Clear Sky Science · de
Ein Exoskelett für die oberen Gliedmaßen zur Teleoperation mit stufenloser Arm-Längen-Parametrisierung und adaptiver, kraftgetriggerter Impedanzmischung
Sicheres Hands-on-Arbeiten aus sicherer Entfernung
Viele der gefährlichsten Aufgaben auf der Erde — und im Weltraum — erfordern weiterhin menschliches Urteilsvermögen und Geschick. Denken Sie an die Reparatur einer beschädigten nuklearen Anlage, den Umgang mit Sprengstoffen oder die Stabilisierung eines Raumfahrzeugs. Diese Studie stellt eine neue Art von motorisiertem Arm-Exoskelett vor, mit dem eine Person einen entfernten Roboterarm so steuern kann, als wäre er ihr eigener, während sie weit genug von der Gefahrenquelle fernbleibt. Das Gerät zielt darauf ab, die Bewegung und das „Gefühl“ des Roboters wie eine natürliche Verlängerung des Trägers wirken zu lassen, selbst wenn es sich an unterschiedliche Armlängen und wechselnde Kräfte in der Umgebung anpasst.
Warum entfernte Arme wichtig sind
Roboter arbeiten bereits unter Wasser, in Katastrophengebieten und in Reaktoren, doch die meisten sind entweder vorprogrammiert oder werden mit einfachen Joysticks gelenkt. Das schränkt ihre Einsatzmöglichkeiten ein, wenn sich die Bedingungen plötzlich ändern. Teleoperationssysteme — bei denen eine Person einen entfernten Roboter in Echtzeit steuert — bieten einen Mittelweg und verbinden menschliche Entscheidungsfähigkeit mit roboterhafter Kraft und Reichweite. Frühere Systeme konnten Werkzeuge bewegen, litten aber oft unter ungenauer Kraftrückmeldung und ließen sich nur schwer an unterschiedliche Körper der Anwender anpassen. Das führte zu ungeschickten Bewegungen, schlechtem „Gefühl“ und zusätzlicher Belastung sowohl für den Bediener als auch für die Maschine.
Ein tragbarer Roboterarm, der wirklich passt
Das Team entwickelte ein tragbares Exoskelett für den oberen Arm mit sieben angetriebenen Gelenken, die mit Schulter, Ellenbogen und Handgelenk ausgerichtet sind. Leichte Materialien wie Kohlefaser und Aluminium halten das Gerät reaktionsschnell statt schwer und träge. Eine wichtige Neuerung ist, dass die Länge des Ober- und Unterarms des Exoskeletts