Clear Sky Science · de
Durch Verstärkungslernen gesteuerte modellprädiktive Regelung zur Optimierung eines gegenläufigen permanentmagneterregten Synchronmotors im U-Boot-Antriebssystem
Intelligentere Motoren für unauffälligere U-Boote
Moderne U-Boote sind auf leise, effiziente Antriebe angewiesen, um die Ozeane zu erkunden und wissenschaftliche, kommerzielle oder militärische Missionen durchzuführen. Diese Studie untersucht eine spezielle Art von Elektromotor, der zwei Propeller in entgegengesetzte Richtungen antreibt und so einem U-Boot hilft, ruhig und geräuscharm durchs Wasser zu gleiten. Die Forschenden zeigen, wie die Kombination fortschrittlicher Vorhersageverfahren mit einem Lernalgorithmus diese Motoren stabil und effizient halten kann, selbst wenn Wellen, Strömungen oder plötzliche Manöver stören.
Zwei Propeller, ein stabiles U-Boot
Herkömmliche Einzelpropeller-Systeme können ein U-Boot verdrehen und rollen lassen, vor allem bei hohen Geschwindigkeiten, was die Steuerung erschwert und die Entdeckungschance erhöht. Um das zu vermeiden, verwenden Ingenieure gegenläufige Propellersysteme: zwei Propeller auf derselben Welle, die in entgegengesetzte Richtungen rotieren. Im Zentrum dieser Bauweise steht der gegenläufige permanentmagneterregte Synchronmotor (CRPMSM), der im Wesentlichen aus zwei kompakten, drehmomentstarken Elektromotoren besteht, die übereinander angeordnet sind. Diese Anordnung hebt unerwünschte Verdrehkräfte auf, verbessert die Energieeffizienz und reduziert Geräusche — allesamt entscheidend für Tarnung und lange Einsätze unter Wasser. Wenn jedoch die Belastung der beiden Rotoren unausgeglichen wird, etwa durch turbulentes Wasser oder scharfe Kurven, wird es zu einer ernsten Regelungsaufgabe, beide Seiten perfekt synchron zu halten. 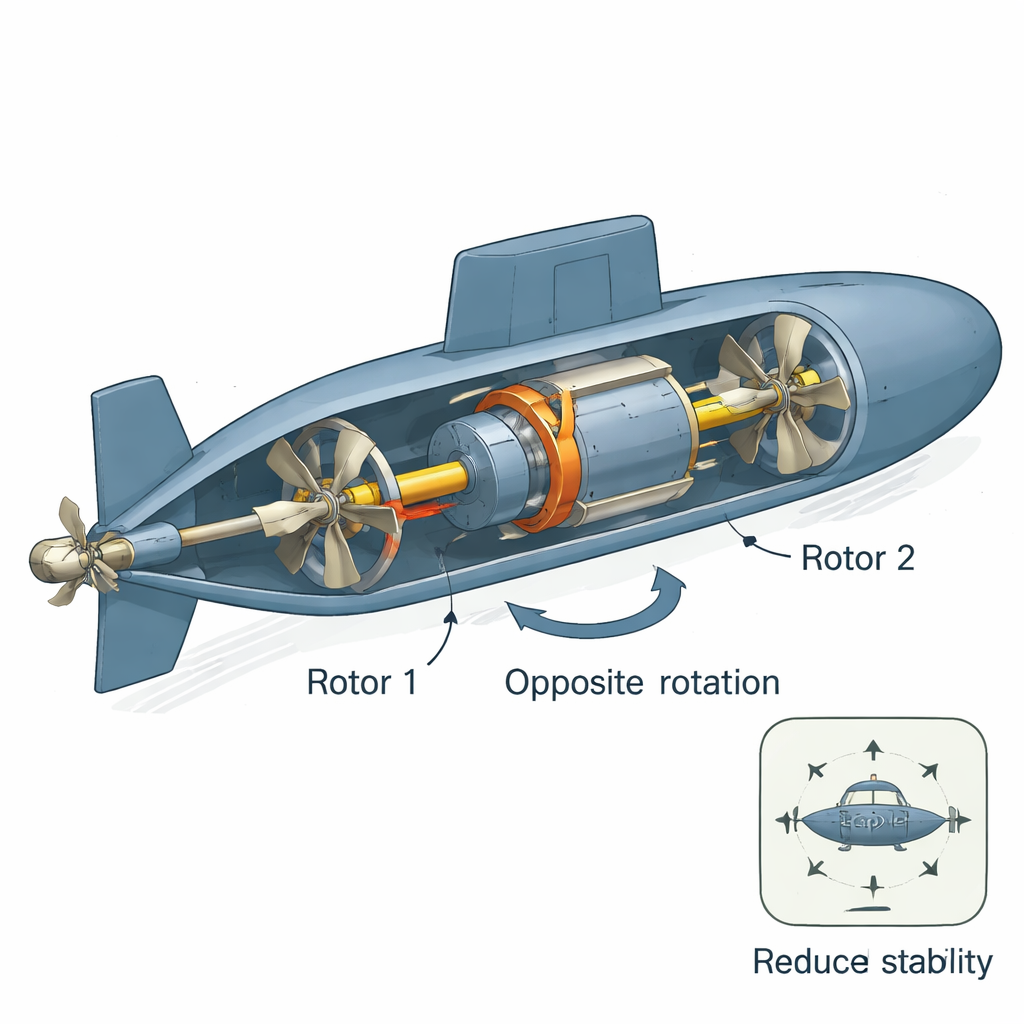
Warum konventionelle Regelungen nicht ausreichen
