Clear Sky Science · de
Anwendung eines temporalen Faltungsnetzwerk‑Algorithmus kombiniert mit einem Kanal‑Aufmerksamkeitsmodul für UWB‑Indoor‑Positionierung
Warum das Auffinden von Menschen in Innenräumen so schwierig ist
Smartphones, Serviceroboter und Lagerroboter müssen genau wissen, wo sie sich befinden, auch wenn GPS‑Satelliten sie in Gebäuden nicht erreichen. Ultra‑Wideband‑(UWB‑)Funk hat sich als eine führende Option etabliert, weil er Entfernungen mit zentimetergenauer Präzision messen kann. In realen, stark strukturierten Innenräumen mit Wänden, Glasflächen und bewegten Personen werden diese Funksignale jedoch oft reflektiert, gebrochen oder zeitweise blockiert, was zu plötzlichen Sprüngen in den gemeldeten Positionen führt. Dieser Artikel untersucht eine neue, KI‑basierte Methode, die die UWB‑Positionierung in solchen unruhigen Innenumgebungen deutlich genauer und stabiler macht.
Funkimpulse in einem überfüllten Raum
UWB‑Systeme lokalisieren ein Gerät, einen sogenannten Tag, indem sie messen, wie lange extrem kurze Funkimpulse benötigen, um zwischen dem Tag und mehreren festen Basisstationen zu reisen. In einfachen, offenen Räumen funktioniert dieser „Ankunftszeit“‑Ansatz gut. Innenräume sorgen jedoch dafür, dass Signale oft indirekte Wege nehmen — sie springen von Türen, Fenstern und Personen ab — bevor sie einen Empfänger erreichen. Diese Nicht‑Sichtverbindungspfade (NLOS) lassen den Tag weiter entfernt erscheinen, als er tatsächlich ist. Traditionelle Korrekturen beruhen auf sorgfältig gestalteten mathematischen Filtern oder auf Machine‑Learning‑Werkzeugen, die zuerst versuchen, jedes Signal als sauber oder verzerrt zu kennzeichnen. Diese Ansätze helfen zwar, sind aber entweder stark von Experten‑Feinabstimmung abhängig oder haben Mühe, wenn sich Personen unvorhersehbar durch den Raum bewegen.
Daten über die Zeit sprechen lassen
