Form offenbart. Diese Kombination ermöglicht es dem Rechner, das beste Paket zum Greifen auszuwählen — eines, das nicht zu stark verdeckt ist und weit genug vom Rand des Behälters entfernt liegt — bevor ein genauer Greifpunkt berechnet wird.
Einen stabilen Greifpunkt mit drei Punkten und einem Schatten finden
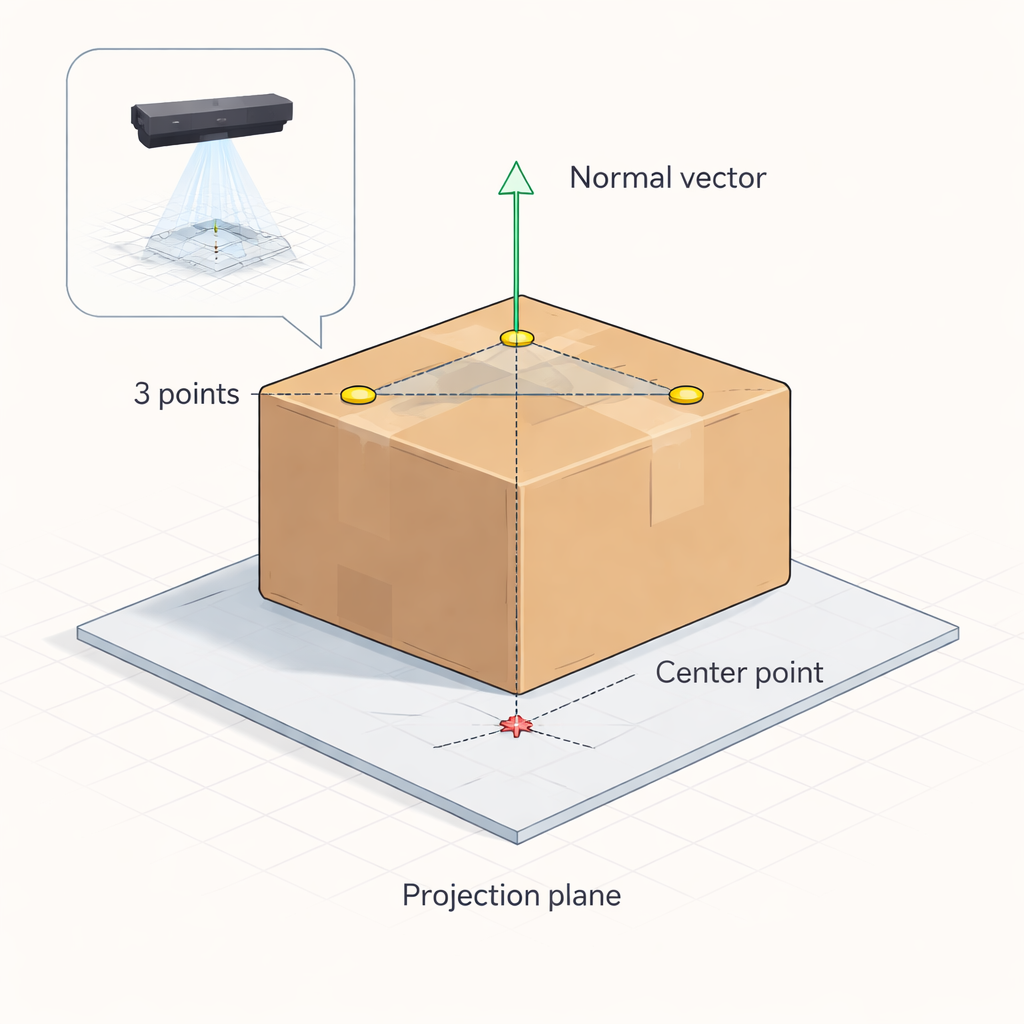
Kern der Methode ist ein geometrischer Trick, den die Autorinnen und Autoren als Drei‑Punkte‑Orientierungs‑Projektionszentrierungs‑Algorithmus bezeichnen. Sobald ein Zielpaket ausgewählt ist, wählt das System zufällig drei Punkte auf dessen Oberseite aus den Tiefendaten. Diese drei Punkte definieren eine Ebene, so wie drei Stifte auf einem Tisch dessen Neigung festlegen. Aus dieser Ebene berechnet der Algorithmus eine Normale — eine gerade Linie, die senkrecht aus der Paketoberfläche herausragt. Parallel dazu verwendet das System die vier oberen Ecken des Pakets im Bild, um das geometrische Zentrum seiner projizierten Kontur zu schließen, ähnlich wie man das Zentrum des Schattens eines Rechtecks findet. Die Kombination aus Ebenenorientierung und dieser Mittelposition ergibt einen präzisen 3D‑Greifpunkt und die Neigung der Paketoberfläche, die anschließend den Sauggreifer oder die Zange des Roboters führen kann.
