Clear Sky Science · de
Einfluss struktureller Parameter auf den Arbeitsraum von Delta‑Parallelrobotern und Optimierung der Pfadanpassung für das Sortieren frischer Teeblätter
Roboter treten in die Teefabrik ein
Frische Teeblätter sind empfindlich: Wird eine Knospe zerdrückt oder ein Blatt gequetscht, leidet der Geschmack des Endprodukts. Das manuelle Sortieren dieser Blätter ist jedoch ermüdend und langsam. Dieser Beitrag untersucht, wie ein schneller, leichter Industrieroboter — ein sogenannter Delta‑Roboter — so abgestimmt werden kann, dass er sich rasant und präzise über Teeförderbänder bewegt und dabei die Blätter schonend und zuverlässig handhabt.
Warum Teeblätter besondere Behandlung brauchen
Beim modernen Teeprozess ist das Sortieren frischer Blätter entscheidend für Qualität und Preis. Menschliche Arbeiter tun sich schwer, dauerhaft das Tempo und die Konsistenz über lange Schichten zu halten. Delta‑Roboter, die oft für Hochgeschwindigkeits‑Verpackungen eingesetzt werden, erscheinen deshalb als naheliegende Lösung: Sie sind steif, genau und können sehr schnelle Bewegungen ausführen. Die meisten bisherigen Konstruktionen richteten sich jedoch an generische Objekte wie Kartons oder Nüsse, nicht an fragile Teeknospen, die auf einen engen Bereich zwischen zwei Förderbändern beschränkt sind. Der „Arbeitsraum“ des Roboters — der dreidimensionale Bereich, den er erreichen kann — muss zu dieser engen Zone passen und einer spezifischen torförmigen Bewegungsfolge folgen: greifen, anheben, querbewegen und ablegen, ohne sich selbst zu behindern oder das Ziel zu verfehlen.
Wie die Form des Roboters bestimmt, wo er hinkommt
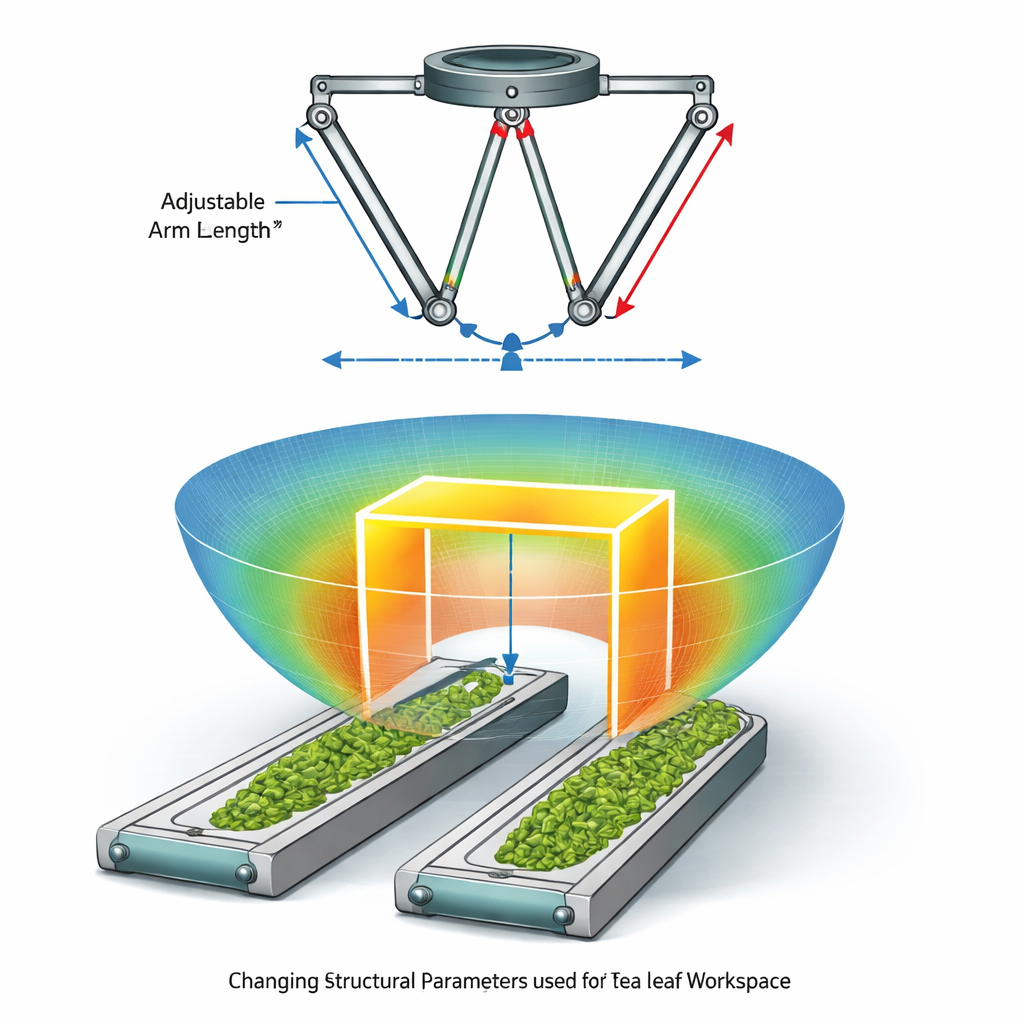
Die Autoren beginnen mit einer detaillierten mathematischen Beschreibung der Delta‑Bewegung. Sie verknüpfen die Winkel der drei Antriebsgelenke mit der exakten Position der kleinen bewegten Plattform, die einen Sauggreifer trägt. Mithilfe von Vorwärts‑ (Winkel → Position) und Invers‑ (Position → Winkel) Berechnungen definieren sie jeden Punkt, den der Endeffektor physikalisch erreichen kann, wenn die Gelenkwinkel auf einen sicheren Bereich beschränkt sind. Mit diesen Gleichungen in MATLAB simulieren sie das vollständige erreichbare Volumen und visualisieren es aus verschiedenen Blickwinkeln als farbiges, schalenförmiges Punktwolken‑Gebilde. Dieser Arbeitsraum dient dann als Grundlage dafür, zu beurteilen, ob ein gegebenes mechanisches Design den Pfad für das Teesortieren abdecken kann.