stufenlos verstellbar ist, nicht nur in wenigen festen Stufen. Schienen mit integrierten elektrischen Sensoren messen kontinuierlich die tatsächliche Armlänge des Trägers und speisen diese Information in ein digitales Körpermodell ein. Dadurch passt sich die interne Geometrie des Geräts automatisch an jede Person an, was den Tragekomfort verbessert und die Bewegungen des Roboters treuer an die Absichten des Menschen bindet. 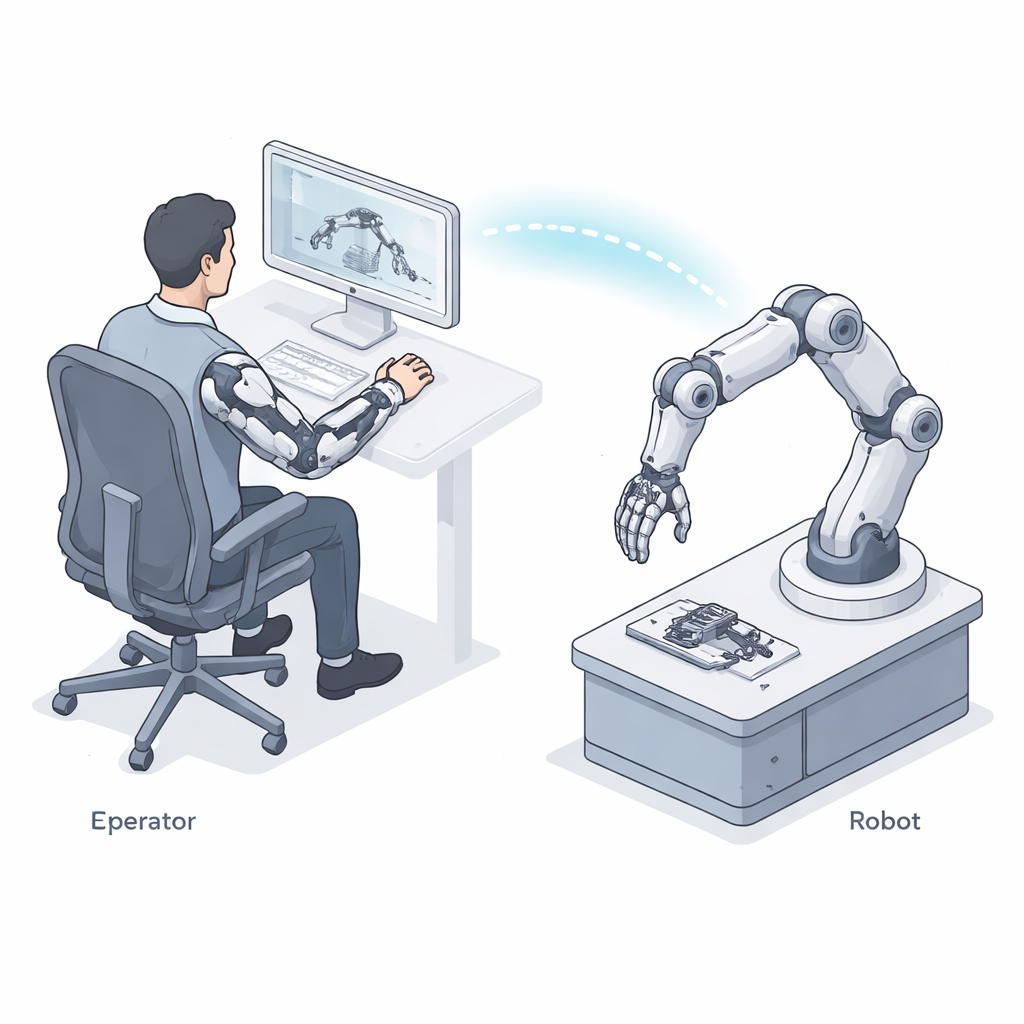
Sich mit dem Körper bewegen, nicht gegen ihn
Die menschliche Schulter dreht sich nicht nur wie ein Scharnier; das Schulterblatt gleitet auch über den Brustkorb. Viele Exoskelette ignorieren dies und kämpfen letztlich gegen natürliche Bewegungen, was Unbehagen verursacht. Dieses Design ergänzt ein passives Modul mit mehreren zusätzlichen Freiheitsgraden, das leise den feinen Verschiebungen von Schulter und Oberkörper folgt und so Druck auf Haut und Gelenke reduziert. Gleichzeitig sind die angetriebenen Gelenke so abgestimmt, dass ihr Drehmoment — die Drehkraft — unter sicheren Grenzen für menschliches Gewebe bleibt. Not-Aus-Funktionen und Blockiererkennungen runden die Sicherheitsmerkmale ab und ermöglichen dem System, schnell zu reagieren, falls etwas schiefgeht.
Eine intelligentere Art, Kontakt zu spüren
Über die Mechanik hinaus legen die Autorinnen und Autoren Wert darauf, was der Träger fühlt. Wenn der entfernte Roboter etwas berührt oder dagegen drückt — eine Wand, den Griff eines Werkzeugs oder ein anderes Objekt — werden diese Kräfte durch das Exoskelett zurückübersetzt, sodass der Nutzer Widerstand verspürt. Das Steuerungssystem verbindet zwei normalerweise gegensätzliche Anforderungen: präzises Nachführen der Bewegungen des Bedieners und sanftes, nachgiebiges Verhalten bei hohen Kontaktkräften. Bei niedrigen Kräften verhält sich das System steif und genau und folgt dem Armpfad des Trägers eng. Überschreitet die Kraft eine Sicherheitsgrenze, weicht die Regelung automatisch nach und erlaubt Nachgiebigkeit, sodass Stöße abgefedert statt ruckartig weitergegeben werden. Die Autoren verwenden energiebasierte mathematische Werkzeuge, um zu zeigen, dass dieses gemischte Verhalten stabil bleibt und nicht in Schwingungen ausläuft. 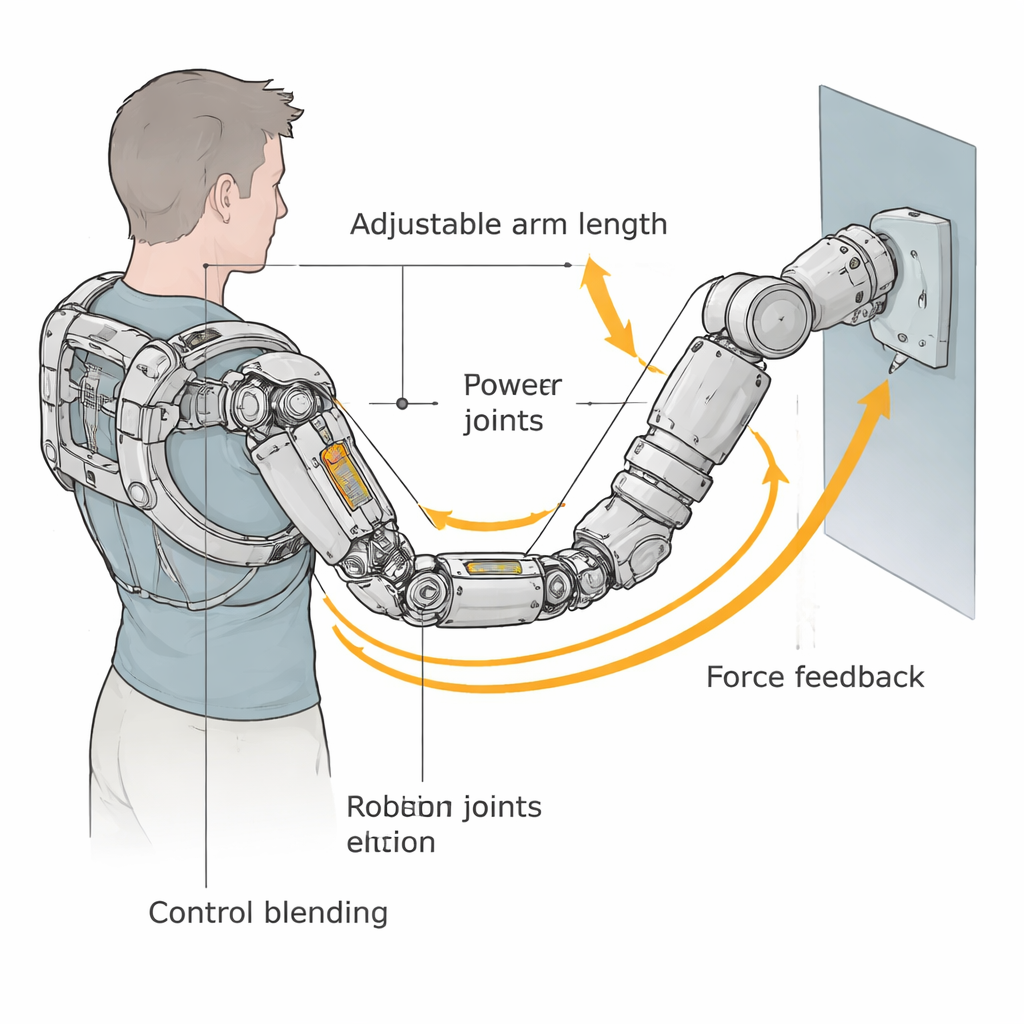