Umgang mit gequetschten und gewölbten Paketen
Reale Pakete sind keine perfekten Quader: Luftpolsterumschläge hängen durch, weiche Beutel wölben sich und Wellpappkartons können unter Last verziehen. Eine einfache Annahme einer flachen Oberfläche würde hier versagen. Um dem zu begegnen, erweitern die Autorinnen und Autoren ihre Mathematik, um zwischen drei Situationen zu unterscheiden: nahezu flache Pakete, konvexe (wölbende) Oberseiten und konkave (durchhängende) Flächen. Indem das System die höchsten und niedrigsten Tiefenwerte auf der Paketoberfläche vergleicht, entscheidet es zunächst, ob eine nennenswerte Deformation vorliegt. Falls ja, analysiert es, wie die deformierte Oberfläche eine imaginäre Referenzebene schneidet, und passt an dieser Schnittkurve näherungsweise eine Ellipse an. Daraus löst es eine «optimale» Ebene, die am besten eine stabile Greiffläche repräsentiert — selbst wenn die tatsächliche Oberseite durchhängt oder wölbt — und projiziert dann den wesentlichen Greifpunkt zurück auf diese Ebene.
Den Algorithmus auf die Probe stellen
Um zu prüfen, ob die Theorie in der Praxis funktioniert, baute das Team einen Prüfstand mit einem sechsgliedrigen Industrieroboter, einer 3D‑Kamera und einem kundenspezifischen Laser‑und‑Sondiergerät. Zuerst markierten sie das tatsächliche geometrische Zentrum der Oberseite jedes Testpakets und verwendeten zwei Laserstrahlen, um diesen physischen Punkt im Raum zu fixieren. Anschließend ließ das Vision‑System seine eigene Schätzung desselben Zentrums berechnen und befahl dem Roboter, eine zweite Sonde zu diesem berechneten Punkt zu bewegen. Durch Messen des winzigen Versatzes zwischen den beiden Sondenspitzen konnte der Positionierfehler berechnet werden. Tests mit starren Holzmodellkartons und realistischen Verpackungsmaterialien — Wellpappkartons, Luftpolsterumschläge und Plastiktüten in Größen bis zu 250×250 mm — zeigten einen maximalen Positionierfehler von etwa 1,7 Millimetern und durchschnittliche Fehler nahe 1 Millimeter pro Achse. Die vollständige Berechnung für jedes Paket dauerte rund 17,5 Millisekunden, schnell genug für hochdurchsatzfähige Sortierlinien.
Was das für künftige Lager bedeutet
Kurz gesagt zeigt die Studie, dass ein Roboter, ausgestattet mit einer 3D‑Kamera und diesem Drei‑Punkte‑Projektionsalgorithmus, zuverlässig ermitteln kann, wo und wie Pakete aus einem chaotischen Behälter mit Millimeter‑Genauigkeit zu greifen sind. Während starke Verformungen bei sehr weichen Sendungen die Genauigkeit etwas verringern, bleibt die Methode robust genug für realistische Lagerbedingungen. Da die Paketmengen weiter steigen und Arbeitskräfte knapp bleiben, könnten solche Algorithmen dazu beitragen, die schwersten und monotonsten Sortieraufgaben von Menschen auf Maschinen zu verlagern — und so sicherere, weniger eintönige Arbeit zu ermöglichen und gleichzeitig das wachsende Geschäft des E‑Commerce reibungslos am Laufen zu halten.
Zitation: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Schlüsselwörter: 3D‑Vision, Paket‑Sortierung, robotisches Greifen, Logistik‑Automatisierung, Objektlokalisierung