Clear Sky Science · de
End-to-end-Notfallprotokoll für Tunnelunfälle erweitert durch Verstärkungslernen
Warum intelligentere Tunnelrettungen wichtig sind
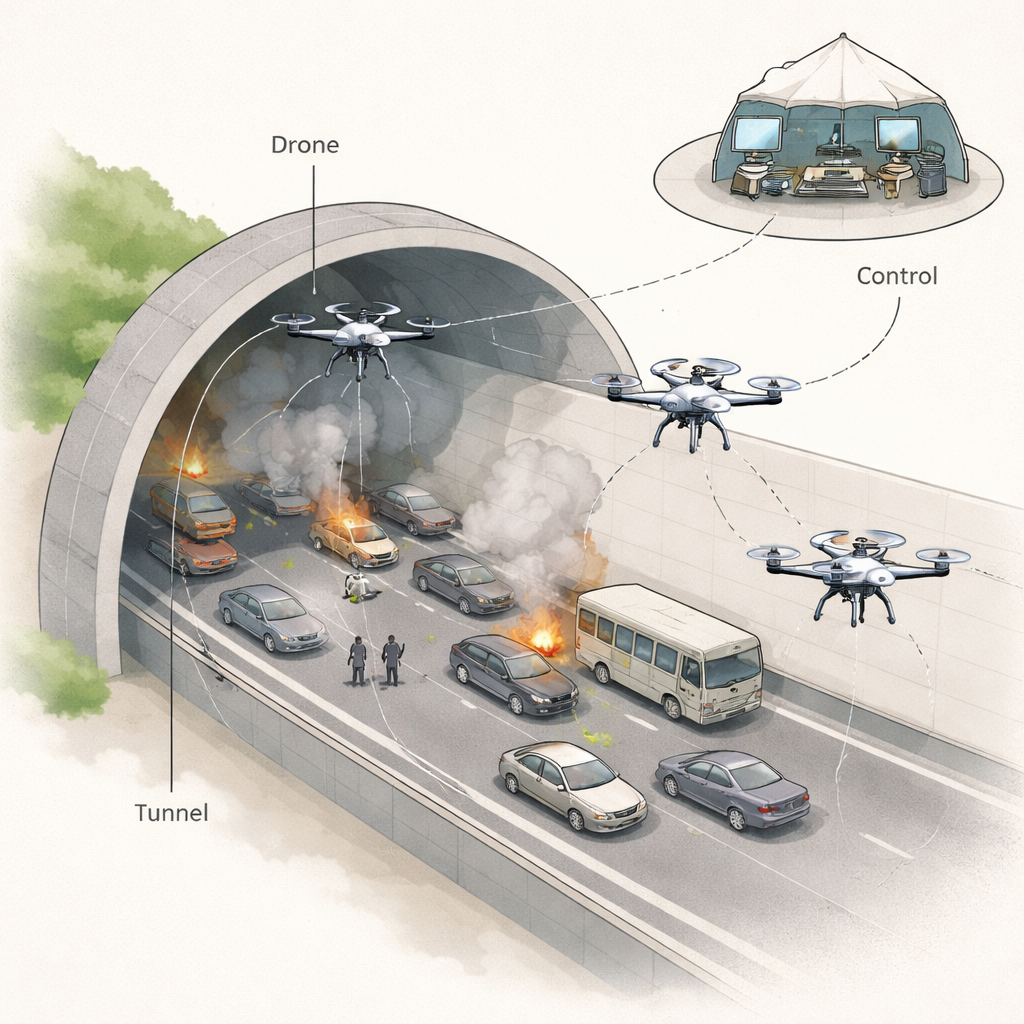
Wenn in einem Straßentunnel eine Katastrophe eintritt – sei es durch einen Unfall, Brand oder Einsturz – können Menschen in einem langen, rauchgefüllten, labyrinthartigen Rohr mit sehr wenigen Ausgängen eingeschlossen sein. Menschliche Retter müssen genau dann eingreifen, wenn die Sicht abnimmt, die Temperaturen steigen und Trümmer den Weg versperren. Diese Studie untersucht, wie kleine Flugdrohnen, gesteuert durch eine intelligente Lernstrategie, in solchen gefährlichen Situationen schnelle, verlässliche Helfer werden könnten: Opfer finden und sichere Wege kartieren, während sie Menschenteams vor den schlimmsten Gefahren schützen.