Erprobung des Systems
Um das Exoskelett zu bewerten, verbanden die Forschenden es mit einem weit verbreiteten Industrieroboterarm. Wenn eine Person das Exoskelett trug und eine Acht in die Luft zeichnete, reproduzierte der entfernte Roboter die Bewegung genau, trotz kleiner Kommunikationsverzögerungen. Weitere Tests untersuchten die Funktion der Armlängenmessung: Spannungsmessungen der Gleitsensoren stimmten mit physischen Messungen überein und wiesen Fehler von weniger als wenigen Millimetern auf, selbst nach wiederholtem An- und Ausziehen. In kontrollierten Simulationen, in denen der Roboter gegen eine virtuelle starre Wand drückte, reduzierte das vollständige Regelungsschema die Spitzenkontaktkräfte um nahezu 70 Prozent verglichen mit einer einfachen Konfiguration, während die Genauigkeit beim Nachführen in freien Bewegungen weitgehend erhalten blieb.
Was das für Arbeit und Pflege in der Praxis bedeutet
Alltagssprachlich bringt uns diese Forschung näher an ferngesteuerte Roboter, die sich beim Steuern so natürlich und sicher anfühlen wie das Bewegen des eigenen Arms. Durch die Kombination eines körpernahen, anpassbaren Rahmens, sorgfältigem Nachverfolgen menschlicher Bewegungen und intelligenter Kraftrückmeldung, die sich in Echtzeit anpasst, verspricht das System präzisere und weniger ermüdende Teleoperation in gefährlichen Umgebungen. Dieselbe Technik könnte auch Patienten in der Schlaganfallrehabilitation dienen, indem Therapeutinnen und Therapeuten Armbewegungen lenken und aufzeichnen, während Patienten realitätsnahe Unterstützung und Rückmeldung erhalten. Wenn künftige Versionen Signale aus Muskeln und Blickrichtung integrieren und aus Erfahrung lernen, könnten solche Exoskelett‑Robot‑Paare vielseitige Werkzeuge für extreme Einsätze und die alltägliche Rehabilitation werden.
Zitation: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Schlüsselwörter: Teleoperations-Exoskelett, Roboterarmsteuerung, Kraft-Rückmeldung, Rehabilitationsrobotik, ferngesteuerte gefährliche Einsätze