Clear Sky Science · de
Sichere Formationsskalierung und Bewegungsplanung für heterogene UAV–UGV-Teams in engen Umgebungen
Roboter, die in der Luft und am Boden zusammenarbeiten
Stellen Sie sich einen Schwarm kleiner Flugdrohnen vor, die über einer Katastrophenstelle Ausschau halten, während robuste Geländefahrzeuge darunter durch Trümmer schlängeln — alle bewegen sich als ein koordiniertes Team. Dieses Papier untersucht, wie man solche gemischten Roboterguppen in engen, hindernisreichen Bereichen zusammenhält, ohne Zusammenstöße oder hektische Umplanungen. Die Autoren schlagen einen neuen Ansatz vor, mit dem Luft- und Bodenroboter eine stabile Formation teilen, durch enge Lücken passen und trotzdem schnell und sicher ihr Ziel erreichen.
Warum die Koordination gemischter Robot Teams schwierig ist
Fliegende Drohnen und bodengebundene Fahrzeuge verhalten sich sehr unterschiedlich. Drohnen bewegen sich in drei Dimensionen und werden leicht durch Wind abgelenkt. Bodenfahrzeuge müssen Wendebeschränkungen beachten und mit rauem Gelände zurechtkommen. Dennoch würden viele reale Einsätze — von Suche und Rettung bis zu Inspektionen — davon profitieren, wenn diese Roboter als eine einzige, dreidimensionale Gruppe reisen könnten. Bestehende Methoden behandeln oft Formationshaltung und Hindernisvermeidung als getrennte Probleme. Wenn die Umgebung eng wird, zerfällt die Formation typischerweise und muss später wieder zusammengeführt werden, was Zeit kostet und das Kollisionsrisiko erhöht.
Ein neuer Weg, die Gruppe zusammenzuhalten
