Clear Sky Science · de
Entwicklung und Bewertung eines oberflächengeführten Patientenlagersystems für die Bor-Neutronen-Einfangtherapie
Präziser Zielen für krebsbekämpfende Neutronen
Die Bor-Neutronen-Einfangtherapie (BNCT) ist eine vielversprechende Krebsbehandlung, die Tumorzellen selektiv schädigen kann und gleichzeitig einen Großteil des umgebenden gesunden Gewebes schont. Damit diese Präzision jedoch Früchte trägt, müssen Ärzte den Patienten exakt an der richtigen Stelle vor einem fixierten Neutronenstrahl platzieren—oft auf den Millimeter genau. Diese Arbeit beschreibt ein neues, kamera- und robotergestütztes Positionierungssystem, das darauf ausgelegt ist, diese heikle Einrichtung schneller, genauer und weniger abhängig von der ruhigen Hand und Beurteilung eines Technikers zu machen.
Warum die Positionierung so wichtig ist
Im Gegensatz zu vielen modernen Strahlentherapie-Geräten, die sich um den Patienten drehen und ihre Strahlenform verändern können, beruht BNCT auf einer schweren, festen Neutronenquelle mit begrenzten Möglichkeiten zur Strahlsteuerung. Der Patient — nicht der Strahl — muss in genau die richtige Position gebracht werden. Traditionell nutzen Mitarbeiter Laser, Hautmarkierungen und manuelle Verschiebungen der Liege, um dies zu erreichen. Dieser Prozess ist langsam, stark von der Erfahrung des Bedieners abhängig und kann kleine Positionsfehler hinterlassen, die beeinflussen, welche Dosis ein Tumor — und nahegelegene Organe — tatsächlich erhalten. Wenn BNCT-Zentren beginnen, komplizierte Tumoren im Kopf‑, Halsbereich und anderen schwer zugänglichen Regionen zu behandeln, werden diese Einschränkungen zu einem ernsten Hindernis.
Ein High-Tech-Helfer: Kameras, Software und ein Roboter
