Clear Sky Science · de
Landung eines Quadrotors an Wänden mittels adaptiver, zweiter Ordnung und stetiger Regelung bei Unsicherheiten
Warum das Anhaften von Drohnen an Wänden wichtig ist
Stellen Sie sich eine winzige Drohne vor, die nicht einfach so lange schwebt, bis der Akku leer ist, sondern wie ein Vogel an einer Wand landet und dort stundenlang unauffällig eine Brücke, ein Feld oder einen Waldrand überwacht. Dieses Papier stellt eine neue Regelungsmethode für solche „Perching“-Drohnen vor: Sie soll es ihnen ermöglichen, an eine vertikale Fläche heranzufliegen, Kontakt aufzunehmen ohne abzuprallen und auch bei turbulenter Luft oder unvollständigem Modellwissen stabil zu haften. Die Arbeit adressiert die Herausforderung, eine fragile Flugmaschine in ein zuverlässiges, energiesparendes Inspektionswerkzeug zu verwandeln.
Von schwebenden Robotern zu wandklammernden Spähern
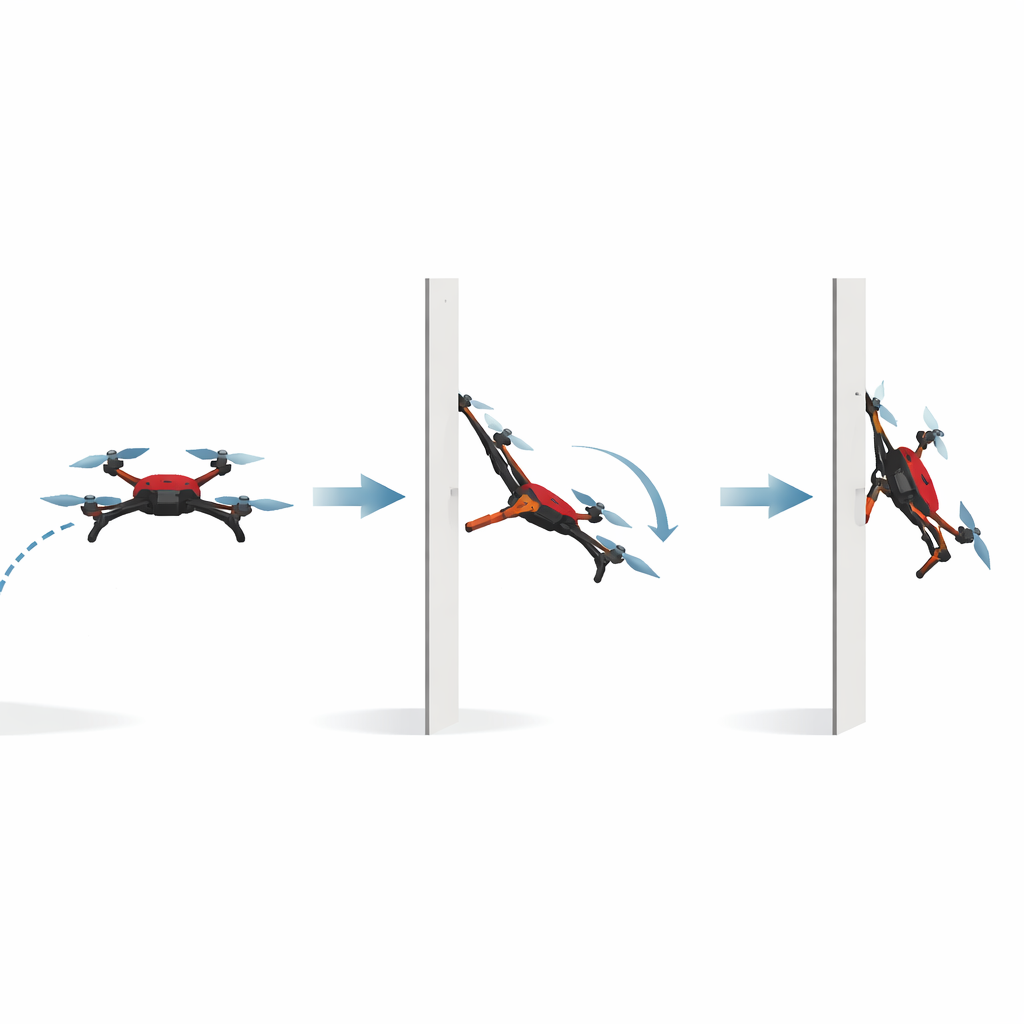
Kleine Vierrotor‑Drohnen, sogenannte Quadrotoren, werden bereits für Kartierung, Bauwerksprüfungen, Wildtierüberwachung und Präzisionslandwirtschaft eingesetzt. Ihre größte Einschränkung ist jedoch die Ausdauer: Schweben verbraucht viel Batterie. Das Anhaften an einer Oberfläche – etwa einer Wand, einem Pfosten oder der Unterseite einer Brücke – erlaubt es der Drohne, die meisten Motoren abzuschalten und dennoch Sensoren für eine langfristige Beobachtung an Ort und Stelle zu behalten. Das sicher durchzuführen ist alles andere als trivial. Während des kurzen, aber kritischen Perching‑Manövers muss die Drohne die Wand anfliegen, berühren und in eine nasesenke Lage drehen, ohne abzustoßen, wegzurutschen oder die Kontrolle bei unerwarteten Böen oder Modellfehlern zu verlieren.
