Clear Sky Science · de
Dynamische Kettenplanung zur Einsatzplanung von Multi-AGV-Systemen mit ladeabhängigem Bewegungsprofil
Warum Lagerroboter bessere Zeitplanung brauchen
Der Onlinehandel hat Lager mit Waren gefüllt, die schnell, sicher und rund um die Uhr bewegt werden müssen. Viele Einrichtungen setzen inzwischen auf Flotten von Bodenrobotern – Automated Guided Vehicles (AGVs) –, die Regale und Paletten transportieren. Wenn diese Roboter jedoch mit zu vereinfachenden Annahmen über ihr Bewegungsverhalten geplant werden, kann das Zeit verschwenden, empfindliche Pakete erschüttern oder sogar Kollisionen begünstigen. Diese Arbeit stellt eine neue Methode zur gleichzeitigen Planung und Koordination vieler AGVs vor, die das reale physikalische Verhalten der Fahrzeuge berücksichtigt und in geschäftigen Lagern einen ruhigeren Verkehr sowie sicherere Ladung verspricht.
Roboter, die Güter bewegen, nicht nur Zahlen
Moderne AGVs durchqueren bereits Lagerhallen, Flughäfen und Fabriken und ziehen Wagen oder heben Regale und Paletten. Die meisten vorhandenen Softwaresysteme zur Flottenverwaltung arbeiten auf hoher Ebene: Sie entscheiden, welcher Roboter welchen Auftrag übernimmt und grob welche Route er fahren soll. Um die Rechnung zu vereinfachen, wird dabei meist angenommen, dass die Reisezeit zwischen zwei Punkten fest sei, wobei Beschleunigungs‑ und Verzögerungsfähigkeiten oder die Last des Fahrzeugs außer Acht gelassen werden. Die Autoren zeigen, dass diese Vereinfachung in realen Gebäuden Probleme verursacht. Roboter können an Kreuzungen früher oder später eintreffen als erwartet, was die Wahrscheinlichkeit von Staus, Beinahe-Zusammenstößen oder abruptem Bremsen erhöht und damit das transportierte Gut erschüttern kann.
Realphysik in den Zeitplan einbauen
Die Forschenden schließen diese Lücke mit einem zweistufigen Ansatz, der Physik und Einsatzplanung kombiniert. Zuerst entwickeln sie einen Dynamic Traveling Time-Schätzer für AGVs, genannt DTT-AGV. Anstatt einen Korridor als einzigen Zeitblock zu behandeln, zerlegt DTT-AGV jede Bewegung in Phasen: Beschleunigen, konstante Fahrt und Abbremsen. Es nutzt ein einfaches mechanisches Modell eines AGV mit Regal, wobei das Regal wie eine durch Federn und Dämpfer gekoppelte Masse wirkt. Dieses Modell erfasst, wie Beschleunigung und Verzögerung die Ladung schwingen oder vibrieren lassen können. Darauf basierend berechnet der Algorithmus, wie schnell das Fahrzeug über eine gegebene Distanz und mit einer bestimmten Last sicher fahren kann, ohne Grenzwerte für Geschwindigkeit, Kräfte oder Schwingungen zu überschreiten, und liefert so für jeden Abschnitt der Route eine realistische Reisezeit.
Roboter daran hindern, sich frontal zu begegnen
Im zweiten Schritt stellen die Autorinnen und Autoren eine Arrival Time Chaining‑Methode vor, ATC-AGV, die viele Roboter auf gemeinsamen Wegen koordiniert. Sobald DTT-AGV die Dauer jedes Abschnitts geschätzt hat, weist ATC-AGV präzise Ankunfts‑ und Abfahrtszeiten an jedem Knotenpunkt – Kreuzungen, Abzweigen oder Übergabestellen – entlang der Route eines jeden Roboters zu. Es baut an jedem gemeinsamen Knoten eine Zeit‑„Kette“ auf, die einen sicheren Zeitabstand zwischen den Fahrzeugen gewährleistet und dabei aktuelle Zustände der Roboter berücksichtigt, etwa ob sie beladen sind, laden oder wenden. Würde ein neuer Plan dazu führen, dass zwei AGVs einen Knoten zeitlich zu dicht besetzen, verschiebt ATC-AGV den Zeitplan eines Roboters gerade so weit, dass die Sicherheitsmarge wiederhergestellt ist. Effektiv verwandelt es das Bodengitter des Lagers in eine zeitbewusste Karte, die hilft, Kollisionen zu verhindern, bevor sie entstehen können.
