Clear Sky Science · de
Sensorlose Vollgeschwindigkeits-Regelstrategie für PMSM basierend auf verbessertem Super-Twisting-Gleitmodusbeobachter und sanfter Übergangsoptimierung
Elektromotoren intelligent halten ohne zusätzliche Hardware
Von Elektroautos bis zu Aktoren in Flugzeugen verlassen sich viele moderne Maschinen auf eine besondere Art von Elektromotor, den Permanentmagnet-Synchronmotor (PMSM). Diese Motoren sind effizient und leistungsstark, benötigen aber in der Regel empfindliche Sensoren, um Drehzahl und Rotorlage zu erfassen. Sensoren erhöhen die Kosten und können in rauer Umgebung ausfallen. Diese Studie untersucht, wie sich diese Motoren über den gesamten Drehzahlbereich hinweg glatt und genau betreiben lassen, ohne mechanische Sensoren zu verwenden.
Warum es so schwer ist, Sensoren loszuwerden
In einem typischen PMSM-Antrieb sind kleine Lagesensoren an der Motorwelle angebracht, die dem Regelkreis genau mitteilen, wo sich der Rotor befindet. Diese Information ist entscheidend, um die Ströme zu genau dem richtigen Zeitpunkt in die Wicklungen zu treiben — wie ein sorgfältig getimter Schubs auf ein Karussell. Sensoren können jedoch zerbrechlich, sperrig und teuer sein. Ingenieure versuchen seit langem, sie durch „sensorlose“ Verfahren zu ersetzen, die die Rotorlage aus den elektrischen Signalen des Motors ableiten. Der Haken ist, dass keine einzelne Methode bei allen Drehzahlen gut funktioniert. Bei niedriger Drehzahl sind die üblichen elektrischen Hinweise schwach, während einfache Tricks bei hoher Drehzahl rauschhaft und ungenau werden. Diese Lücke ohne Ruckeln, Vibrationen oder Kontrollverlust zu schließen, ist eine anhaltende Herausforderung.
Zwei clevere Wege, dem Motor zuzuhören
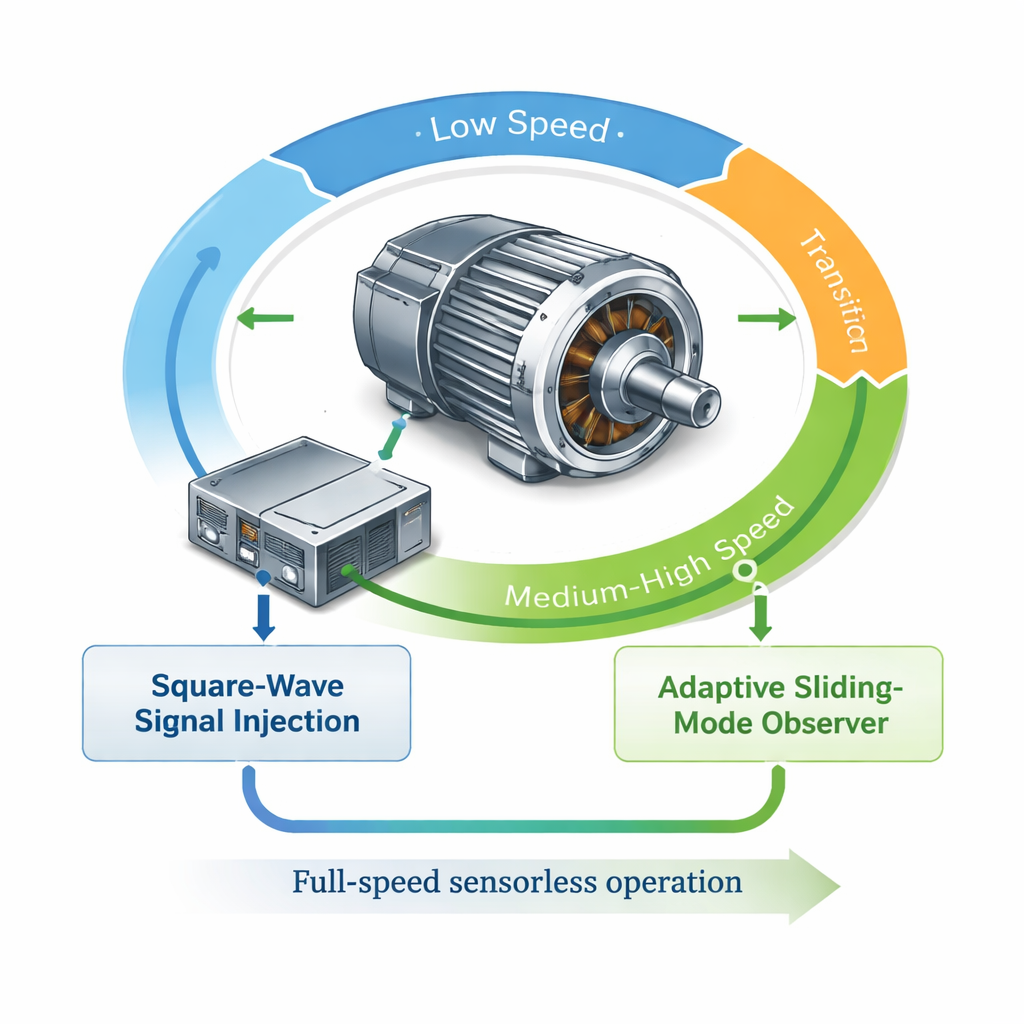