Die Forscher schlagen eine andere Strategie vor: Anstatt jede Entfernungsablesung isoliert zu behandeln, betrachten sie, wie sich die Messwerte im Zeitverlauf ändern, und lassen ein Deep‑Learning‑Modell die Muster erlernen. Ihr zentrales Werkzeug ist ein temporales Faltungsnetzwerk (TCN), eine Art neuronales Netzwerk, das für Zeitreihendaten entwickelt wurde. Im Gegensatz zu rekurrenten Netzen, die einen Zeitpunkt nach dem anderen verarbeiten, verwenden TCNs eindimensionale Faltungen, die parallel lange Zeitabschnitte der Historie untersuchen können. Dieses Design vermeidet typische Trainingsprobleme und erlaubt dem Modell, subtile, längerfristige Trends zu erkennen — etwa wie eine Person, die zwischen Tag und Basisstation geht, die gemessene Entfernung vorübergehend verlängert und sie danach wieder verkürzen lässt.
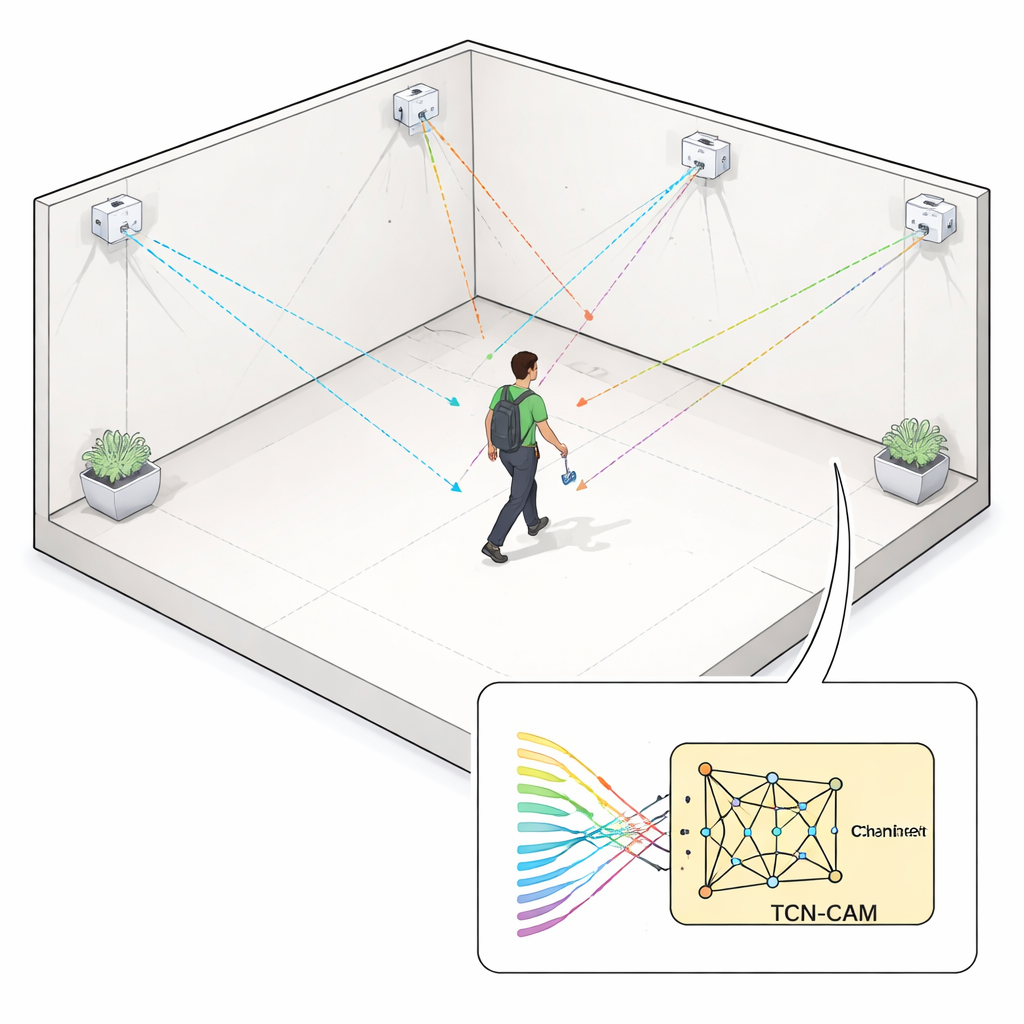
Dem Netzwerk beibringen, worauf es achten soll
Auf das TCN legt das Team ein Kanal‑Aufmerksamkeitsmodul (CAM). Jede Basisstation liefert ihren eigenen Strom an Distanzmessungen, und nicht alle davon sind zu jedem Zeitpunkt gleichermaßen vertrauenswürdig. CAM lernt, diesen Strömen unterschiedliche Gewichte zuzuweisen, indem es diejenigen hervorhebt, die konsistent aussehen, und diejenigen abschwächt, die durch Reflexionen oder Blockaden verfälscht scheinen. Zusammen nimmt das kombinierte TCN‑CAM‑Netzwerk rohe, verrauschte Entfernungen von sechs Basisstationen auf und liefert in einem einzigen End‑to‑End‑Schritt die beste Schätzung der dreidimensionalen Koordinaten des Tags — ganz ohne eine separate Signal‑Klassifikationsphase.
Test in simuliertem Rauschen und realen Fluren
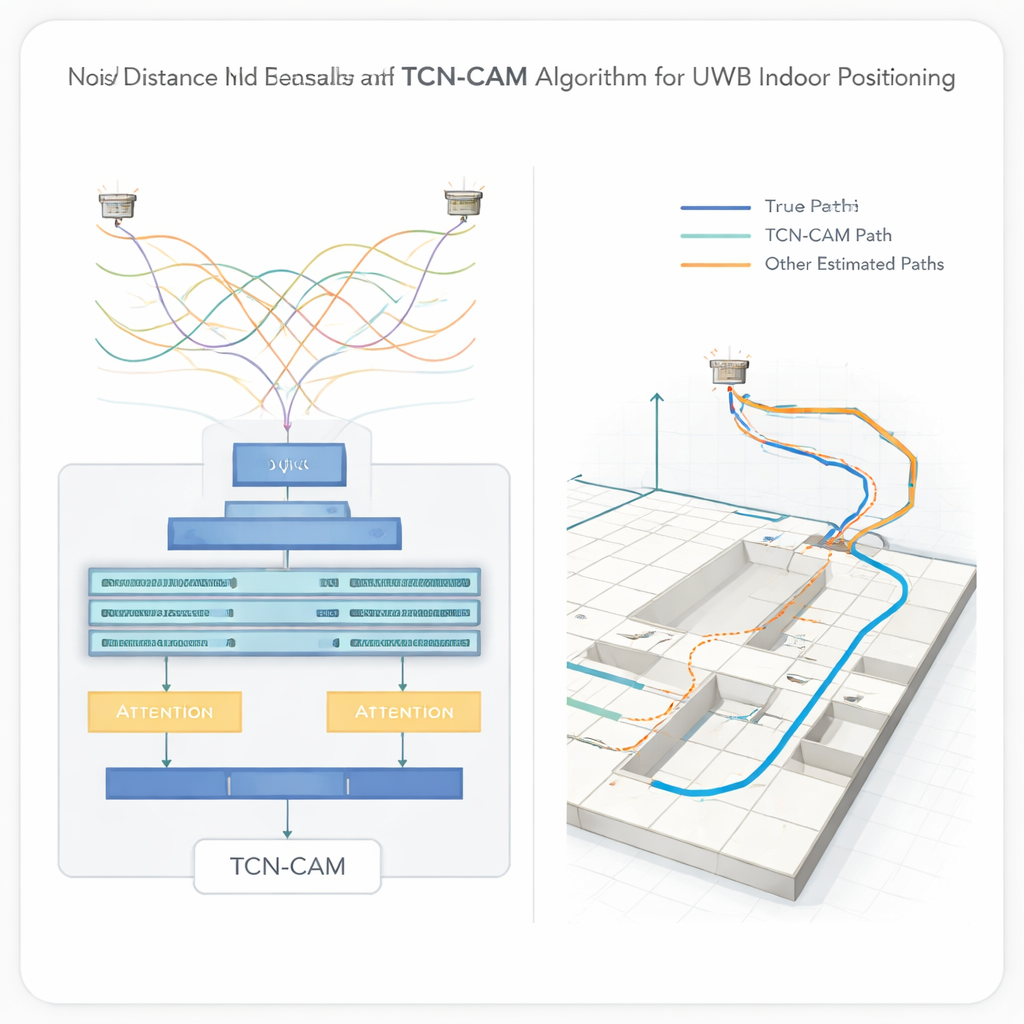
Um die Leistungsfähigkeit der Methode zu prüfen, erzeugten die Autoren zunächst Tausende virtueller Innenraumpositionen und simulierten UWB‑Messungen mit unterschiedlichen Stärken an hinzugefügtem Rauschen und NLOS‑Fehlern. Sie verglichen ihren TCN‑CAM‑Ansatz mit drei Konkurrenten: einem Long‑Short‑Term‑Memory‑Netz mit Attention, einem Standard‑TCN und einem Faltungsnetz mit Kanalaufmerksamkeit. Mit zunehmender Simulationsstörung stiegen die Fehler für alle Methoden, aber TCN‑CAM erzeugte durchgängig die geringsten Fehler und die engste Verteilung der Ergebnisse, was auf höhere Genauigkeit und größere Zuverlässigkeit hinweist. Unter den härtesten Testbedingungen verringerte es die durchschnittlichen Positionsfehler um etwa ein Viertel bis die Hälfte im Vergleich zu den anderen Methoden.
