Clear Sky Science · de
Ein gemeinsamer Schätzer für Entfernung–Winkel–Geschwindigkeit bei FDA-MIMO-Radar auf Basis der Graphen-Signalverarbeitung
Intelligenteres Radar für eine überfüllte, laute Welt
Von selbstfahrenden Autos bis zur Flugverkehrsüberwachung stützt sich die moderne Gesellschaft stark auf Radarsysteme, die Objekte schnell und zuverlässig finden und verfolgen können. Da Himmel, Straßen und elektromagnetische Spektren immer dichter genutzt werden, muss Radar mehrere bewegte Ziele in Gegenwart starker Störungen und Rauschanteile auseinanderhalten. Dieser Beitrag stellt einen neuen Ansatz vor, mit dem eine leistungsfähige Radarbauweise — sogenannte FDA-MIMO-Radare — räumlich dreidimensional (Entfernung, Richtung und Geschwindigkeit) besser „sehen“ kann, indem Werkzeuge aus einem aufstrebenden Gebiet, der Graphen-Signalverarbeitung, verwendet werden.
Warum diese neue Radararchitektur wichtig ist
Konventionelle Phased-Array-Radare richten ihre Strahlen vor allem über den Winkel aus, ähnlich wie eine Taschenlampe, die nach links und rechts gedreht wird. Frequency Diverse Array (FDA)-Radare arbeiten anders: Jedes Antennenelement sendet mit einer leicht unterschiedlichen Frequenz. Diese kleine Veränderung bewirkt, dass das Strahlmuster nicht nur vom Winkel, sondern auch von der Entfernung und der Zeit abhängt. In Kombination mit Multiple-Input Multiple-Output-(MIMO-)Techniken können FDA-MIMO-Radare theoretisch den Aufenthaltsort eines Ziels in drei Dimensionen bestimmen: wie weit es entfernt ist, in welchem Winkel es liegt und wie schnell es sich bewegt. Die Herausforderung besteht darin, all diese Informationen schnell und präzise aus den Roh-Echos zu extrahieren, insbesondere wenn viele Ziele vorhanden sind und die Signale im Rauschen versinken.
Radar-Echos als Netzwerkproblem denken
