Clear Sky Science · de
Echtzeit-Schätzung des Batterieladezustands und autonome Ladestrategie für dynamischen Energiespeicher-Laderoboter mit erweitertem Kalman-Filter
Warum intelligentere Roboterbatterien wichtig sind
Von Lagerboten bis zu Inspektionsrobotern sind mobile Roboter nur so nützlich wie ihre Batterien es zulassen. Wenn ein Roboter unterschätzt, wie viel Energie ihm noch bleibt, kann er weit vom Ladepunkt liegen bleiben, was Arbeit unterbricht und die Batterie gefährdet. Dieses Papier stellt eine neue Methode vor, mit der Roboter ihren tatsächlichen Batteriezustand in Echtzeit „kennen“ und selbst entscheiden können, wann und wie sie nachladen — sodass sie länger, sicherer und mit weniger menschlicher Aufsicht arbeiten können.

Roboter, anspruchsvolle Aufgaben und belastete Batterien
Im Gegensatz zu Elektroautos, die auf Autobahnen gleichmäßig fahren, stehen viele mobile Roboter abrupten Starts, Stopps und häufig wechselnden Lasten gegenüber. Diese Stöße verursachen schnelle Schwankungen von Batterie-Strom und -Spannung, die traditionelle Verfahren zur Schätzung der verbleibenden Ladung verwirren. Einfache Methoden, die nur die Batteriespannung ablesen oder den Strom über die Zeit aufsummieren, setzen meist ruhige, konstante Bedingungen voraus und berücksichtigen nicht, wie die Batterie altert oder sich erwärmt. In der Folge driftet die Schätzung, Fehler bauen sich auf, und der Roboter lädt entweder zu häufig nach oder beansprucht die Batterie zu stark, was ihre Lebensdauer verkürzt.
Ein realistischeres Modell dessen, was in der Batterie passiert
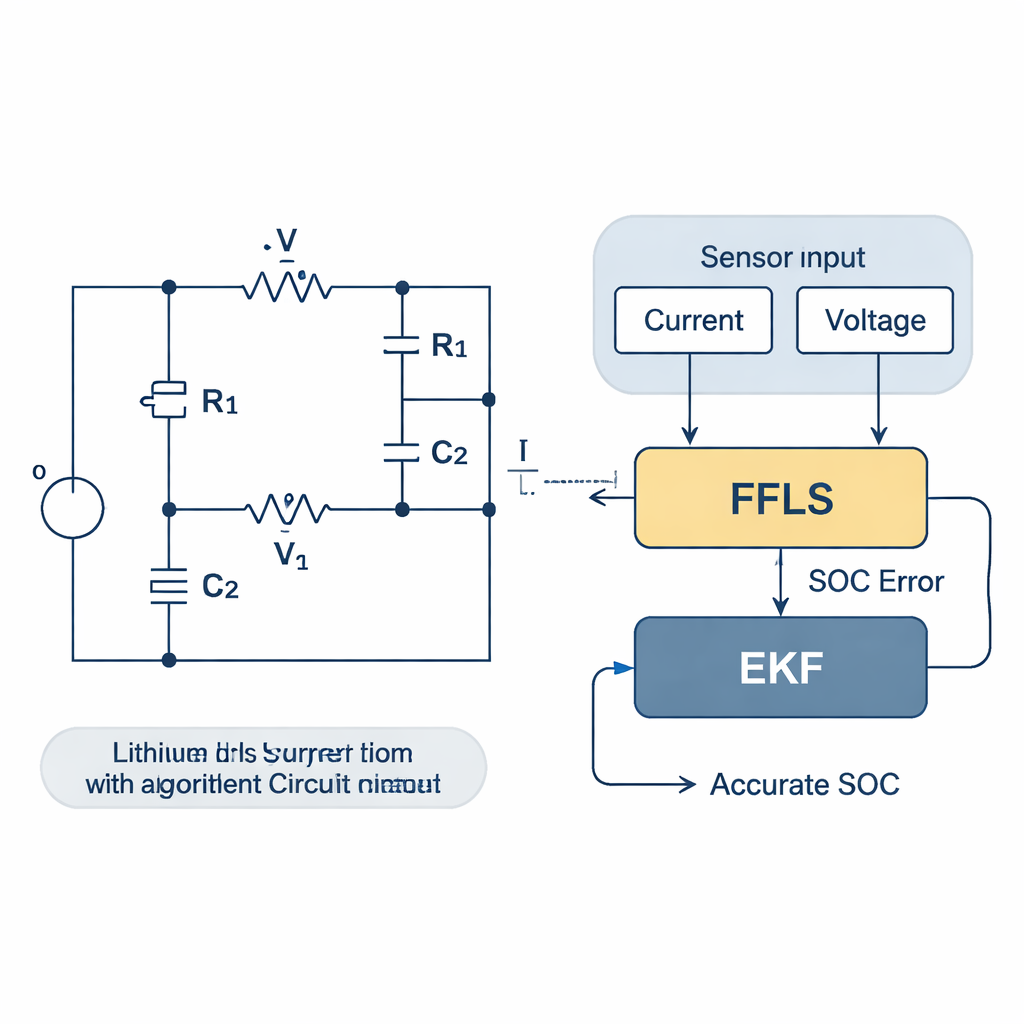
Die Autoren begegnen dem, indem sie dem Roboter ein realistischeres Bild seines Lithium‑Eisenphosphat‑Akkupacks geben. Statt die Batterie als Blackbox mit einer einzigen Spannungszahl zu behandeln, modellieren sie sie als elektrisches Netzwerk mit Innenwiderstand und zwei „Polarisations“-Ästen, die nachahmen, wie Ionen sich im Inneren der Zelle bewegen und akkumulieren. Dieses RC-Modell zweiter Ordnung erfasst schnelle und langsame Reaktionen auf Laständerungen. Der Roboter misst kontinuierlich Strom und Spannung und passt diese Signale mittels eines Kleinste-Quadrate-Verfahrens an das Modell an, das einen „Vergessensfaktor“ enthält – eine mathematische Möglichkeit, neueren Daten mehr Gewicht zu geben und veraltete Historie ausklingen zu lassen, wenn sich die Bedingungen ändern.
