Clear Sky Science · de
Dynamische qualitätsbewusste Pfadplanung für 6-DoF-Industrieroboterarme mittels BiRRT und metaheuristischer Optimierung basierend auf B-Spline-Pfaden
Roboter, die sich glatt und sicher bewegen
Industrieroboter teilen heute beengte Arbeitsbereiche mit Menschen, Werkzeugen und Fördersystemen. In diesen engen Umgebungen kann ein Roboterarm nicht einfach von Punkt A nach Punkt B fahren; er muss das ohne Kollisionen, mit geringem Energieverbrauch und ohne so stark zu vibrieren, dass er sich selbst oder benachbarte Anlagen beschädigt. Dieses Papier beschreibt eine praktische Methode, solche sorgfältigen Bewegungen für einen typischen sechsachsigen Industrieroboterarm zu planen und grobe, rechnerisch gefundene Pfade in glatte, energiebewusste Bewegungen umzuwandeln, die sicher auf realer Fabrikhardware ausgeführt werden können.
Warum das Planen einer einfachen Greifbewegung überraschend schwer ist
Wenn sich ein Roboterarm bewegt, müssen viele Anforderungen gleichzeitig ausbalanciert werden. Der Pfad sollte kurz sein, damit Aufgaben schnell erledigt werden; der Energieeinsatz sollte gering sein, um Wärme und Verschleiß zu begrenzen; und die Bewegung sollte sanft sein, damit der Arm nicht ruckt oder vibriert. Klassische Ansätze legen glatte mathematische Kurven (wie Splines) durch einige wenige manuell gewählte Wegpunkte, was im freien Raum gut funktioniert, in beengten Zellen jedoch ineffizient oder sogar unsicher werden kann. Neuere Stichprobenverfahren wie Rapidly Exploring Random Trees (RRT) eignen sich gut, um sich durch komplexe Hindernisfelder zu schlängeln, neigen jedoch zu Pfaden mit scharfen Knicken, die Motoren und Getriebe stark belasten. Die Autorinnen und Autoren argumentieren, dass keine dieser Methoden allein ausreicht; stattdessen kombinieren sie beide in einem zweistufigen Rahmenwerk.
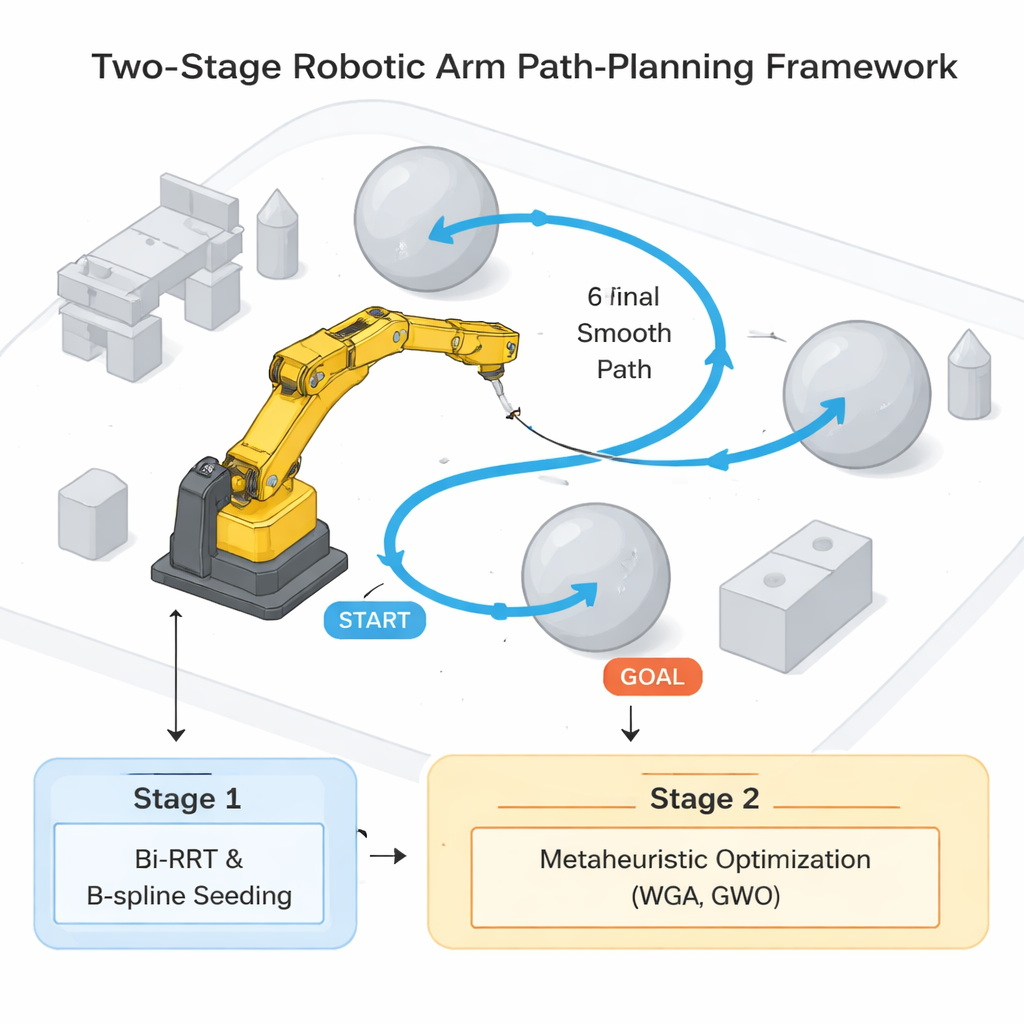