Die Autorinnen und Autoren gehen dieses Problem an, indem sie die Radar-Messungen als Signale auffassen, die auf einem Graphen — einem Netzwerk aus Knoten und Kanten — leben. Jeder Knoten in diesem Graphen repräsentiert ein bestimmtes Send-Empfang-Antennenpaar im FDA-MIMO-Array, und die Kanten erfassen, wie Signale benachbarter Knoten räumlich zusammenhängen. Durch sorgfältige Definition dieser Verbindungen konstruieren sie eine „Adjazenzmatrix“, die beschreibt, wie Echos über das Array propagieren sollten, wenn sich ein Ziel in einer gegebenen Entfernung und Richtung befindet. Wenn das angenommene Entfernungs–Winkel-Paar mit dem realen Ziel übereinstimmt, stimmt das gemessene Echo-Muster nahezu perfekt mit einem der natürlichen Schwingungsmodi des Graphen überein. Praktisch bedeutet das, dass nach einer graphbasierten Version der Fourier-Transformation die Energie in einer sehr scharfen Spitze bei einer einzigen Spektralkomponente kollabiert. Der Algorithmus sucht nach solchen Spitzen über ein Raster von Entfernungs- und Winkelwerten, um die Lage der Ziele zu bestimmen. 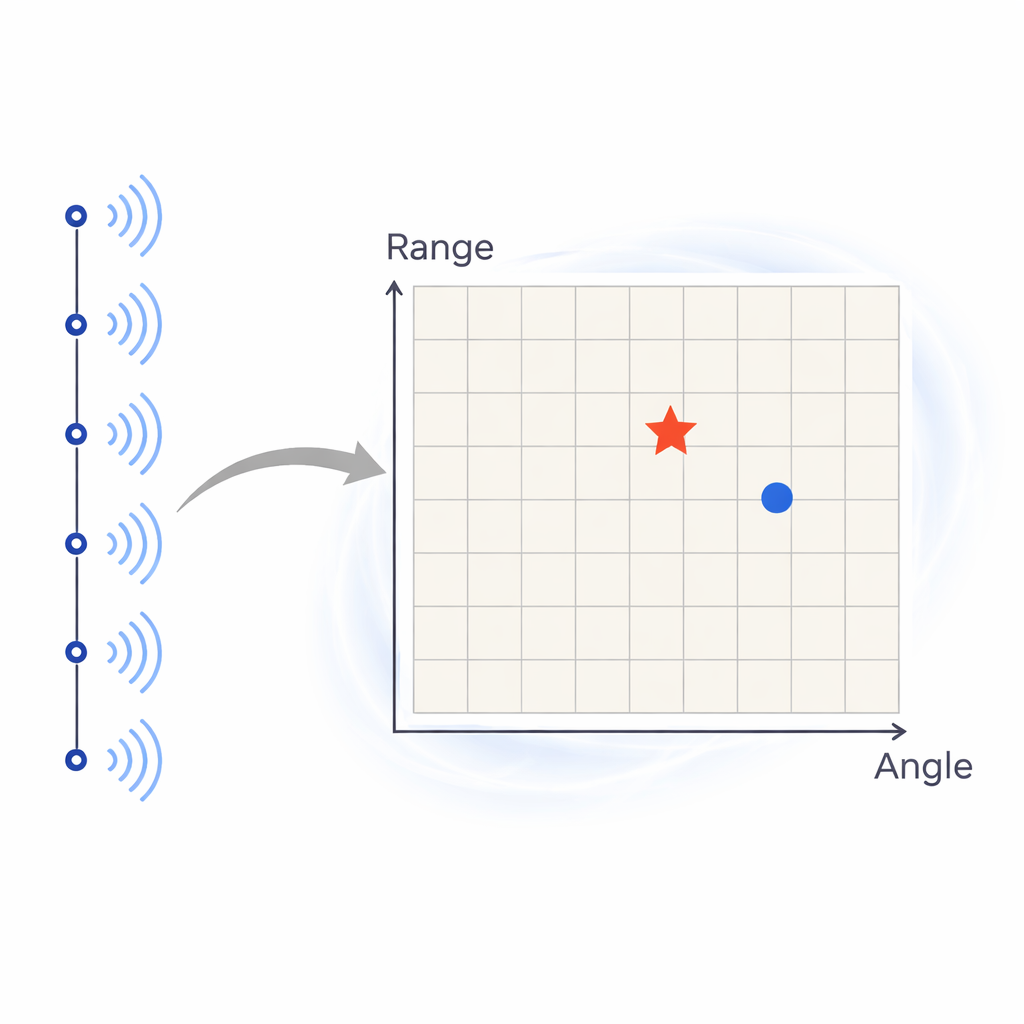
Bewegung hinzufügen: Geschwindigkeit mit derselben Idee messen
Um die Geschwindigkeit eines Ziels zu schätzen, erweitert die Methode das Graphenkonzept in die Zeitdimension über mehrere Radarimpulse. Jetzt repräsentiert jeder Knoten einen Puls in der Zeit, und die Kanten verbinden benachbarte Pulse in einer Schleife, um zu erfassen, wie sich das Signal entwickeln sollte, wenn das Ziel eine bestimmte Radialgeschwindigkeit hat. Wieder gilt: Wenn die angenommene Geschwindigkeit mit der tatsächlichen übereinstimmt, zeigt das transformierte Signal einen konzentrierten Peak im Spektralbereich des Graphen. Der Algorithmus durchläuft Kandidatengeschwindigkeiten und sucht nach der stärksten Spitze. Entscheidend ist, dass die Autoren ihr Framework so gestalten, dass Entfernung–Winkel-Schätzungen aus dem räumlichen Graphen und Geschwindigkeitsabschätzungen aus dem zeitlichen Graphen sich gegenseitig verstärken. Daten aller Antennen und aller Pulse werden kombiniert und bilden eine mehrdimensionale Struktur, die die Genauigkeit verbessert, ohne Arbeit zu wiederholen. 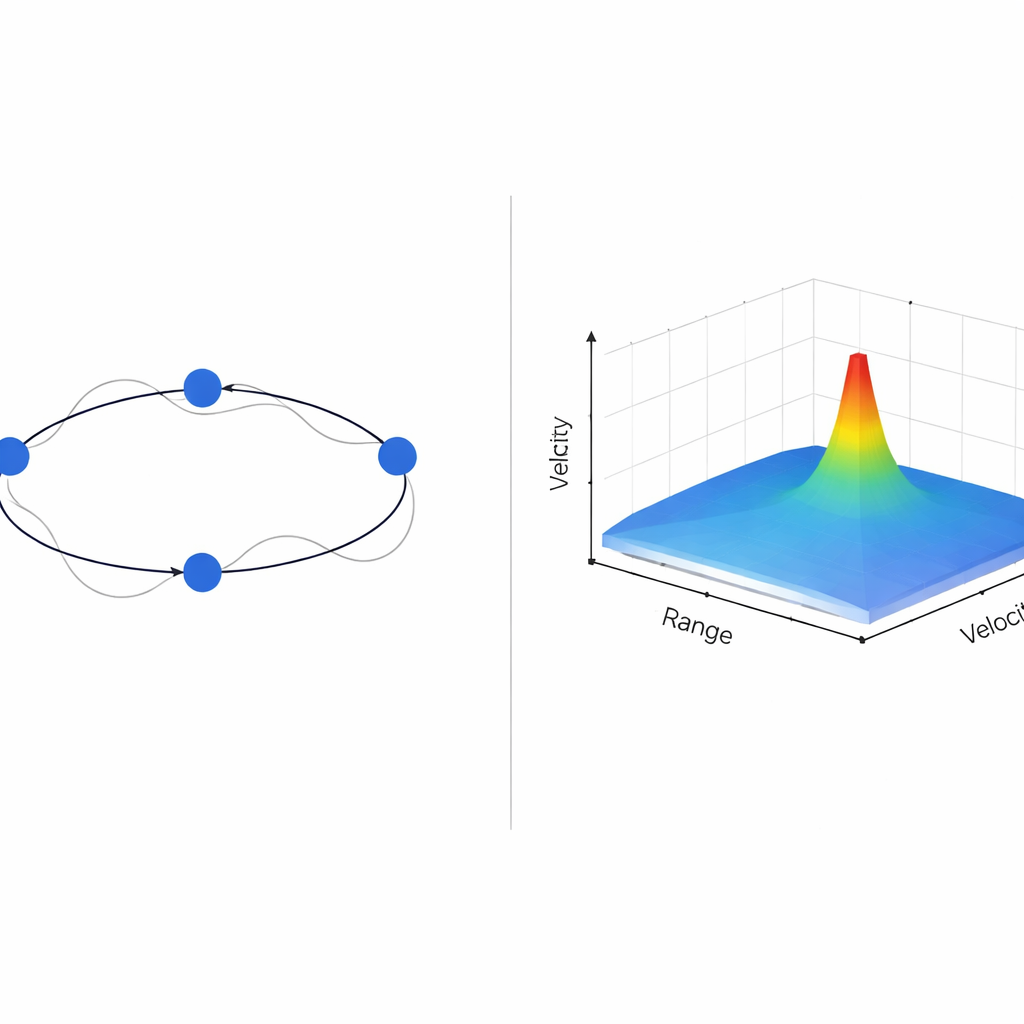