Das Algorithmus lernen und sich unterwegs anpassen lassen
Auf diesem Modell setzen die Forscher einen erweiterten Kalman‑Filter ein, ein weit verbreitetes Werkzeug zur Verfolgung verborgener Zustände in verrauschten Daten. Hier ist der verborgene Zustand der wahre Ladezustand der Batterie. Während der Roboter arbeitet, sagt der Filter aufgrund des Modells und des gemessenen Stroms voraus, wie sich der Ladezustand ändern sollte, und korrigiert diese Vorhersage mit der gemessenen Spannung. Das Kleinste‑Quadrate‑Modul mit Vergessensfaktor aktualisiert die wichtigsten Modellparameter online, sodass sich der Filter nie auf eine veraltete, werkskalibrierte Batteriebeschreibung stützt. Klug nutzen die Forscher außerdem eine Verbindung zwischen Innenwiderstand und einer Größe, die Polarisationskapazität genannt wird: Mit steigender Temperatur sinkt der Widerstand und die Kapazität steigt. Indem das System beides gemeinsam beobachtet, kann es Temperatureffekte ohne physischen Temperatursensor ableiten und das Modell entsprechend anpassen.
Roboter beibringen, wann und wie sie nachladen
Genaue Ladungsschätzungen sind nur die halbe Miete; die andere Hälfte ist, wie der Roboter sie nutzt. Die Autoren entwerfen eine autonome Ladestrategie, die sowohl ständiges „Nachfüllen“ als auch tiefe Entladungen vermeidet. Sie definieren obere und untere Ladegrenzen: Fällt die Batterie unter eine Schwelle, priorisiert der Roboter die Rückkehr zur Ladestation; befindet er sich nahe der oberen Grenze, verschiebt er das Laden und arbeitet weiter. Innerhalb des sicheren Bereichs lädt der Roboter in Leerlaufmomenten nach. Das System überwacht außerdem jede Zelle im Pack und balanciert deren Ladung, damit keine Zelle überfüllt wird, während andere zurückbleiben — ein wichtiger Schritt zur Vermeidung vorzeitigen Alterungs. Um das Andocken effizient zu gestalten, kombiniert der Roboter raumbezogene Navigation mit kurzreichweitiger Infrarotführung, was Wege und Andockzeit verkürzt.
Langlebigere, zuverlässigere Roboterversorgung
In Tests mit öffentlichen Batteriedatensätzen, Simulationen und realen Robotern schätzte die neue Methode den Ladezustand mit etwa 98 % Genauigkeit und übertraf damit deutlich mehrere fortgeschrittene Alternativen auf Basis von Partikelfiltern, neuronalen Netzen und Transformers. Mit diesem Ansatz verwaltete Batterien hielten ihre Ladung über Wochen simulierter Nutzung besser und überlebten 15–40 % mehr Lade‑/Entladezyklen als bei konkurrierenden Methoden. Der Innenwiderstand stieg langsamer, ein Indikator für gesündere Zellen, und Roboter verbrachten weniger Zeit angedockt, während die Batteriegesundheit höher blieb. Für Laien lautet die Quintessenz: Diese Technik ermöglicht es Robotern, bessere „Hüter“ ihrer eigenen Batterien zu werden: Sie können ihre Energie präziser einschätzen, intelligentere Zeitpunkte zum Nachladen wählen und die Lebensdauer teurer Akkupacks unauffällig verlängern, ohne zusätzliche Sensoren oder hohe Rechenleistung.
Zitation: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Schlüsselwörter: mobile Roboter, Batterie-Ladezustand, autonomes Laden, erweiterter Kalman-Filter, Lithium-Eisenphosphat-Batterien