Ingenieure haben viele Regelungsstrategien versucht, um CRPMSM-Rotoren synchron und effizient zu halten. Verfahren wie feldorientierte Regelung und Direktmomentenregelung funktionieren unter ruhigen, berechenbaren Bedingungen gut, geraten aber an ihre Grenzen, wenn sich die Unterwasserumgebung schnell ändert oder sehr ungleichmäßig wird. Komplexere Techniken wie Sliding-Mode-, Fuzzy- und adaptive Regelungen erhöhen die Robustheit, setzen jedoch oft sehr genaue mathematische Modelle des Motors und der umgebenden Wasserbedingungen voraus. In der Praxis sind solche Modelle nie perfekt, und Abweichungen können zu erhöhten Drehmomentwelligkeiten, langsamerer Erholung nach Störungen und Energieverschwendung führen. Modellprädiktive Regelung (MPC), die optimale Stellgrößen über ein kurzes Zukunftsfenster plant, bietet zwar schnelle Reaktionen, bleibt aber stark von der Qualität des zugrundeliegenden Modells abhängig.
Ein hybrider Regler, der dazulernt
Die Autorinnen und Autoren schlagen ein hybrides, durch Verstärkungslernen unterstütztes modellprädiktives Regelungsframework (RL-MPC) vor, das die Stärken beider Ansätze vereint. MPC nutzt ein mathematisches Modell des CRPMSM, um vorherzusagen, wie Ströme, Drehmoment und Drehzahl in den nächsten Regelzeitpunkten verlaufen, und wählt Spannungsbefehle, die die gewünschten Drehzahl- und Stromvorgaben unter Einhaltung von Beschränkungen nachbilden sollen. Darüber hinaus beobachtet ein durch den Twin Delayed Deep Deterministic Policy Gradient (TD3) implementierter Verstärkungslernagent das reale Motorverhalten. Indem er Belohnungen erhält, wenn Drehzahlfehler, Stromabweichungen und Stellaufwand gering sind, passt der Lernagent schrittweise die MPC-Ausgänge an, um Modellfehler, unausgewogene Lasten und äußere Störungen zu kompensieren. Eine Raumzeiger-Pulsweitenmodulationsstufe wandelt diese optimierten Spannungsbefehle anschließend in Schaltsignale für den Wechselrichter, der den Motor antreibt.
Der intelligente Motor im Test
Um ihren Ansatz zu bewerten, bauten die Forschenden eine detaillierte Simulation eines 120-kW-gegenläufigen Motorsystems in MATLAB/Simulink und prüften es unter drei realistischen Betriebsfällen. Im ersten lief der Motor mit konstanter Drehzahl, während die Last auf beiden Rotoren sich änderte, aber ausgeglichen blieb; im zweiten wurde die Drehzahl bei konstanter Last variiert; im dritten, dem anspruchsvollsten Fall, erfuhren die Rotoren unterschiedliche Lasten bei festem Drehzahlsollwert. In jedem Szenario wurde RL-MPC direkt mit herkömmlichem MPC verglichen, wobei dieselben Vorhersage- und Regelhorizonte verwendet wurden. 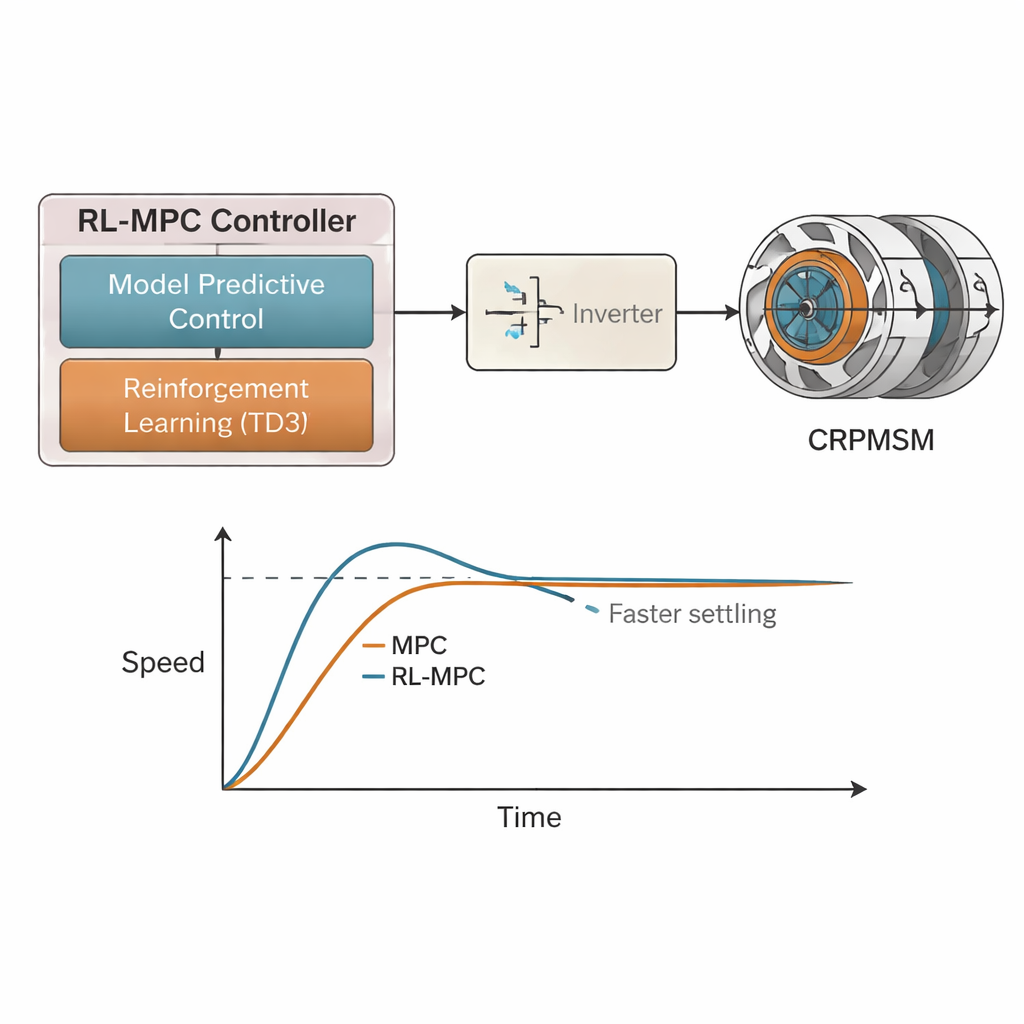