Sanftere Bewegungen und schonendere Fahrten testen
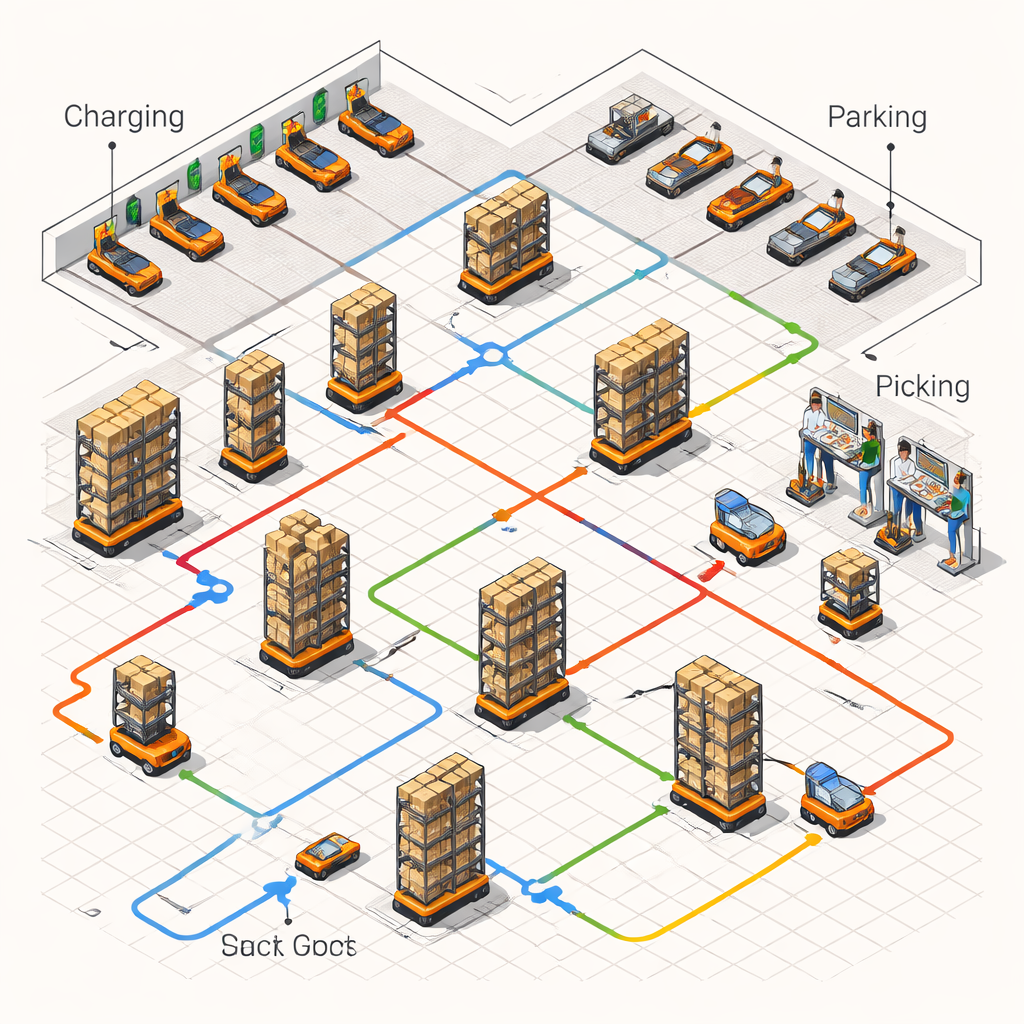
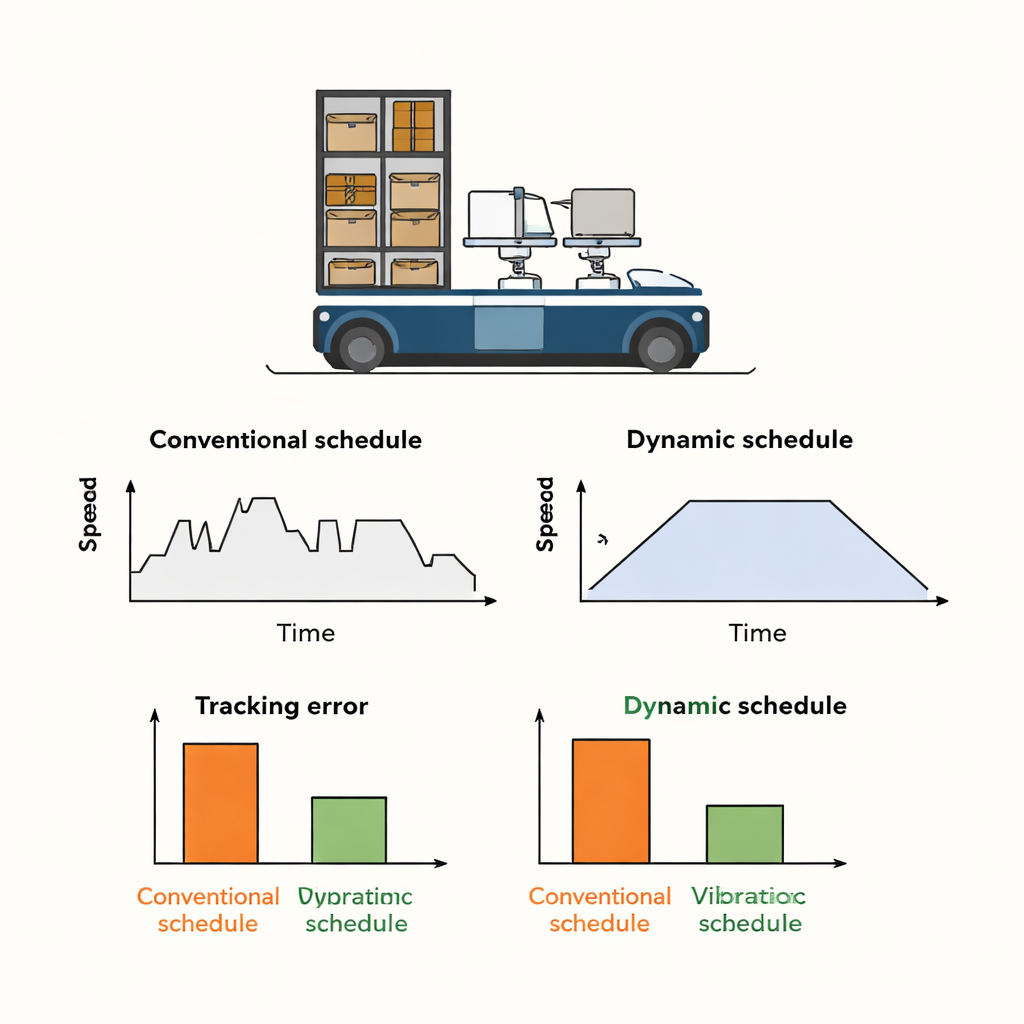
Um ihre Ideen zu prüfen, simulieren die Forschenden AGVs in einem rasterförmigen Cross‑Docking‑Lager mit Ladebereichen, Parkplätzen und Regalzonen. Sie vergleichen ihren Planer mit einer konventionellen Methode, die nahezu konstante Geschwindigkeit annimmt und detaillierte Bewegungsphasen ignoriert. In einem Test fährt ein Roboter entlang eines L‑förmigen Pfads und macht dann eine 90‑Grad‑Wendung. Der traditionelle Ansatz erzeugt scharfe Geschwindigkeitsänderungen an der Ecke, denen der reale Roboter nicht perfekt folgen kann. Das Ergebnis sind große Regelabweichungen – Differenzen zwischen Soll‑ und Ist‑Position – und Spitzen in den Zeitfehlern an kritischen Punkten. Mit dem neuen Planer wird der Pfad in klare Beschleunigungs‑, Reise‑ und Bremsphasen unterteilt. Der simulierte Roboter folgt nun seinem Zielpfad deutlich genauer, mit viel kleineren Fehlern und gleichmäßigeren Kurven.
Schonender für Packstücke und zukunftssicher
Die zweite Testreihe konzentriert sich auf das Verhalten der Ladung selbst. Bei Verwendung des konventionellen Zeitplans erfährt die Basis des Roboters plötzliche Beschleunigungsstöße, die das federartige Verhalten des Regals anregen und starke Vibrationen in der Ladung verursachen. Mit dem