Um den gesamten Drehzahlbereich abzudecken, kombinieren die Autoren zwei sich ergänzende sensorlose Techniken. Bei niedrigen Drehzahlen, wo das natürliche elektrische Rücksignal des Motors zu schwach ist, injizieren sie absichtlich ein schnelles, quadratförmiges Spannungssignal in die Wicklungen. Der Motor reagiert abhängig vom Rotorwinkel unterschiedlich, sodass der Regler anhand des resultierenden hochfrequenten Stroms den Rotorwinkel ableiten kann. Dieser Ansatz der „Hochfrequenzinjektion“ wirkt wie das Aussenden eines sanften Sondensignals und das Lesen des Echos. Bei mittleren und hohen Drehzahlen erzeugt der Motor stärkere natürliche Rückkopplungen, die als Gegen- elektromotorische Kraft (Back-EMF) bekannt sind. Hier verwendet das Team einen fortgeschrittenen mathematischen Beobachter, der das Verhalten des Motors verfolgt und Lage sowie Drehzahl aus den gemessenen Spannungen und Strömen schätzt.
Den digitalen Beobachter schlauer und leiser machen
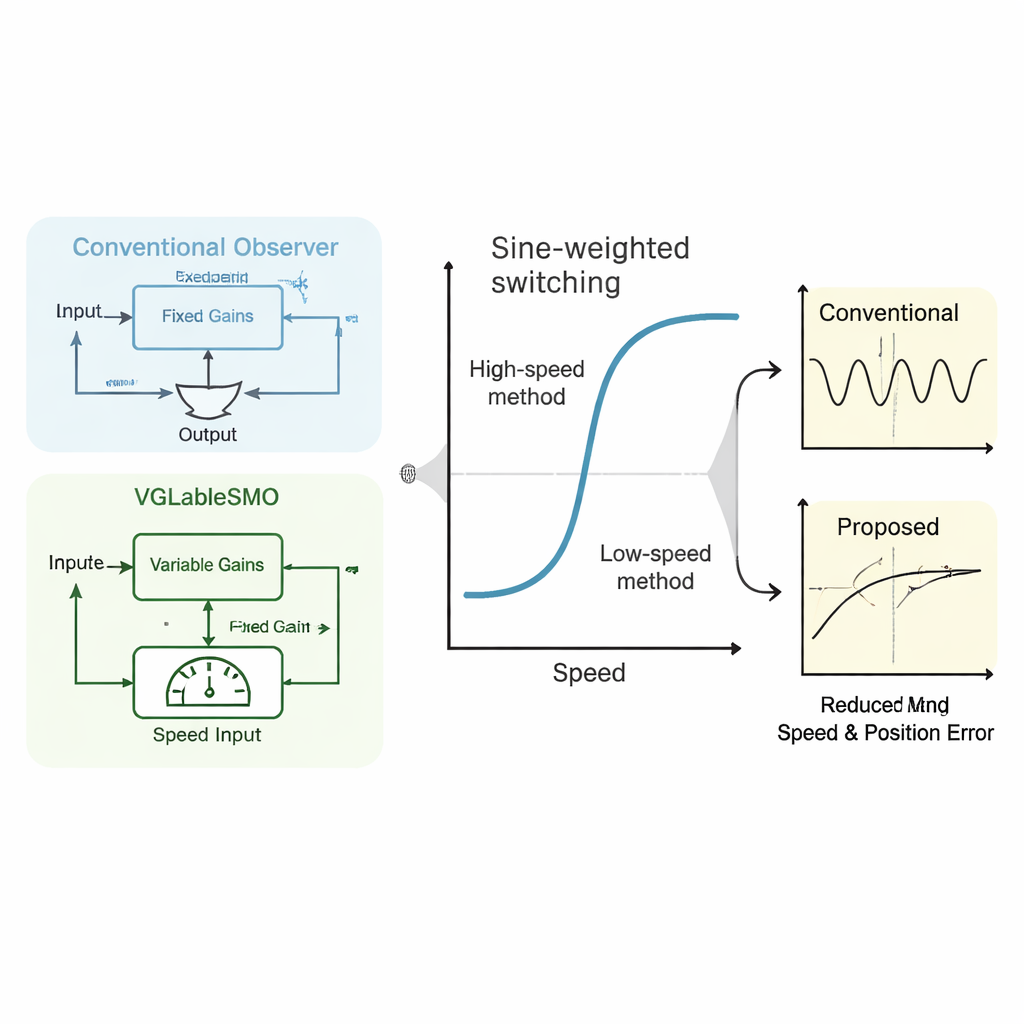
Die zentrale Neuerung auf der Hochgeschwindigkeitsseite ist ein verbesserter Beobachter namens variable-gain linearer Super-Twisting-Gleitmodus-Beobachter (VGLSTSMO). Traditionelle Gleitmodus-Beobachter sind wegen ihrer Robustheit gegenüber Störungen und Rauschen geschätzt, leiden jedoch oft unter „Chattering“, kleinen aber schnellen Schwingungen, die sich auf Drehmoment und Drehzahl auswirken können. Sie basieren außerdem auf festen internen Parametern, die in einer Betriebsbedingung gut, in einer anderen jedoch schlecht arbeiten können. Der vorgeschlagene Beobachter passt seine internen Verstärkungen automatisch an veränderliche Drehzahlen an und fügt einen Korrekturterm hinzu, der die Schätzungen sanft in Richtung der wahren Werte zieht. Ein adaptiver Mechanismus verfeinert zusätzlich die Schätzung der internen Motorenspannung, was die Genauigkeit von Drehzahl und Lage verbessert. Computersimulationen zeigen, dass dieser intelligentere Beobachter den Lagefehler bei mittleren bis hohen Drehzahlen von etwa 0,9 Radiant auf rund 0,2 Radiant reduziert und die Einschwingzeit nach einer Laständerung verkürzt.