Um dem zu begegnen, entwerfen die Autoren ein Framework, das sie RG–ASAPF nennen und das die Formgebung der Gruppe eng mit ihrer Bewegungssteuerung verknüpft. Im Kern steht eine mathematische Beschreibung der Formation als „rigide“ Struktur: Die gewünschten Abstände zwischen den Robotern werden so gewählt, dass die Gesamtform eindeutig bestimmt ist, ähnlich den Stäben eines stabilen 3D-Gerüsts. Jeder Roboter verwendet dann eine gemeinsame Regel, um seine Bewegung so anzupassen, dass diese Abstände wiederhergestellt und erhalten bleiben, selbst während sich die Formation bewegt und dreht. Diese Regel ist sowohl für fliegende als auch für fahrende Roboter ausgelegt und passt sich online an Unsicherheiten wie nicht modellierter Reibung oder kleinen äußeren Stößen an.
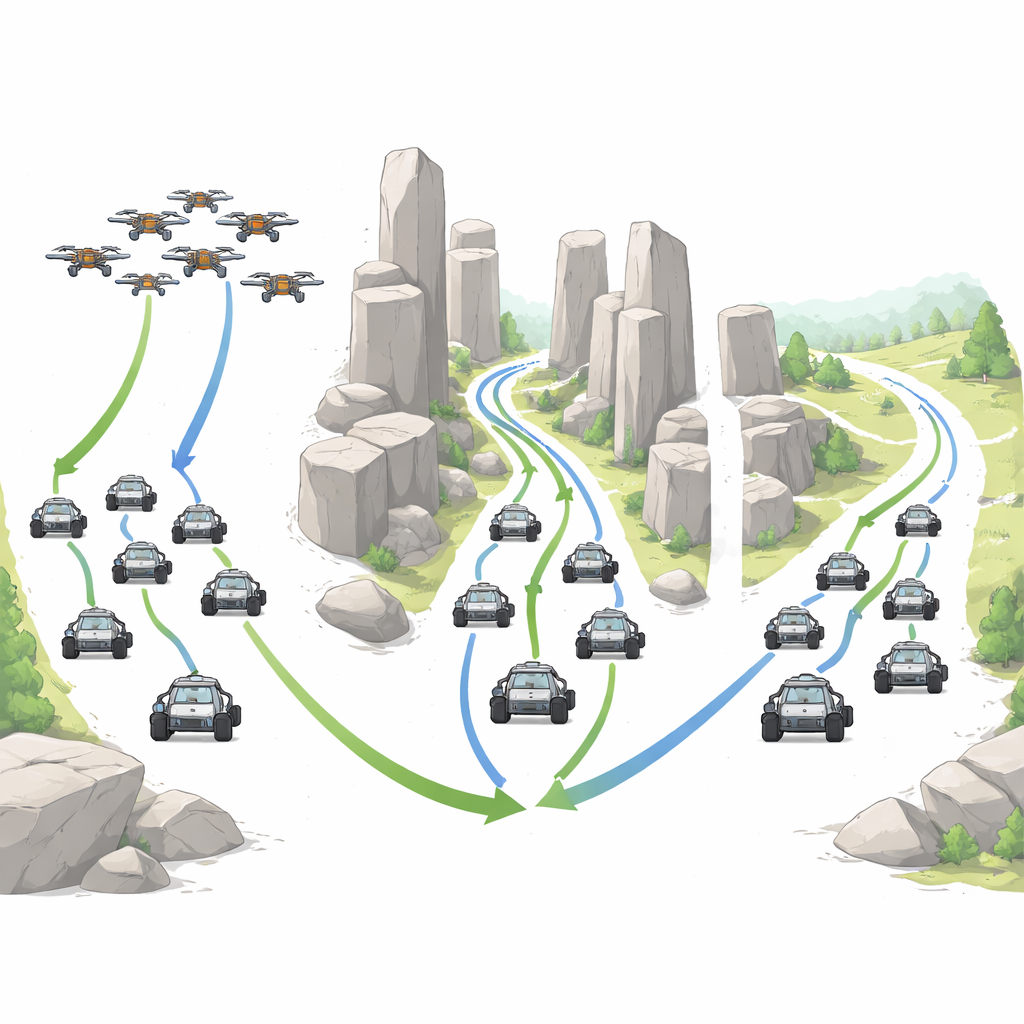
Die Formation durch enge Räume „atmen“ lassen
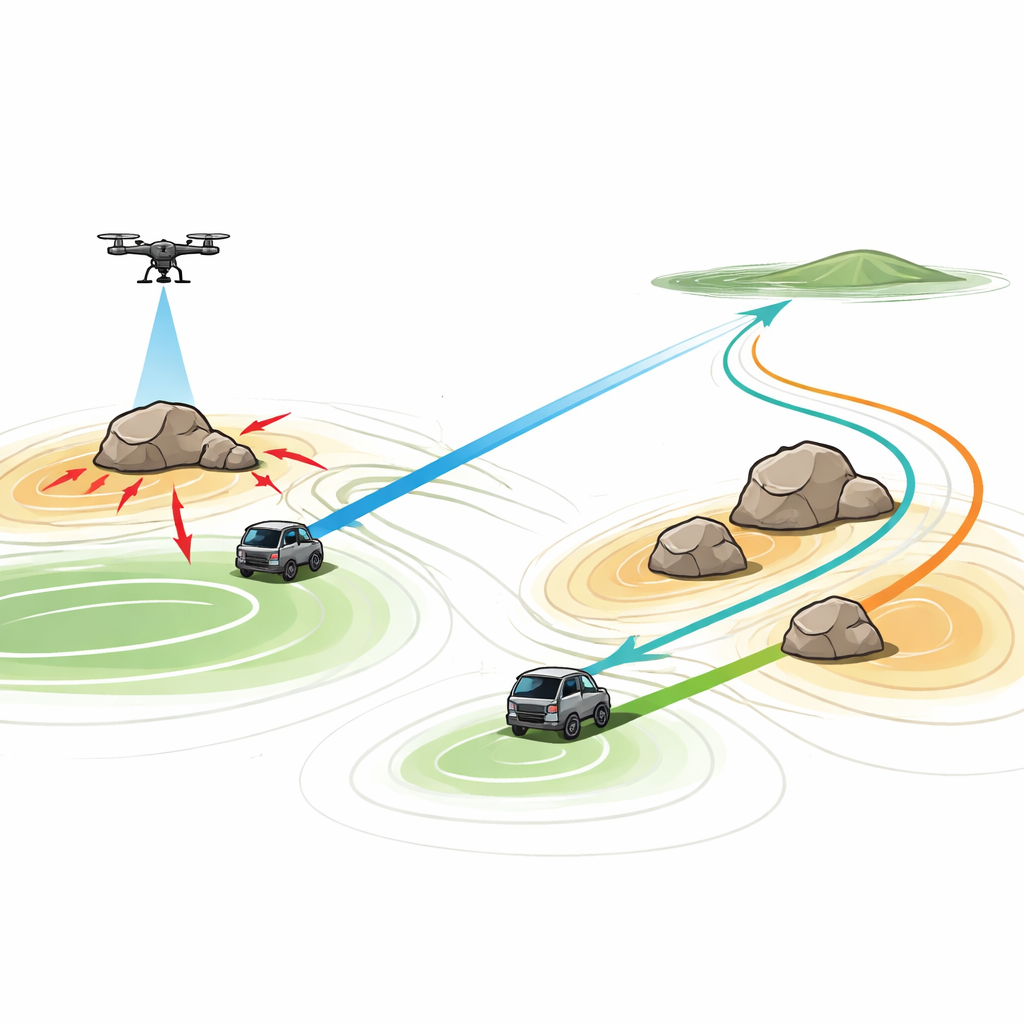
Reale Umgebungen sind selten freie Flächen; sie sind gefüllt mit Gebäuden, Bäumen, Fahrzeugen und bewegten Objekten. Eine Formation, die im offenen Raum sicher ist, kann zu groß sein, um durch eine enge Gasse oder einen dichten Hindernisverbund zu passen. Die vorgeschlagene Methode erlaubt der Formation, ihre Gesamtgröße gleichmäßig zu skalieren — zu schrumpfen oder zu wachsen — und dabei ihre Grundstruktur zu bewahren. Das Team führt ein führendes Bodenfahrzeug ein, das einen Weg mithilfe eines künstlichen Potentialfelds plant, wobei das Ziel als Attraktor wirkt und Hindernisse die Formation abdrängen. Anders als traditionelle Potentialfelder, die in Sackgassen stecken bleiben oder ruckartige Bewegungen verursachen können, passt ihre „adaptive sichere“ Version kontinuierlich an, wie stark Hindernisse die Roboter abstoßen, sodass ein sicherer Abstand gehalten wird, ohne übervorsichtig zu werden oder sich einzuschließen.