Schnellere Reaktion, sauberere Ströme, bessere Synchronisation
Der hybride RL-MPC-Regler übertraf in allen Tests konstant den Standard-MPC. Bei plötzlichen Änderungen von Lasten oder Drehzahlen verringerte RL-MPC die Überschwinger der Drehzahl von etwa 30 % auf rund 15–16,6 % und halbierte die Einschwingzeit von etwa 1,4 Sekunden auf 0,7 Sekunden. Die Drehmomentwelligkeiten waren geringer, und die beiden gegenläufigen Rotoren blieben eng synchronisiert, selbst wenn ein Rotor stärker belastet war als der andere. Ebenso wichtig verbesserte sich die Qualität der Statorströme deutlich: die Gesamtklirrfaktor (THD) sank während harter, unausgeglichener Lasttransienten um mehr als 60 %, von 9,3 % beim MPC auf 3,4 % beim RL-MPC und erreichte im stationären Betrieb Werte von etwa 2–3 %. Sauberere Ströme bedeuten geringere Erwärmung, leiseren Betrieb und höhere Gesamteffizienz.
Was das für zukünftige Unterwasserfahrzeuge bedeutet
Für Nicht-Spezialisten lautet die Kernbotschaft, dass eine zusätzliche Lernschicht über einem prädiktiven Regler U-Boot-Motoren sowohl intelligenter als auch robuster macht. Anstatt sich ausschließlich auf starre Gleichungen zu stützen, die bei rauer See oder scharfen Manövern versagen können, kann das RL-MPC-Framework sich in Echtzeit anpassen und den Dualrotor-Motor synchron, reaktionsschnell und effizient halten. Obwohl die bisherigen Ergebnisse auf Simulationen beruhen und noch in realer Hardware und auf offener See validiert werden müssen, weist diese Arbeit auf zukünftige Unterwasserfahrzeuge hin, die mit derselben Energiemenge weiter fahren, weniger Lärm erzeugen und auch unter schwierigen Bedingungen stabiler und kontrollierbarer bleiben.
Zitation: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Schlüsselwörter: U-Boot-Antrieb, gegenläufiger Motor, Verstärkungslernregelung, modellprädiktive Regelung, Unterwasserfahrzeuge