Eine zweistufige Roadmap für Roboterbewegungen
Im ersten Stadium baut das Team eine sichere "Referenzroute" im Gelenkraum des Roboters auf, statt nur die Handposition im Raum zu betrachten. Sie beginnen mit einer glatten B-Spline-Kurve, die Start- und Zielposition verbindet und kugelförmige Hindernisse mit einem Sicherheitsabstand umgeht. Diese Kurve leitet dann einen bidirektionalen RRT (Bi-RRT)-Planer, der zwei zufällige Bäume – vom Start und vom Ziel – wachsen lässt, bis sie sich in einem kollisionsfreien Pfad treffen. Dabei wird jede vorläufige Bewegung des gesamten Arms gegen vereinfachte Hindernisformen geprüft. Sobald ein Pfad gefunden ist, werden überflüssige Knicke durch "Short-Cutting" beschnitten und das Ergebnis als zeitparametrisierter Spline neu dargestellt, dem der Roboter im Prinzip folgen könnte.
Den Roboter zu sanfteren Bewegungen befähigen
Die zweite Stufe nimmt diesen machbaren, aber imperfekten Pfad und optimiert ihn hinsichtlich Qualität. Hier verwenden die Autorinnen und Autoren zwei von der Natur inspirierte Optimierungsverfahren: einen hybriden Whale–Genetic Algorithm (WGA) und den Grey Wolf Optimizer (GWO). Beide wirken auf eine begrenzte Menge an Kontrollpunkten und Zeitparametern entlang des ursprünglichen Splines, dürfen diese Punkte jedoch nur innerhalb vorab berechneter sicherer Korridore um den Pfad verschieben. Jede Kandidatenbewegung wird anhand einer kombinierten Einzelbewertung beurteilt, die drei Bestandteile mischt: wie weit die Roboterhand reist, wie viel Energie auf Gelenkebene verbraucht wird (basierend auf den Eigenschaften der einzelnen Motoren) und wie "ruckig" die Gelenke sind — wie schnell sich ihre Beschleunigungen über die Zeit ändern. Durch wiederholtes Vorschlagen, Testen und Verbessern von Kandidatenpfaden suchen diese Optimierer nach Bewegungen, die weiterhin kollisionsfrei sind, aber deutlich glatter und besser ausführbar.
