Clear Sky Science · de
Ganganpassungen bei walker‑unterstützter Fortbewegung älterer Menschen: eine Hauptkomponentenanalyse spatiotemporaler und kinematischer Parameter
Warum das Gehen mit einem intelligenten Gehwagen wichtig ist
Mit zunehmendem Alter wird Gehen häufig langsamer und unsicherer, was das Risiko für Stürze, Knochenbrüche und den Verlust der Selbstständigkeit erhöht. Viele Senioren nutzen Gehhilfen, um mobil zu bleiben, doch diese Geräte können auch subtil beeinflussen, wie sich Menschen bewegen – teilweise auf Weise, die noch nicht vollständig verstanden sind. Diese Studie untersucht, wie ein hochentwickelter „intelligenter Gehwagen“ das Gangbild gesunder älterer Erwachsener verändert. Mithilfe detaillierter Bewegungsmessungen und fortgeschrittener Statistik werden dabei Effekte getrennt, die dem Alter zuzuschreiben sind, von solchen, die durch das Gerät selbst verursacht werden.
Wie Altern und Gehhilfen zusammenhängen
Stürze sind ein großes Gesundheitsproblem im höheren Alter: Etwa ein Drittel der über 65‑Jährigen stürzt mindestens einmal pro Jahr. Um dieses Risiko zu senken, verschreiben Ärztinnen und Ärzte häufig Gehhilfen. Doch konventionelle Gehhilfen können schwer zu handhaben sein und bei falscher Nutzung die Instabilität sogar verstärken. Ingenieurinnen und Ingenieure entwickeln daher intelligente Gehwagen mit Sensoren, Antrieben und Regelungssystemen, die sanftere Unterstützung und Führung bieten sollen. Bevor solche Geräte breit für Patientinnen und Patienten mit Erkrankungen wie Schlaganfall oder Parkinson eingesetzt werden, müssen Forscherinnen und Forscher verstehen, wie sie das Gehen bei sonst gesunden älteren Menschen verändern. Dieses „saubere“ Bild dient als Referenz, um später zu erkennen, ob Patientinnen und Patienten sich verbessern, kompensieren oder neue, potenziell ungünstige Bewegungsgewohnheiten entwickeln.
Ein genauerer Blick auf walker‑unterstütztes Gehen
Das Team untersuchte 14 ältere Freiwillige Mitte 60 ohne Gehbeeinträchtigungen. Jede Person absolvierte zwei einfache 10‑Meter‑Gänge: einen ohne Hilfsmittel und einen mit einem intelligenten Gehwagen namens UFES vWalker. Dieser robotische Gehwagen verfügt über Kraftsensoren, Laserscanner und softwaregesteuerte Räder, die die Schubkraft des Nutzers in eine sichere maximale Geschwindigkeit von 0,4 Metern pro Sekunde umsetzen. Während des Gehens zeichnete ein tragbares Motion‑Capture‑System mit kleinen Sensoren am Becken, an Oberschenkeln, Schienbeinen und Füßen auf, wie schnell die Teilnehmenden gingen, wie lange jeder Schritt dauerte, wie breit die Schritte waren und wie sich Hüft-, Knie‑ und Sprunggelenke im Gangzyklus bewegten.
Was sich beim Einsatz des Gehwagens änderte
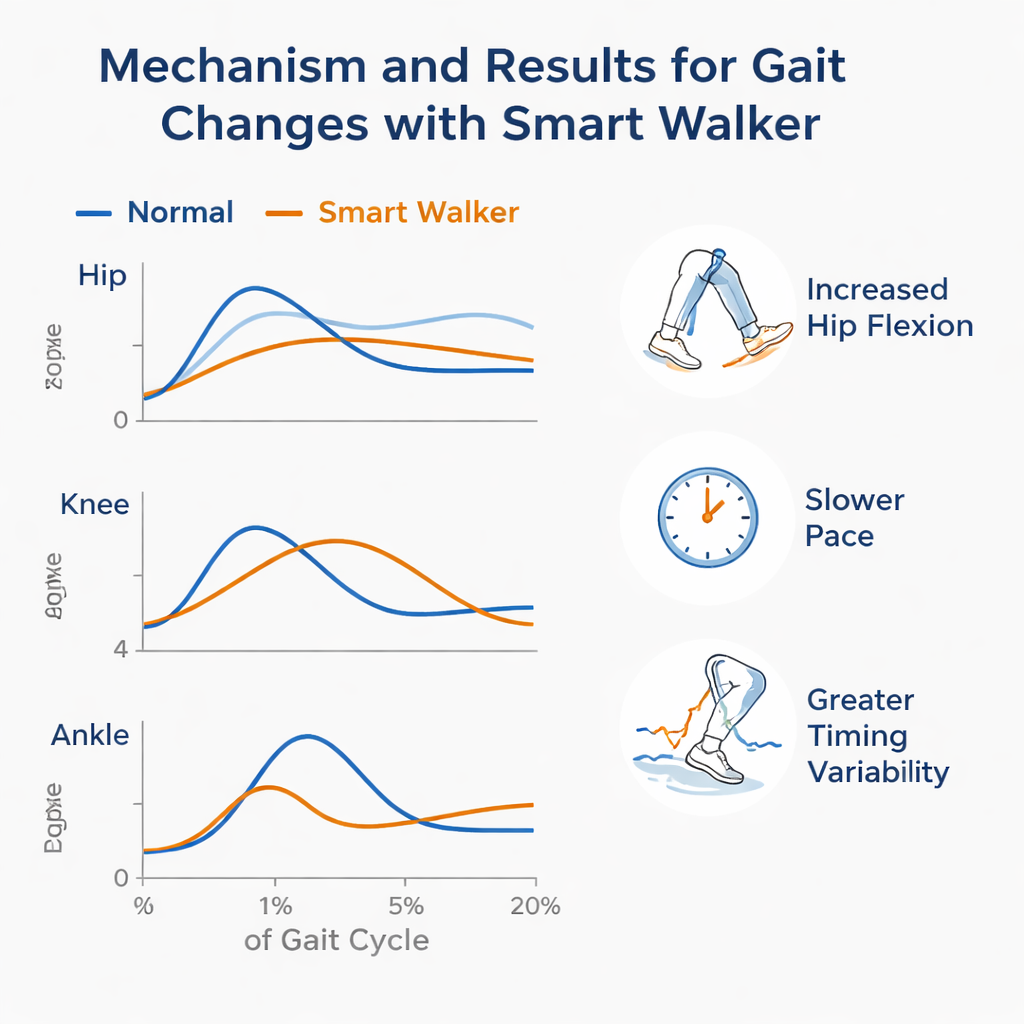