Viele Entwürfe per virtueller Experimente testen
Anstatt mehrere physische Prototypen zu bauen, behandeln die Forscher vier wichtige Geometrie‑Parameter als Stellschrauben: die Länge der oberen Arme (L), die Länge der unteren Arme (l), den Radius des festen Basisdreiecks (R) und den Radius des bewegten Dreiecks (r). Sie verwenden ein orthogonales Versuchsplan‑Layout, das Kombinationen dieser vier Parameter je drei Stufen effizient abtastet und neun virtuelle Roboter erzeugt. Für jeden berechnet das Programm das gesamte Arbeitsraum‑Volumen und zeigt, wie es sich mit einer standardisierten torförmigen Pfadbox von 200 mm Höhe, 400 mm Breite und 200 mm Tiefe überschneidet. So sehen die Forschenden nicht nur, wie groß die jeweiligen Arbeitsräume sind, sondern auch, ob sie den Bereich abdecken, in dem die Teeblätter auf den Bändern transportiert werden.
Welche Dimensionen am wichtigsten sind
Durch den Vergleich der neun simulierten Entwürfe bewertet die Studie, wie stark jede strukturelle Wahl die nutzbare Reichweite beeinflusst. Der klare Gewinner ist die Länge des passiven (unteren) Arms: längere untere Arme vergrößern den Arbeitsraum deutlich. An zweiter Stelle folgt die Länge des aktiven (oberen) Arms, die ebenfalls den Bewegungsbereich erweitert, aber bei zu großer Länge Vibrationen verursachen kann. Der Basenradius hat eine moderate Wirkung; ist die Basis zu breit, kollidieren die beweglichen Arme leichter mit dem Gestell, wodurch das tatsächlich nutzbare Volumen schrumpft. Der Radius der bewegten Plattform wirkt am schwächsten, doch eine kleinere Plattform verschafft leichte Vorteile, weil sie mehr Platz für die Armbewegung eröffnet. Range‑ und Varianzanalysen zeigen, dass einige Parameterkombinationen zwar das größte Gesamtvolumen liefern, dieses aber nicht unbedingt den engen, torförmigen Bereich abdeckt, der für das Teesortieren relevant ist.
Ein Design, das zur Teelinie passt
Die praktischste Konfiguration ist nicht jene mit dem größten Gesamtvolumen, sondern die, deren Arbeitsraum die torförmige Trajektorie gut umschließt. Eine bestimmte Kombination — 250 mm obere Arme, 400 mm untere Arme, 90 mm Basenradius und 50 mm Radius der bewegten Plattform — deckt den erforderlichen Pfad zwischen den beiden Förderbändern vollständig ab und hält den Roboter gleichzeitig kompakt und stabil. In einer Arbeitshöhe von etwa 325 mm über der Bezugsfläche erreicht der Roboter seine breiteste nutzbare Spannweite, mehr als genug, um beide Bänder zu überbrücken und den Greif–Anheb–Verschiebe–Ablage‑Zyklus innerhalb der sicheren Zone auszuführen.
Was das für künftige Teefabriken bedeutet
Für Nicht‑Spezialisten lautet die Kernbotschaft: Kleine Änderungen in der Gliedlängen‑ und Plattformdimensionierung eines Roboters können darüber entscheiden, ob eine Maschine lediglich beeindruckend im Freiraum bewegt, oder ob sie zuverlässig auf einer echten Produktionslinie arbeitet. Indem die Studie quantifiziert, wie jeder strukturelle Parameter das erreichbare Volumen und dessen Überlappung mit einem realistischen torförmigen Pfad formt, liefert sie eine Anleitung zur Auslegung von Delta‑Robotern, die Teeblätter schnell, präzise und mit minimalen Schäden sortieren. Derselbe Ansatz kann maßgeschneiderte Roboter für andere Lebensmittel oder empfindliche Produkte leiten, überall dort, wo Geschwindigkeit, Präzision und schonende Handhabung gleichzeitig gefordert sind.
Zitation: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Schlüsselwörter: Delta‑Roboter, Teeblatt‑Sortierung, Roboter‑Arbeitsraum, Pick‑and‑Place, Industrielle Automatisierung