Gefährliche unterirdische Engpässe
Moderne Städte sind auf Tunnel für Autobahnen, Züge und Versorgungsleitungen angewiesen, doch dieselbe geschlossene Bauweise, die sie effizient macht, macht Unfälle darin außerordentlich tödlich. Feuer verbreiten schnell Rauch, giftige Gase sammeln sich an, und enge Passagen können durch verunfallte Fahrzeuge oder herabfallenden Beton verstopfen. Traditionelle Rettungsteams dringen oft mit begrenzten Informationen vor und müssen raten, wohin sie gehen sollen, während ihre Funkgeräte durch dicken Fels und Beton gestört werden. Frühere Katastrophen in China, Japan und anderen Ländern haben gezeigt, wie schwierig es ist, Opfer rechtzeitig zu erreichen, und unterstreichen die Notwendigkeit von Werkzeugen, die sehen und vorausdenken können, wie Menschen es nicht vermögen.
Drohnen das Erkunden und Suchen beibringen
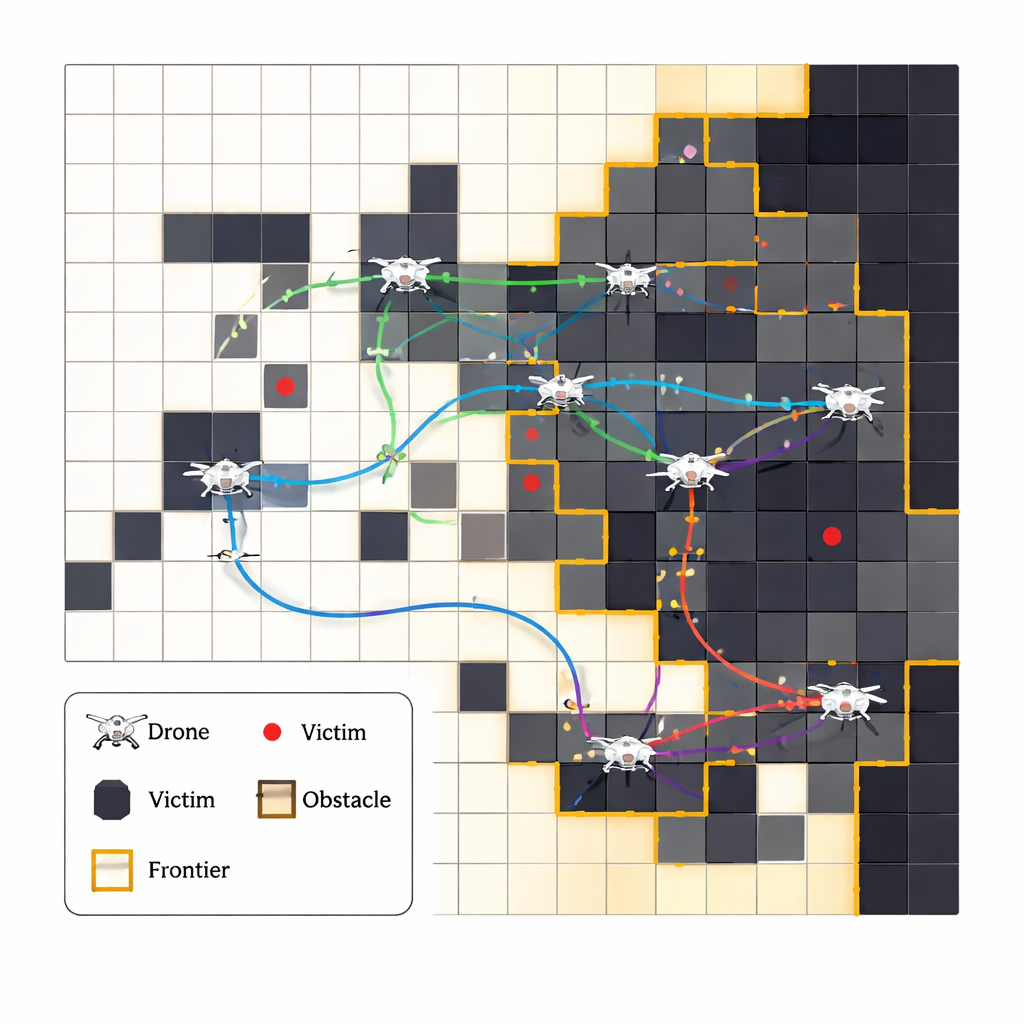
Die Autoren schlagen ein System vor, bei dem mehrere autonome Drohnen zusammenarbeiten, um einen beschädigten Tunnel zu erkunden, eine Live-Karte zu erstellen und eingeschlossene Personen zu lokalisieren. Anstatt einer festen, vorprogrammierten Route zu folgen, lernt jede Drohne aus Erfahrung mittels einer Methode namens Verstärkungslernen: Sie probiert Aktionen, beobachtet die Folgen und entdeckt nach und nach, welche Entscheidungen zu schnelleren Rettungen und weniger Fehlern führen. Der Tunnel wird als Gitter aus Zellen dargestellt, und die Drohnen konzentrieren sich auf sogenannte „Frontiers“, also Stellen, an denen bekannter Raum auf unbekannten Raum trifft, und treiben diese Grenze stetig voran. Bei jedem Schritt wählen sie aus einer kleinen Menge von Gitterbewegungen und aktualisieren interne Tabellen darüber, welche Züge in ähnlichen Situationen zuvor am erfolgreichsten waren.
