Clear Sky Science · de
Entwicklung eines intelligenten Patientenbetreuungsroboters mit verbesserter autonomer Navigation durch Pfadoptimierung in Krankenhausfluren
Roboter, die Pflegekräfte unterstützen, nicht ersetzen
Krankenhäuser weltweit stehen unter Druck: mehr ältere Patientinnen und Patienten, mehr chronische Erkrankungen und ein Personal, das an seine Grenzen gelangt. Diese Studie beschreibt einen intelligenten Patientenbetreuungsroboter, der nicht die Pflege übernehmen soll, sondern leise repetitive Überwachungsaufgaben und nächtliche Kontrollen auf Stationen erledigt. Indem er sich selbstständig sicher und zuverlässig bewegt, könnte dieser Roboter Pflegekräfte dabei helfen, Notfälle schneller zu erkennen – etwa Stürze oder plötzliche Fieber – während er ihre Arbeitsbelastung verringert und das Unfallrisiko in überfüllten Fluren und engen Türdurchgängen senkt.
Warum Krankenhausflure für Roboter schwierig sind
Auf den ersten Blick wirken Krankenhausflure einfach: gerade Linien, saubere Böden, regelmäßige Türen. Für einen Roboter ist das alles andere als trivial. Betten, Wagen, Wände und besonders schmale Türrahmen schaffen enge Räume, in denen schon kleine Fehler zu Kollisionen führen können. Viele existierende Krankenhausroboter verlassen sich auf einen Sensor-Mix und komplexe Hardware, um damit zurechtzukommen. Das Team dieser Studie ging einen anderen Weg: Es entwickelte einen Roboter, der sich sicher bewegen kann, indem er nur einen Hauptsensor verwendet – einen zweidimensionalen Laserscanner, der Entfernungen rundum misst – und eine intelligentere Routenplanung.

Das zusätzliche Augenpaar für die Pflegekraft
Die Forschenden bauten einen smarten Patientenbetreuungsroboter (SPCR) auf einer handelsüblichen lenkbaren Basis auf. Auf dem Gehäuse montierten sie eine 3D-Kamera, um Stürze zu erkennen und Vitalzeichen berührungslos abzulesen, sowie einen 2D-Lasersensor obenauf, der die Umgebung kontinuierlich im vollen Kreis scannt. Im Inneren befinden sich ein eingebetteter Computer, Batterien, Motorcontroller und Kommunikationselektronik, die es dem Roboter erlauben, mit einer Steuerungs-App zu kommunizieren und eigene Fahrentscheidungen zu treffen. Der Roboter kann sich in alle Richtungen bewegen, einen Kamerarm neigen, um Patientinnen und Patienten anzusehen, und ist so ausgelegt, dass er über mehrere Stunden unter realen Krankenhausbedingungen betrieben werden kann.
Eine klügere Karte statt mehr Hardware
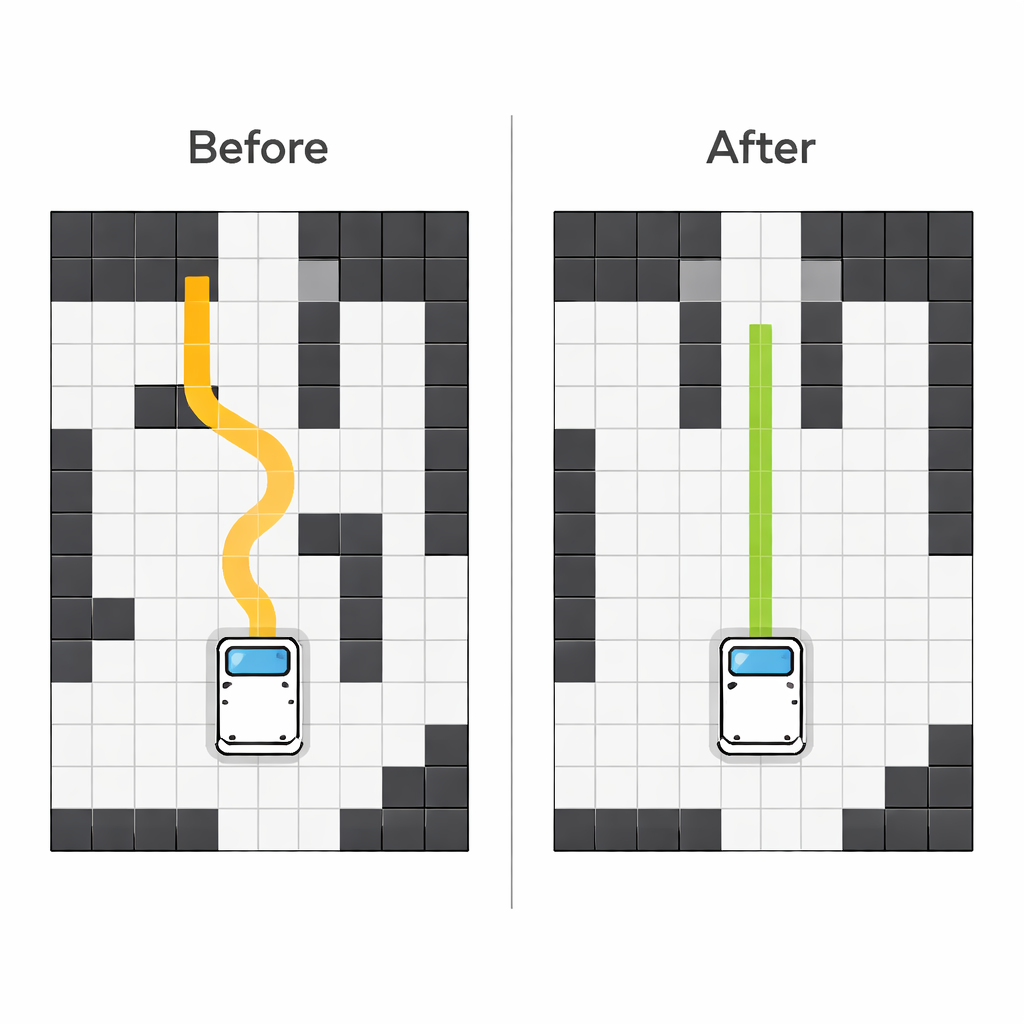
