Clear Sky Science · de
Umkonfigurierbare Analyse und Arbeitsraumoptimierung eines modularen, kabelaufgehängten Parallelroboters
Roboter, die auf unsichtbaren Schienen fahren
Stellen Sie sich einen Roboter vor, der eine schwere Kamera durch ein Stadion gleiten lässt, Baumaterial über eine Baustelle hebt oder ein Rehabilitationsgerät um einen Patienten führt — und das alles, während er an Kabeln hängt statt auf starren Armen zu fahren. Dieses Papier stellt eine neue Art von kabelaufgehängtem Roboter vor, dessen Struktur bei Bedarf umgestaltet werden kann, sodass eine Maschine sich an viele verschiedene Aufgaben anpasst und die nützlichsten Bewegungen aus ihrem Arbeitsraum herauskitzelt.
Ein Roboter aus austauschbaren Bauteilen
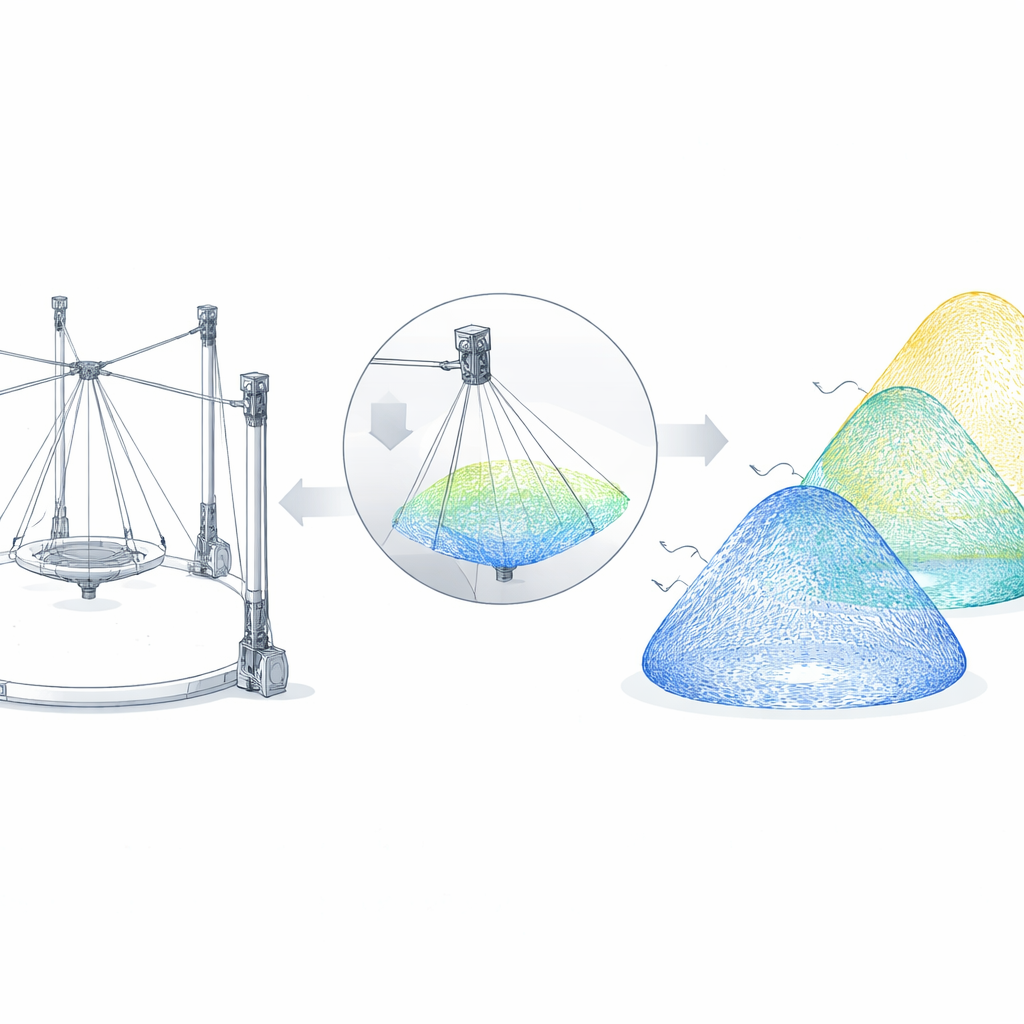
Im Mittelpunkt der Studie steht ein modularer, kabelaufgehängter Parallelroboter (MCSPR). Statt fester Metallarme verwendet er bis zu sechs identische „Zweige“, jeder ein Turm mit Motoren, Umlenkrollen und einem Seil, das mit einer zentralen beweglichen Plattform, dem Endeffektor, verbunden ist. Diese Zweige sitzen entlang einer Kreisführung und können hinzugefügt, entfernt, gedreht oder in der Höhe verstellt werden. Durch Umordnen können dieselben Komponenten sich wie verschiedene Roboter verhalten: mit zwei Zweigen bewegt er sich in einer Ebene, mit drei oder vier bewegt er sich frei im Raum, und mit fünf oder sechs kann die Plattform zusätzlich in mehreren Richtungen kippen und rotieren.