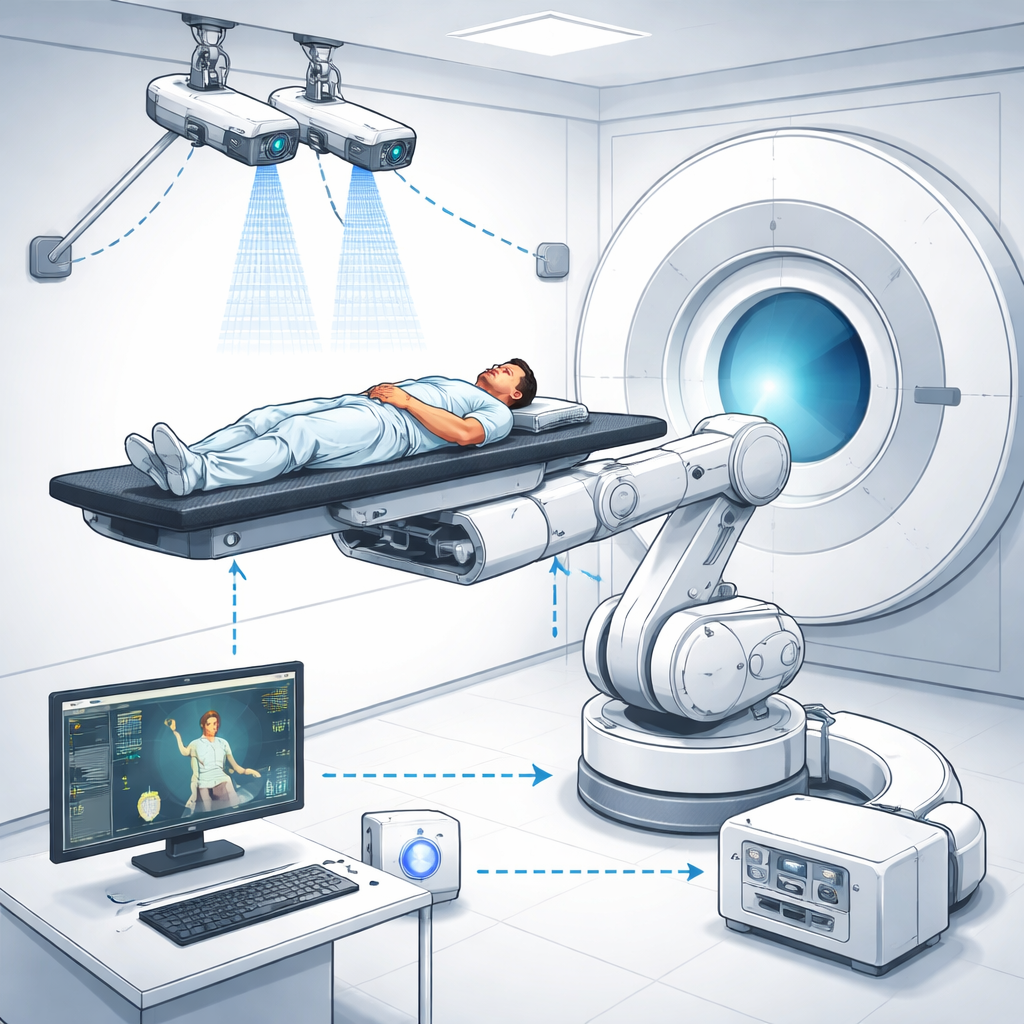
Um dieses Problem anzugehen, baute das Forschungsteam ein integriertes Surface-Guided BNCT (SG‑BNCT) System, das drei Hauptkomponenten kombiniert: ein spezialisiertes Behandlungsplanungsprogramm namens NeuMANTA, ein binokulares Stereo‑Kamerapaar und einen sechsachsigen Industrieroboter, der die Behandlungsliege trägt. In NeuMANTA planen Ärzte die BNCT-Behandlung anhand von CT-Bildern, einschließlich des exakten Punkts, durch den der Neutronenstrahl verlaufen soll, sowie drei kleiner Referenzpunkte oder Fiducial-Marker auf der Haut des Patienten. Diese Marker definieren die Patientenposition in den Planungsbildern und verbinden diesen Plan über mathematische Transformationsmatrizen mit den Koordinaten des realen Behandlungsraums.
Wie 3D-Kameras die Aufstellung sehen und korrigieren
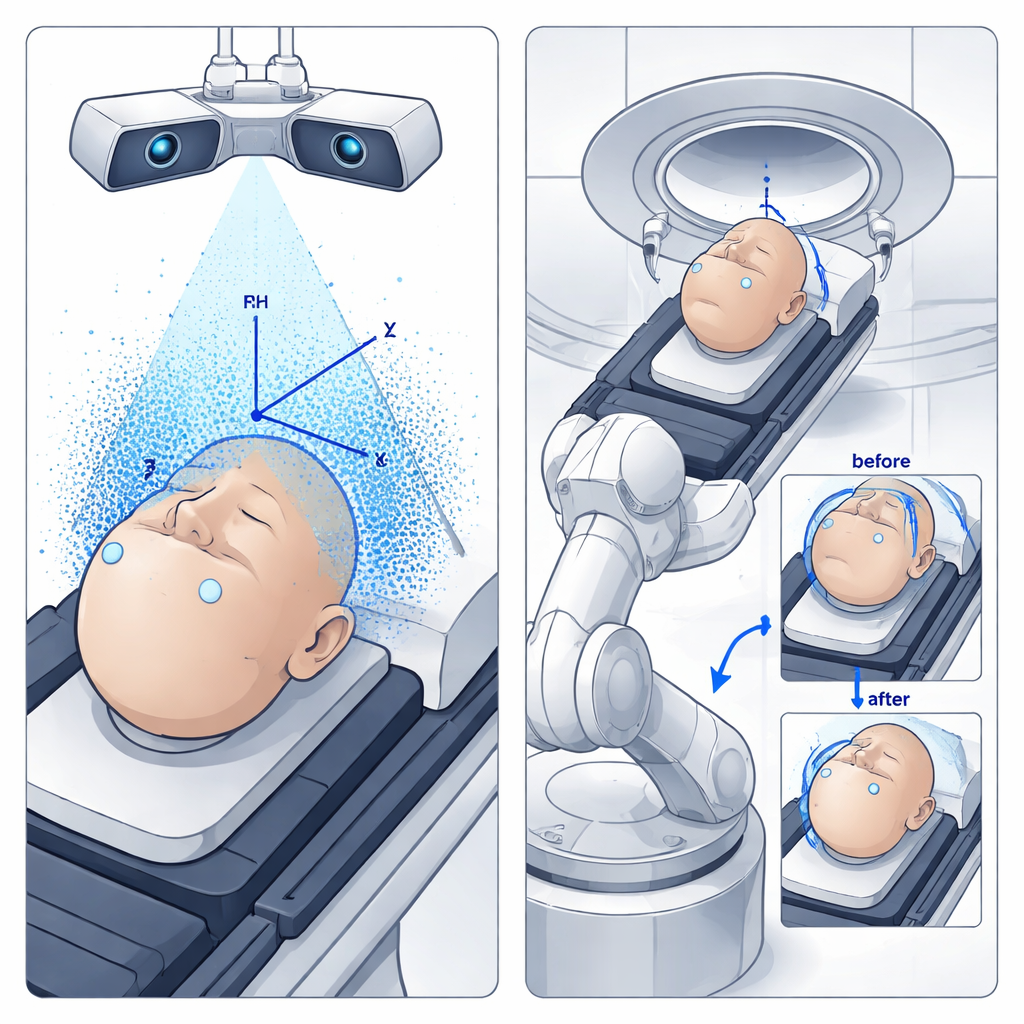
Im Behandlungsraum beobachten zwei hochauflösende Kameras den Patienten aus unterschiedlichen Blickwinkeln, ähnlich wie menschliche Augen. Mit einem modernen Objekterkennungsalgorithmus (YOLO), der mit über tausend Bildern trainiert wurde, findet das System schnell dieselben Fiducial-Marker auf der Patientenoberfläche. Durch den Vergleich, wie jeder Marker in der linken und rechten Kameraansicht erscheint, rekonstruiert der Rechner deren 3D‑Positionen und erzeugt eine detaillierte Punktwolke der Oberfläche. Aus drei nicht kollinearen Markern baut es ein Patientenkoordinatensystem auf und vergleicht dieses mit dem im Behandlungsplan definierten Koordinatensystem. Jede Abweichung zwischen der geplanten und der tatsächlichen Position wird in Translations- und Rotationsbefehle—insgesamt sechs Freiheitsgrade—für den Industrieroboter umgesetzt, der die Patientenliege trägt.