Prüfung der Methode
In einer Reihe von Simulationen vergleichen die Forschenden ihren graphbasierten Ansatz mit einer weit verbreiteten Hochpräzisionsmethode namens MUSIC. Sie testen Szenarien mit einem und mehreren Zielen, untersuchen, wie gut jede Methode nahe beieinanderliegende Objekte voneinander trennt, und betrachten die Leistung, wenn die Signale im Verhältnis zum Rauschen sehr schwach sind. Der graphbasierte Algorithmus erreicht eine ähnlich insgesamt zu bewältigende Rechenlast wie klassische Verfahren, bietet jedoch schärfere Auflösung in Entfernung, Winkel und Geschwindigkeit. Er ist besonders effektiv darin, durch Rauschen verursachte Fehlspitzen zu unterdrücken, was zu saubereren, zuverlässigeren Zielkarten führt. Selbst bei schlechter Signal-Rausch-Situation — Bedingungen, bei denen viele traditionelle Methoden Probleme haben — hält der neue Algorithmus enge Fehlerschranken für Ort und Geschwindigkeit der Ziele ein.
Was das für Radar in der Praxis bedeutet
Einfach gesagt zeigt diese Arbeit, wie die Betrachtung von Radardaten als Netzwerk intelligenteres Processing ermöglicht, das reale Ziele klarer von Störquellen trennt. Für Anwendungen von Verteidigung und Flugverkehrskontrolle bis hin zu Fahrzeugsicherheit und Umweltsensorik verspricht die vorgeschlagene Technik eine genauere Verfolgung mehrerer bewegter Objekte unter schwierigen Bedingungen, ohne unrealistisch hohe Rechenressourcen zu benötigen. Durch die Verbindung fortschrittlicher Antennengestaltung mit graphenbasierter Mathematik demonstrieren die Autorinnen und Autoren einen praktischen Weg zu Radaren, die weiter, schärfer und verlässlicher in einer zunehmend komplexen elektromagnetischen Umgebung sehen.
Zitation: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
Schlüsselwörter: Radarerfassung, Zielverfolgung, Signalverarbeitung, Graphen-Signalverarbeitung, FDA-MIMO