Die Skelettplanung einer Formwandler‑Maschine
Ein so flexibles System zu entwerfen ist nicht nur eine Frage des Zusammenbaus von Teilen. Die Autoren verwenden einen systematischen Ansatz der „Struktursynthese“ und behandeln jedes Kabel, jede Umlenkrolle und jedes Gelenk als grundlegenden Baustein in einem Netzwerk. Mit graphähnlichen Diagrammen legen sie dar, wie diese Elemente verbunden sind, damit die Plattform die gewünschten Freiheitsgrade erhält — etwa das Gleiten entlang dreier Achsen oder das Rotieren um diese Achsen. Dieser Katalog von Modulen und Verbindungen dient als Design‑Werkzeugkasten: Je nach den für eine Aufgabe benötigten Bewegungen kann ein Entwickler wählen, wie viele Zweige verwendet und wo sie auf der Kreisführung platziert werden, mit der Gewissheit, dass die resultierende Struktur wie beabsichtigt funktioniert.
Vorhersagen, wohin sich die Plattform bewegt
Weil die Plattform an Seilen hängt, die nur Zugkräfte ausüben können, nicht Druck, ist die Vorhersage ihrer Bewegung komplizierter als bei herkömmlichen Robotern. Das Team entwickelt eine einheitliche mathematische Beschreibung, die für alle fünf Hauptkonfigurationen des MCSPR gilt. Für eine gewünschte Position und Orientierung der Plattform berechnen sie exakt, wie lang jedes Seil sein muss und wie schnell sich dessen Länge ändern sollte. Anschließend bauen sie einen physischen Prototyp und steuern die Plattform so, dass sie einen geschmeidigen Spiralpfad im Raum nachfährt. Sensoren entlang der Seile zeichnen die tatsächlichen Bewegungen auf, die gut mit den Vorhersagen übereinstimmen. Das bestätigt, dass das Modell den Roboter zuverlässig steuern kann, selbst wenn dessen Geometrie umkonfiguriert wird.
Ermitteln, wo der Roboter sicher stillhalten kann
Ebenso wichtig ist das Verständnis dafür, wo die aufgehängte Plattform im Gleichgewicht bleiben kann. Wenn ein Seil durchhängt, ist die Kontrolle verloren. Die Autoren konzentrieren sich auf den sogenannten statischen Gleichgewichtsarbeitsraum: die Raumregion, in der alle Seile unter positiver Vorspannung bleiben können, während nur die Schwerkraft auf die Plattform wirkt. Mit einem Monte‑Carlo‑Ansatz sampeln sie zufällig viele mögliche Positionen und Orientierungen der Plattform und prüfen für jede Pose, ob die zur Halten benötigten Seilspannungen alle innerhalb sicherer Grenzen liegen. Die akzeptierten Stichproben bilden eine dreidimensionale Wolke, die das verfügbare Arbeitsvolumen des Roboters umreißt.
Die Reichweite des Roboters durch intelligente Anpassung erweitern
Da die Zweige des MCSPR in Höhe und Winkel veränderbar sind und die Plattform Lasten unterschiedlicher Masse und Kippwinkel tragen kann, sind Größe und Form dieses sicheren Volumens nicht festgelegt. Die Forscher variieren diese Faktoren systematisch in einer Sechs‑Zweig‑Konfiguration. Sie zeigen, dass eine schwerere Nutzlast die Region, in der der Roboter still stehen kann, drastisch verkleinert, während geschickte Wahl von Zweighöhen und Winkelabständen sie vergrößern kann. Anschließend formulieren sie ein Optimierungsproblem: Passen Sie Nutzlast, Zweighöhen, Zweigwinkel und Plattformneigungsbereich so an, dass das Volumen des sicheren Arbeitsraums maximiert wird. Bei der Durchführung dieser Suche in Software finden sie eine Konfiguration, in der der erreichbare, ausgeglichene Raum mehrere Male größer ist als bei einem naiven Layout.
Warum das für reale Aufgaben wichtig ist
Für Nicht‑Spezialisten lautet die Kernbotschaft: Dieser Roboter lässt sich fast wie ein Baukastensystem umformen und lässt sich dennoch präzise analysieren und abstimmen. Durch die Kombination modularer Hardware mit sorgfältiger mathematischer Planung und computerbasierter Suche verwandeln die Autoren eine einzelne kabelaufgehängte Maschine in eine vielseitige Plattform, die an viele Aufgaben anpassbar ist — von der Präzisionsfertigung bis zur Rehabilitation — und dabei ihren Arbeitsraum optimal nutzt und Lasten sicher trägt.
Zitation: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Schlüsselwörter: Kabelroboter, modulare Robotik, umkonfigurierbare Mechanismen, Roboterarbeitsraum, parallele Manipulatoren