Tests mit einem Stellvertreter-Patienten
Bevor das System an echten Patienten eingesetzt wurde, testete das Team es mit einem anthropomorphen Phantom—einem menschengestaltigen Modell—ausgestattet mit internen und Oberflächenmarkern, die sowohl in CT-Scans als auch für die Kameras sichtbar sind. Sie erstellten mehrere Behandlungsaufbauten in NeuMANTA mit unterschiedlichen Strahlrichtungen und ließen das SG‑BNCT-System diese Pläne automatisch reproduzieren, indem es das Phantom in Position bewegte. Ein Laser, der in der Mitte der Neutronenstrahlöffnung platziert wurde, diente als Stellvertreter für den tatsächlichen Strahl, sodass die Forscher direkt messen konnten, wie weit der endgültige Punkt auf dem Phantom vom beabsichtigten Ziel abwich—sowohl entlang der Strahlrichtung (Quelle‑zu‑Haut‑Abstand) als auch seitlich in der zum Strahl senkrechten Ebene.
Wie nahe kam das System ans Ziel?
In 24 Versuchsanordnungen lagen die Positionsfehler des Systems typischerweise unter 1 Millimeter in beiden Richtungen, wobei die schlechtesten Einzelmessungen entlang der Strahlachse etwa 2 bis 3 Millimeter erreichten. Die Autoren führten diese verbleibenden Abweichungen auf drei Haupteinflussgrößen zurück: die Dicke der CT-Bildschichten, kleine Kalibrierunsicherheiten der Stereo‑Kameras und winzige pixelbasierte Ungenauigkeiten bei der Markererkennung durch die Software. Wichtig ist, dass das System als geschlossener Regelkreis ausgelegt ist: Es misst die Markerpositionen wiederholt nach, aktualisiert die 3D‑Ausrichtung und befiehlt zusätzliche Feinbewegungen des Roboters, bis der verbleibende Fehler unter eine voreingestellte Schwelle fällt. In diesen iterativen Tests sanken die endgültigen Abweichungen beständig auf deutlich unter 1 Millimeter, sodass in Tiefe und seitlicher Richtung submillimetergenaue Ausrichtung erreicht wurde.
Was das für Patienten bedeutet
Für Patienten, die von BNCT profitieren könnten—insbesondere bei Tumoren in komplexen oder sensiblen Regionen—verspricht dieses oberflächengeführte, robotergestützte Positionierungssystem zuverlässigere und effizientere Behandlungen. Indem die Behandlungsplanungssoftware direkt mit Kameras verbunden wird, die den tatsächlichen Patienten sehen, und mit einem Roboter, der genaue Bewegungen ausführen kann, reduziert die Methode die Abhängigkeit von manueller Laserjustage und menschlichem Ermessen. Zwar ist die aktuelle Version noch zu langsam für echtes Echtzeit‑Motion‑Tracking und es wurden bislang nur statische Tests durchgeführt, doch zeigen die Ergebnisse, dass die Technologie routinemäßig submillimetergenaue Positionierungen ermöglicht. Mit weiteren Geschwindigkeitsverbesserungen und strahlungsresistenter Hardware könnte dieser Ansatz in der Klinik zu einer praktischen Basis für sicherere, konsistentere BNCT‑Behandlungen werden.
Zitation: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Schlüsselwörter: Bor-Neutronen-Einfangtherapie, Patientenpositionierung, Stereo‑Vision, Medizintechnik/Robotertechnik, Oberflächenführung