Zur Navigation benötigt der Roboter zunächst eine Karte, die markiert, wo er sich bewegen darf und wo nicht. Das Team begann mit präzisen Zeichnungen eines Krankenhausflurs und wandelte diese in eine rasterbasierte Karte um, in der jedes winzige Quadrat als Freifläche, Wand oder Hindernis gekennzeichnet ist. Anstatt die Karte unverändert zu lassen, passten sie sie so an, dass sie konservativer als die Realität ist. Sie führten „virtuelle Hinderniszonen“ ein – zusätzliche gesperrte Bereiche, die den Roboter sanft von riskanten Stellen wie Türkanten und engen Ecken wegdrängen. Die Pfadplanungssoftware, basierend auf einer weiterentwickelten Version des D* Lite-Algorithmus, sucht dann in dieser sichereren Karte nach Routen, die scharfe Drehungen vermeiden und den Roboter eher in der Mitte schmaler Durchgänge halten.
Erprobung des Roboters in echten Stationen
Das System wurde in einem tatsächlichen Krankenhausflur getestet, der in drei Abschnitte mit unterschiedlichen Kombinationen aus Gängen, Türen und Hindernissen unterteilt war. Der Roboter musste zwischen Kontrollpunkten fahren, durch standardmäßige 90-Zentimeter-Türen passieren und Wände sowie feste Gegenstände umgehen. Da der Roboter selbst etwa 76 Zentimeter breit ist, hatte er beim Durchqueren der Türen nur wenige Zentimeter Abstand an beiden Seiten – Bedingungen, bei denen viele Roboter Probleme haben. Im Vergleich der Leistung vor und nach der Anpassung der Rasterkarte stellten die Forschenden fest, dass die Erfolgsrate, Routen ohne Berührung abzuschließen, in allen Abschnitten um mehr als 30 Prozent stieg, begleitet von gleichmäßigeren Fahrten und weniger unnötigen Manövern.
Was das für die zukünftige Patientenversorgung bedeutet
Für Nichtfachleute ist die Kernbotschaft einfach: Anstatt Roboter mit immer mehr Sensoren zu überfrachten, zeigt diese Studie, dass sorgfältiges digitales Kartendesign und klügere Routenplanung Krankenhausroboter sowohl sicherer als auch praktikabler machen können. Ein Roboter, der nachts zuverlässig durch enge Türen gleitet, effiziente Wege folgt und leise grundlegende Patientenwerte überprüft, könnte Pflegekräfte entlasten, damit diese sich auf menschliche Aufgaben konzentrieren – Familien trösten, komplexe Entscheidungen treffen und Notfälle bewältigen. Die Autorinnen und Autoren sehen diese Arbeit als Grundlage: Zukünftige Versionen werden mehr Sensoren und umfangreichere Patientenüberwachungsfunktionen integrieren, mit dem Ziel verlässlicher rund-um-die-Uhr-robotischer Assistenten, die sich sicher in realen Krankenhausumgebungen bewegen.
Zitation: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Schlüsselwörter: Krankenhausroboter, autonome Navigation, Patientenüberwachung, LiDAR-Kartierung, Pfadplanung