Intelligentere Wege durch Hindernisse und Bewegung
Das Potentialfeld wird weiter verfeinert, sodass die gesamte „Landschaft“ von Anziehung und Abstoßung stets ihr tiefstes Minimum am Ziel hat. Das hilft zu verhindern, dass die Formation an ungünstigen Stellen zwischen Hindernissen hängen bleibt. Die Stärke der abstoßenden Wirkung wird mit einer einfachen Lernregel in Echtzeit angepasst, die aus frühen Trainingsverfahren neuronaler Netze entlehnt ist. Wenn Roboter zu nahe an Hindernisse heranrücken, wächst die Abstoßung automatisch; bei ausreichendem Freiraum entspannt sie sich wieder. Wird die Umgebung so eng, dass selbst eine verkleinerte Formation nicht sicher passieren kann, aktiviert die Methode einen Rückfallmechanismus: Das Team pausiert kurz, erweitert gedanklich einen Sicherheitskorridor und plant eine sicherere Route um den problematischen Bereich herum, bevor es weiterfährt.
Testen in virtuellen Welten
Um die Leistungsfähigkeit der Methode zu prüfen, führen die Autoren umfangreiche Computersimulationen mit gemischten Teams aus Drohnen und Bodenfahrzeugen durch. Sie testen offene Bereiche mit wenigen Hindernissen, dichte Labyrinthe mit vielen Barrieren, Szenen mit bewegten Hindernissen und Formationen, die sich in komplexere 3D-Formen wie einen hexagonalen Prismawürfel verwandeln müssen. In all diesen Fällen bleibt die Formation dreidimensional zusammen, weicht statischen und bewegten Hindernissen sicher aus und passt bei Bedarf ihre Größe an. Die Roboter folgen glatten, effizienten Pfaden anstatt um Barrieren herum zu zickzacken. Im Vergleich zu mehreren gängigen Planungsmethoden — einschließlich klassischer und verbesserter Potentialfelder, Particle-Swarm-Optimierung sowie linearer und nichtlinearer modellprädiktiver Regelung — findet der neue Ansatz typischerweise kürzere, glattere und energieeffizientere Wege und berechnet diese schneller als aufwandsintensive optimierungsbasierte Verfahren.
Was das für reale Einsätze bedeutet
Für Nicht-Fachleute ist die Kernbotschaft, dass das Papier zeigt, wie gemischte Teams aus Flug- und Fahrrobotern sich wie ein einzelner, flexibler Körper durch dicht bebaute 3D-Räume bewegen können. Anstatt bei jedem Hindernis die Formation aufzulösen, kann die Gruppe sich biegen, verkleinern und neu ausrichten und dabei kohärent und sicher bleiben. Das könnte zu schnelleren, zuverlässigeren Robotereinsätzen bei Katastrophen, bei Industrieinspektionen und bei Sicherheitsrundgängen führen. Während die aktuelle Arbeit in Simulationen demonstriert wird und auf ein bezeichnetes Führungsfahrzeug setzt, skizzieren die Autoren zukünftige Schritte hin zu fehlertoleranteren Teams und realen Experimenten, wodurch die Vision eng koordinierter Luft–Boden-Roboterschwärme näher an die Praxis rückt.
Zitation: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Schlüsselwörter: Multi-Roboter-Formation, UAV-UGV-Kooperation, Hindernisvermeidung, Bewegungsplanung, Schwarmrobotik