Den Handschlag zwischen niedrigen und hohen Drehzahlen glätten
Der Betrieb mit zwei unterschiedlichen Schätzmethoden wirft ein weiteres Problem auf: Wie gelingt der sanfte Übergang zwischen ihnen beim Beschleunigen des Motors? Ein einfacher Ansatz ist, eine Methode auszublenden und die andere linear einzublenden, doch das kann immer noch Stöße in Drehmoment und Drehzahl verursachen. Die Autoren schlagen eine sanftere, sinusförmige Gewichtungsfunktion vor. Innerhalb eines gewählten Übergangsbandes verlagert das Regelungssystem schrittweise das Vertrauen von der Niedrig- zur Hochgeschwindigkeitsmethode entlang einer glatten, wellenförmigen Kurve statt einer scharfen Rampe. Dieses verfeinerte Mischverfahren verringert spürbar Drehzahlsprünge und Winkelstörungen während des Umschaltens, reduziert den transienten Winkel Fehler und halbiert die Zeit, die die Fehler zum Einschwingen benötigen.
Was das für Maschinen in der Praxis bedeutet
Insgesamt liefert die kombinierte Strategie — Motor- Sondierung bei niedriger Drehzahl, Einsatz eines adaptiven Beobachters bei höheren Drehzahlen und der Wechsel zwischen beiden mit einer sanften Sinusgewichtung — stabile und präzise Regelung über den gesamten Drehzahlbereich ganz ohne mechanische Sensoren. In Simulationen hält die vorgeschlagene Methode Überschwinger und stationäre Fehler klein und vermeidet das harte Chattering, das Lärm, Verschleiß und Unbehagen verursachen kann. Für den Alltag bedeutet das, dass Elektrofahrzeuge, industrielle Antriebe und Antriebssysteme zuverlässiger, kompakter und kostengünstiger gebaut werden könnten, während sie dennoch präzise Bewegungsregelung ohne empfindliche wellenmontierte Sensoren bieten.
Zitation: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Schlüsselwörter: sensorlose Motorsteuerung, Permanentmagnet-Synchronmotor, Gleitmodus-Beobachter, Hochfrequenz-Signalinjektion, elektrische Antriebssysteme