Beim Gehen mit dem intelligenten Gehwagen bewegten sich die Teilnehmenden langsamer, machten kürzere und etwas schmalere Schritte und verbrachten mehr Zeit mit beiden Füßen am Boden. Die zeitliche Abfolge von Schritten wurde variabler. Auch die Gelenkwinkel veränderten sich: Die Hüften blieben während des gesamten Gangs in einer stärker gebeugten, nach vorn geneigten Haltung, während die Knie während der Schwungphase tendenziell weniger beugten. Viele Bewegungen von Knöchel und Hüfte nahmen zu und spiegelten die nach vorn geneigte Körperhaltung wider, die nötig war, um die Unterarmauflagen des Gehwagens zu halten. Diese Verschiebungen waren nicht zufällig. Mithilfe einer statistischen Methode namens Hauptkomponentenanalyse gruppierten die Forschenden verwandte Messgrößen in breitere „Domänen“ wie Tempo, Rhythmus, Symmetrie, Stützbasis und Gelenkbewegung. Beim normalen Gehen zeigten sich klare Domänen, ähnlich wie in früheren Altersstudien, doch das walker‑unterstützte Gehen erzeugte ein anderes Muster, einschließlich neuer Domänen, die speziell mit dem Beinaufschwung und der Schritterzeugung zusammenhängen, wenn das Körpergewicht teilweise vom Gerät getragen wird.
Verborgene Muster im Gangbild
Durch die Kombination standardmäßiger Schritt‑Messgrößen mit Gelenkbewegungsdaten offenbarte die Analyse, wie verschiedene Aspekte des Gehens koordiniert sind. Beim normalen Gehen bildeten Tempo und Variabilität eine zentrale Domäne, während Rhythmus, Symmetrie und Stützbasis andere Domänen bildeten; das Hinzunehmen von Gelenkwinkeln differenzierte spezifische Bewegungsmuster für Hüfte, Knie und Sprunggelenk. Beim Einsatz des intelligenten Gehwagens allerdings wurden Knie‑ und Sprunggelenksbewegungen in der frühen Standphase eng mit der Gehgeschwindigkeit verknüpft, während Hüft‑ und Kniebewegungen während des Schwungs mit Unterschieden zwischen linker und rechter Seite zusammenhingen. Eine weitere neue Domäne, genannt Schrittdynamik, fasste zusammen, wie Schrittlänge, zeitliche Unterschiede und der Abstoß des Sprunggelenks interagierten, wenn der Gehwagen involviert war. Diese gerätespezifischen Domänen deuten darauf hin, dass der intelligente Gehwagen mehr tut, als den Nutzenden nur zu stabilisieren – er gestaltet aktiv die Koordination der Beine bei der Schritterzeugung um.
Was das für sicheres Gehen im Alter bedeutet
Für Nicht‑Spezialistinnen und Nicht‑Spezialisten ist die zentrale Botschaft: Intelligente Gehwagen können das Gehen langsamer und kontrollierter machen, fördern jedoch auch eine nach vorn gebeugte Haltung und ein anderes Muster der Schrittzeitung und Beinbewegung als beim normalen Gehen. Diese gerätebedingten Veränderungen sind nicht zwangsläufig negativ; kurzfristig können sie Menschen ein größeres Sicherheitsgefühl geben. Wenn Rehabilitationsprogramme jedoch zu lange ausschließlich auf einen intelligenten Gehwagen setzen, ohne sorgfältig anzupassen, könnten Nutzende eine schwer wieder abzulehrende Gangart erlernen. Die Autorinnen und Autoren plädieren dafür, dass Therapeutinnen, Therapeuten und Designer diese Ergebnisse nutzen, um Unterstützungsniveau, Griffhöhe und Trainingsziele so abzustimmen, dass intelligente Gehwagen als Zwischenschritt zu sichererem, natürlicherem Gehen dienen – und nicht als dauerhafte Krücke, die neue, weniger effiziente Gewohnheiten festigt.
Zitation: Elias, A., Loureiro, M., Machado, F. et al. Gait adaptations to walker-assisted locomotion in elderly: a principal component analysis of spatiotemporal and kinematic parameters. Sci Rep 16, 6872 (2026). https://doi.org/10.1038/s41598-026-37448-4
Schlüsselwörter: intelligenter Gehwagen, Gang älterer Menschen, Sturzprävention, Rehabilitationsrobotik, tragbare Bewegungssensoren