Viele Roboter zur Kooperation bringen – ohne viel Funkverkehr
Mehrere Drohnen gleichzeitig denselben Tunnel absuchen zu lassen, wirft eine neue Herausforderung auf: Wie verhindern sie Zusammenstöße oder das wiederholte Absuchen derselben Bereiche, besonders wenn die Kommunikation unzuverlässig ist? Statt ihnen einen zentralen Chef oder ständigen Funkverkehr zu geben, entwerfen die Forscher ein einfaches Bewertungssystem, das stillschweigend gutes Gruppenverhalten fördert. Eine Drohne erhält eine große Belohnung, wenn sie ein neues Opfer entdeckt, wird jedoch bestraft, wenn sie Zeit damit verschwendet, denselben Ort erneut zu besuchen, mit einer anderen Drohne kollidiert oder „versagt“, indem ihre Batterie leerläuft. Im Laufe der Zeit bringt das jede Drohne dazu, unerforschte Regionen zu bevorzugen und Abstand zu ihren Teamkollegen zu halten, sodass eine Form von Kooperation natürlich aus den geteilten Konsequenzen entsteht, obwohl jede Drohne technisch für sich allein lernt.
Tricks von Wölfen ausleihen, um nicht festzufahren
Reines Trial‑and‑Error-Lernen kann manchmal in sicheren, aber zweitbesten Gewohnheiten stecken bleiben – zum Beispiel stets einen vertrauten Korridor zu wählen, anstatt einen riskanten Abkürzungsweg zu versuchen. Um die Drohnen neugierig zu halten, entlehnt das Team Ideen aus einem mathematischen Modell, wie Grauwölfe in Rudeln jagen. Diese Komponente „Grey Wolf Optimization“ veranlasst die Drohnen, gelegentlich die bisher leistungsstärksten Suchmuster zu imitieren, lässt aber gleichzeitig Raum für Exploration. In der Praxis beeinflusst sie, welche neuen Aktionen ausprobiert werden, und hilft dem Lernprozess, aus Sackgassen auszubrechen und sich anzupassen, wenn sich der Tunnel verändert – etwa wenn ein Teil der Strecke plötzlich durch Feuer oder Trümmer blockiert wird.
Den Ansatz in virtuellen Katastrophen testen
Da es zu gefährlich ist, unbewährte Strategien in echten Notfalltunneln zu erproben, bauen die Forscher detaillierte Computersimulationen, die enge Gänge, Sackgassen, Hindernisse und verstreute Opfer nachbilden. Sie vergleichen ihr lernbasiertes System mit mehreren anderen Methoden, darunter reines zufälliges Umherfliegen und alleinstehende Optimierung ohne Lernen. Sowohl in Einzel- als auch in Mehrdrohnentests findet ihr Ansatz Opfer schneller, erkundet mehr vom Tunnel mit weniger verschwendeten Schritten und vermeidet Kollisionen zuverlässiger. Wichtig ist, dass dies mit leichten, tabellenbasierten Berechnungen statt energieintensiver Deep‑Learning‑Netze gelingt, sodass es realistisch auf kleinen Bordcomputern während eines tatsächlichen Notfalls laufen könnte.
Was das für zukünftige Rettungen bedeuten könnte
Die Studie zeigt, dass Schwärme relativ einfacher Drohnen, geleitet von sorgfältig gestalteten Lernregeln und einigen aus der Natur übernommenen Ideen, wertvolle Partner für Feuerwehr und Rettungsteams bei Tunnelunglücken werden könnten. Indem sie rauchige, sich verändernde Umgebungen schnell kartieren und ohne ständige menschliche Steuerung wahrscheinliche Opferorte anfliegen, könnten solche Systeme wertvolle Minuten bei der Reaktionszeit sparen und gleichzeitig das Risiko für Ersthelfer verringern. Obwohl die bisherigen Arbeiten auf Simulationen und idealen Sensoren basieren, legen sie eine praktische Grundlage für zukünftige reale Systeme, die unter engen Zeit-, Energie- und Rechenbegrenzungen in einigen der herausforderndsten Rettungsszenarien der Erde funktionieren müssen.
Zitation: ur Rehman, H.M.R., Gul, M.J., Younas, R. et al. End-to-end emergency response protocol for tunnel accidents augmentation with reinforcement learning. Sci Rep 16, 6226 (2026). https://doi.org/10.1038/s41598-026-37191-w
Schlüsselwörter: Tunnel-Notfallreaktion, Such- und Rettungsdrohnen, Multi-Agenten-Verstärkungslernen, robotisches Katastrophenmanagement, autonome Erkundung