dynamischen, ladebewussten Zeitplan bleiben die Beschleunigungen in einem engeren Band und verändern sich sanfter. Über die Zeit gemessen sinken sowohl Spitzen‑ als auch Durchschnittsvibrationen der Last deutlich, was für fragile, gestapelte oder instabile Güter entscheidend ist. Die Autoren untersuchen außerdem vernachlässigte Faktoren wie Rad‑Boden‑Reibung und stellen fest, dass unter typischen Lagerbedingungen der zusätzliche Zeitfehler innerhalb der in ihren Algorithmus eingebauten Sicherheitspuffer bleibt.
Was das für reale Lager bedeutet
Einfach gesagt bringt diese Arbeit AGV‑Einsatzplanern bei, die reale Bewegung der gesteuerten Maschinen zu respektieren. Indem Fahrzeiten und Vorfahrtsentscheidungen darauf basieren, wie schnell Roboter wirklich beschleunigen, abbremsen und unterschiedliche Lasten transportieren können, ohne diese zu beschädigen, verringert das vorgeschlagene Framework Pfadfolgefehler, reduziert Ladungsvibrationen und senkt das Risiko von Konflikten an Kreuzungen. Für Lagerbetreiber und Hersteller bedeutet das flüssigeren Verkehr, schonenderen Umgang mit Waren und eine Grundlage, die mit wachsenden Flotten und komplexeren Layouts skaliert werden kann.
Zitation: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Schlüsselwörter: automatisierte geführte Fahrzeuge, Lagerrobotik, Kollisionsfreie Einsatzplanung, Bewegungsplanung, intelligente Logistik