Die Herausforderung einer sauberen Wandlandung
Die Autoren betrachten einen Quadrotor mit einem leichten Stützarm an der Front, der als physischer Kontaktpunkt zur Wand dient. Während der Übergang vom freien Flug zum Kontakt erfolgen, sind seine Lage (seitlich, vorwärts, hoch‑runter) und seine Orientierung (Roll‑, Nick‑, Gierwinkel) eng gekoppelt: Eine Änderung der Orientierung verändert, wie Schub in Bewegung umgesetzt wird, und die plötzliche Reaktionskraft der Wand kann den Rumpf verdrehen. Hinzu kommen reale Effekte – wie aerodynamische Wechselwirkungen nahe der Wand, kleine Fertigungsungenauigkeiten und Sensorrauschen – die als unbekannte Störungen wirken. Bestehende robuste Regeltechniken können Drohnen stabil halten, neigen aber oft zu hochfrequentem „Chattering“ in den Motorbefehlen, was die Hardware beansprucht und meist nur ein schrittweises Schrumpfen der Fehler statt eine garantierte Konvergenz innerhalb eines vorhersehbaren, kurzen Zeitfensters sicherstellt.
Eine klügere Methode zum Ausbalancieren und Anpassen
Um diese Probleme zu überwinden, führt das Papier ein adaptives, zweiter Ordnung stetiges Regelungsschema (ASOCC) ein. Vereinfacht gesagt berücksichtigt der Regler nicht nur, wie groß die Abweichung der Drohne vom Soll ist, sondern auch, wie schnell sich dieser Fehler verändert, und formt seine Befehle so, dass beides innerhalb einer endlichen Zeit auf null geht. Ein integrierter Störgrößenbeobachter fungiert wie ein Echtzeit‑„Geräusch‑Zuhörer“: Er schätzt die Nettowirkung unbekannter Kräfte und Modellabweichungen und speist diese Information zurück in die Regelgesetzgebung. Wichtig ist, dass die Verstärkungswerte, die bestimmen, wie stark der Regler reagiert, dynamisch anhand dieser Schätzungen angepasst werden, statt vorab festgelegt zu sein. Da die Steuersignale sich stetig ändern statt abrupt umzuschalten, reduziert das Design wesentlich das Chattering bei gleichzeitiger Beibehaltung hoher Robustheit.
Erprobung der neuen Regelung
Die Forschenden analysieren zunächst die Mathematik des Beobachter‑Regler‑Paares und beweisen mithilfe energienaher Lyapunov‑Funktionen, dass alle Bewegungsfehler trotz begrenzter Störungen innerhalb einer endlichen Zeit gegen null konvergieren. Anschließend simulieren sie aggressive Perching‑Szenarien in Software, wobei das Drohnenmodell Wind‑ähnlichen Kräften, zufälligem Messrauschen und absichtlichen Fehlern in seinen physikalischen Parametern ausgesetzt wird. In diesen Versuchen führte ASOCC die Drohne durch drei Phasen – Vorbereitung, Annäherung und Anhaften – und hielt Lage‑ und Orientierungsfehler klein sowie die Steuerbefehle glatt. Gegenüber mehreren fortgeschrittenen Alternativen, darunter populäre Sliding‑Mode‑ und modellbasierte Regler, reduzierte die neue Methode zentrale Tracking‑Fehlermaße um etwa 35–55 Prozent.
Von der Simulation zur realen Drohne an der Wand
Über die Simulationen hinaus baute das Team einen miniaturisierten Perching‑Quadrotor auf Basis einer kommerziellen Flugsteuerung und eines 3D‑gedruckten Rahmens mit Frontarm. In Indoor‑Versuchen flog die Drohne autonom auf eine geneigte Wand zu, stieg auf etwa einen Meter Höhe und neigte sich dann nasesenke, um Kontakt aufzunehmen und angeheftet zu bleiben. Zeitreihen zeigen, dass Höhe, horizontale Position und Nickwinkel ihren Sollverläufen eng folgen, mit nur kleinen Schwankungen durch Sensorrauschen. Trotz kostengünstiger Hardware, Kommunikationsverzögerungen und Aktuatoreinschränkungen prallte die Drohne nach dem Aufprall nicht ab und schwang nicht nach, was zeigt, dass ASOCC den rauen Flugalltag bewältigen kann.
Was das für zukünftige fliegende Inspektoren bedeutet
Für Nicht‑Fachleute ist das zentrale Ergebnis einfach: Diese Arbeit liefert eine Regelungsstrategie, die kleinen Drohnen erlaubt, verlässlich an vertikalen Flächen haften zu bleiben, selbst wenn die Bedingungen nicht perfekt sind. Durch die Kombination von glatt verlaufender, aber stark korrigierender Regelung mit einem adaptiven Störgrößenbeobachter ermöglicht die Methode schnelles, präzises Perching ohne das Zittern und die Hardwarebelastung vieler robuster Regler. Das öffnet die Tür zu Langzeit‑Luftüberwachung mit leichteren Batterien, einfacheren Plattformen und größerer Sicherheit – ein wichtiger Schritt in Richtung Flotten autonomer „wandklammernder“ Roboter, die stillschweigend Infrastruktur, Felder und natürliche Lebensräume überwachen.
Zitation: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Schlüsselwörter: Quadrotor Landung, adaptive Regelung, Drohneninspektion, Störgrößenbeobachter, Luftrobotik