Vom Labor zur Bewegung in der Realität
Das Team ging anschließend zu einem realen Testgelände in Innenräumen über, das mit sechs UWB‑Basisstationen, einem hochpräzisen Vermessungsgerät und Personen ausgestattet war, die bewusst den Signalfeldgang blockierten. Der neue Algorithmus lokalisierte den sich bewegenden Tag mit einem durchschnittlichen Fehler von nur 3,32 Zentimetern. Das war etwa 19 % besser als ein reines TCN, 25 % besser als das Faltungs‑plus‑Aufmerksamkeit‑Modell und beeindruckende 76 % besser als der auf LSTM basierende Ansatz. Die TCN‑CAM‑Ergebnisse liegen nicht nur dichter um den wahren Pfad, sie folgen auch der tatsächlichen dreidimensionalen Trajektorie des Tags in jeder Richtung treuer.
Was das für Alltagstechnik bedeutet
Für Nicht‑Spezialisten ist die Quintessenz simpel: Indem ein intelligentes Modell beobachtet, wie sich UWB‑Distanzmessungen im Zeitverlauf ändern und lernt, welche Signale in jedem Moment vertrauenswürdig sind, kann die Indoor‑Positionierung deutlich präziser und weniger sprunghaft werden — selbst wenn sich Personen bewegen und den Funkweg blockieren. Zwar muss die Methode neu trainiert werden, wenn die festen Basisstationen versetzt werden, doch sie bietet eine leistungsfähige und praktikable Lösung für Fabriken, Krankenhäuser, Lagerhäuser und intelligente Gebäude mit fester Infrastruktur. Wenn ähnliche Deep‑Learning‑Techniken reifen und UWB mit anderen Sensoren fusioniert wird, könnten sich Innenraumgeräte bald fast so zuverlässig orten wie Ihr Telefon im Freien.
Zitation: He, L., Lian, Z., Núñez-Andrés, M.A. et al. Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning. Sci Rep 16, 6305 (2026). https://doi.org/10.1038/s41598-026-35802-0
Schlüsselwörter: Indoor‑Positionierung, Ultra‑Wideband, Tiefenlernen, Zeitreihenanalyse, Standortverfolgung