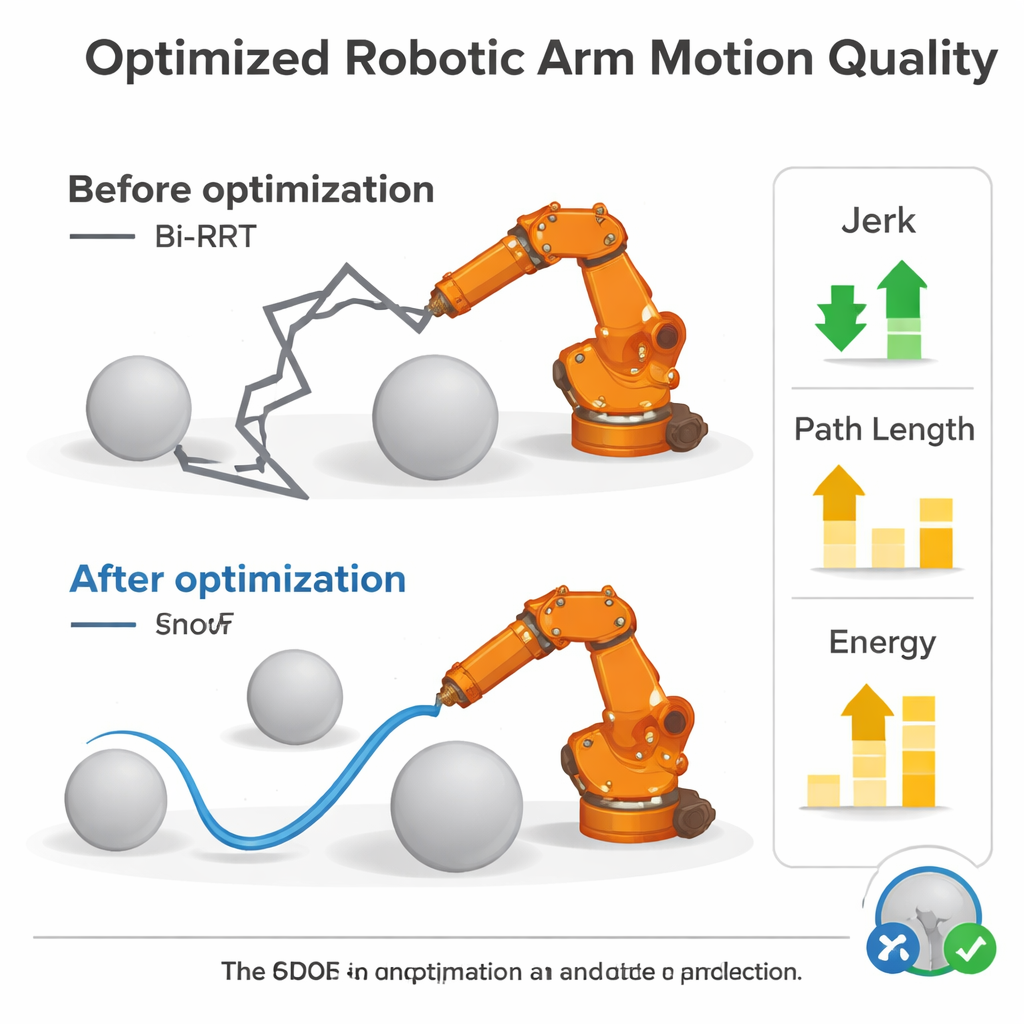
Was die Simulationen zeigen
Die Autorinnen und Autoren testen ihre Pipeline an einem digitalen Modell eines weit verbreiteten Industrieroboters, des KUKA KR 4 R600, der sich in einer Szene mit drei Hindernissen über eine feste Zwei-Sekunden-Bewegung bewegt. Eine rein spline-basierte Lösung ist bereits einigermaßen glatt, nutzt jedoch nicht systematisch alle möglichen sicheren Routen aus. Ein Bi-RRT mit Short-Cutting findet einen Pfad ähnlicher geometrischer Länge und sogar mit geringerem Energieeinsatz, hat jedoch einen wesentlichen Nachteil: sein Ruck-Index — ein Indikator dafür, wie abrupt sich die Gelenkbeschleunigungen ändern — ist etwa zehnmal höher, was auf eine Bewegung hindeutet, die in einer realen Maschine Vibrationen und Belastungen auslösen würde. Nach Anwendung von WGA oder GWO wird der Ruck um ungefähr 94–96 Prozent gegenüber diesem rohen Bi-RRT-Pfad reduziert. Diese dramatische Glättung geht einher mit nur moderaten Zuwächsen in Reiseweite (etwa 15–17 Prozent) und Energie (etwa Faktor zwei), ein Kompromiss, den die Autorinnen und Autoren als lohnenswert für reale Anlagen bewerten.
Von der Theorie zur Fertigungshalle
Für Nicht-Spezialisten ist die Kernbotschaft, dass die Autorinnen und Autoren ein konkretes Rezept — und MATLAB-basierte Werkzeuge — liefern, um die erste, grobe Idee eines Roboters für eine Bewegung in eine ausgereifte, hardwarefreundliche Bewegung zu verwandeln. Ihr Ansatz garantiert zunächst, dass ein Pfad durch eine beengte Umgebung existiert, und formt diesen Pfad dann so um, dass der Arm mit weniger Stößen fährt und dabei weiterhin alle Gelenkgrenzen und Sicherheitsabstände respektiert. Das Endergebnis ist eine Familie von Bewegungen, die ein realer Industrieroboter sicherer und zuverlässiger ausführen kann und die die Grundlage für künftige Erweiterungen legt, in denen Roboter Arbeitsbereiche mit Menschen teilen und ihre Bewegungen in Echtzeit mithilfe von Kameras oder sogar Gehirnsignal-Schnittstellen anpassen.
Zitation: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Schlüsselwörter: Roboterpfadplanung, industrieller Roboterarm, Kollisionsvermeidung, Bewegungsglätte, metaheuristische Optimierung