Clear Sky Science · de
Dynamischer globaler Tracker für Online-Mehrkamera-Mehrfahrzeug-Verfolgung
Warum intelligentere Verkehrskameras wichtig sind
Wer schon einmal im Stau stand oder sich Sorgen um Verkehrsunfälle gemacht hat, kennt die Grenzen heutiger Verkehrssysteme. Moderne Städte installieren inzwischen Netzwerke von Kameras entlang von Autobahnen und an Kreuzungen, um den Verkehr in Echtzeit zu beobachten. Doch diese Kameras so zusammenarbeiten zu lassen, dass dasselbe Fahrzeug nahtlos von einer Kamera zur nächsten verfolgt wird, ist überraschend schwierig. Diese Studie stellt eine neue Methode vor, um Fahrzeuge gleichzeitig über viele Kameras hinweg zu verfolgen, mit dem Versprechen schnellerer und zuverlässigerer Überwachung, die Straßen sicherer machen und das Verkehrsmanagement reaktionsfähiger gestalten könnte.
Das Problem der heutigen Verkehrserfassung
Traditionelle Systeme behandeln jede Kamera fast wie eine eigene kleine Welt. Zuerst erkennen sie Fahrzeuge in jedem Video und bauen dann kurze Trajektorien für jedes Auto innerhalb des Sichtfelds einer einzelnen Kamera auf. Erst nach Auswertung langer aufgezeichneter Videoabschnitte versuchen sie, diese Trajektorien mithilfe aufwändiger Datenclusterung und handgefertigter Regeln zur Straßenführung und Kameraposition zusammenzufügen. Dieser Offline-Ansatz ist langsam, benötigt viel Rechenleistung und hat Schwierigkeiten, wenn sich Verkehrssituationen ändern, Kameras versetzt werden oder neue Blickwinkel hinzukommen. Er kämpft außerdem, wenn Kameras dasselbe Fahrzeug in sehr unterschiedlichen Größen und Winkeln zeigen, sodass dasselbe Auto wie zwei völlig verschiedene aussehen kann.
Ein neuer Ansatz: Alles in Echtzeit verfolgen
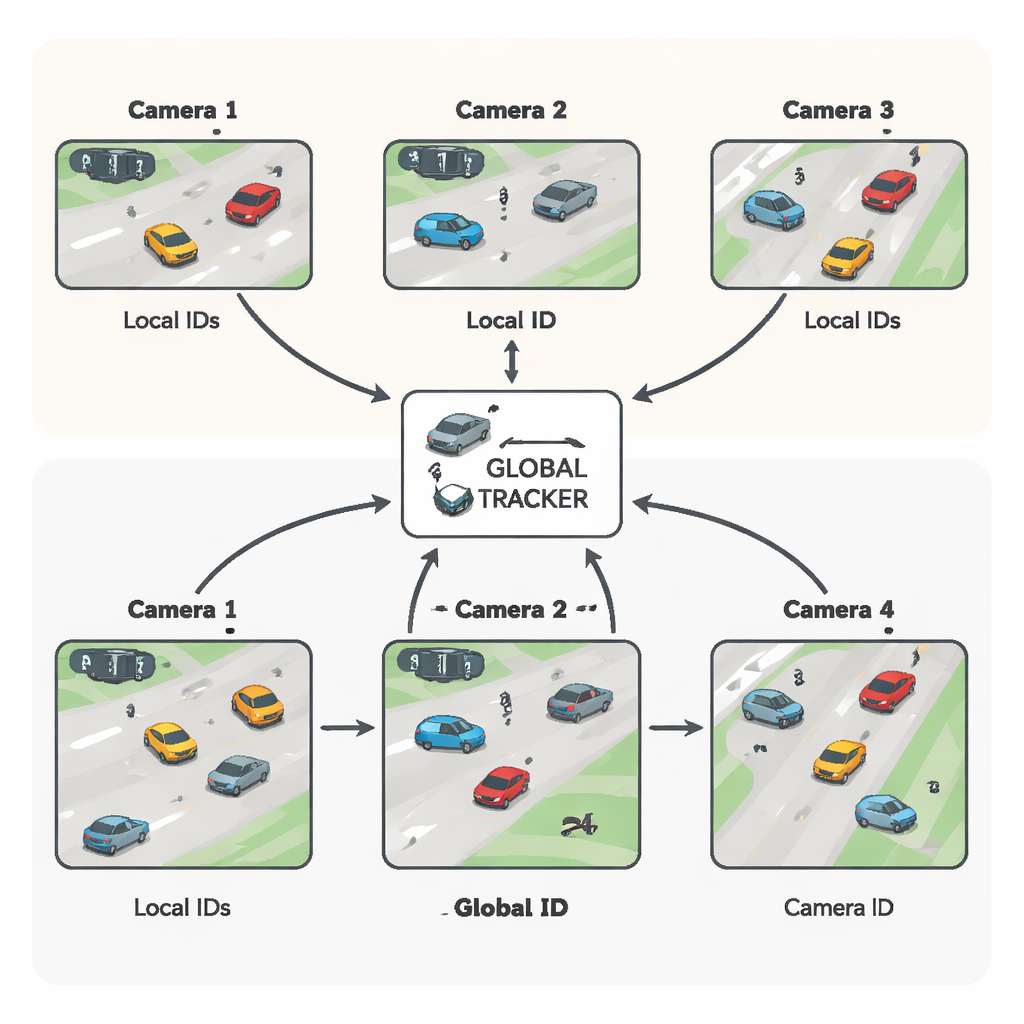
Die Forschenden schlagen ein neues Rahmenkonzept namens Dynamic Global Tracking (DGT) vor, das von Grund auf für Echtzeitanwendungen entwickelt wurde. Anstatt zu warten, bis alle Videos gesammelt sind und danach Fahrzeugpfade zu verknüpfen, baut DGT diese Verknüpfungen direkt während der Aufzeichnung auf. Jede Kamera erkennt weiterhin Fahrzeuge und erstellt kurze intra-kamerale Tracks, doch sobald diese Tracks aktualisiert werden, werden sie sofort mit Tracks anderer Kameras verglichen. Ein bewährter Zuordnungsalgorithmus entscheidet, ob zwei Tracks aus verschiedenen Ansichten zum selben Fahrzeug gehören. Dieser Online-Schritt-für-Schritt-Prozess ersetzt die umfassende Clusterbildung über alle vergangenen Daten, reduziert die Rechenlast und macht es möglich, mit dem Live-Verkehr mitzuhalten.
Dasselbe Auto aus verschiedenen Blickwinkeln erkennen
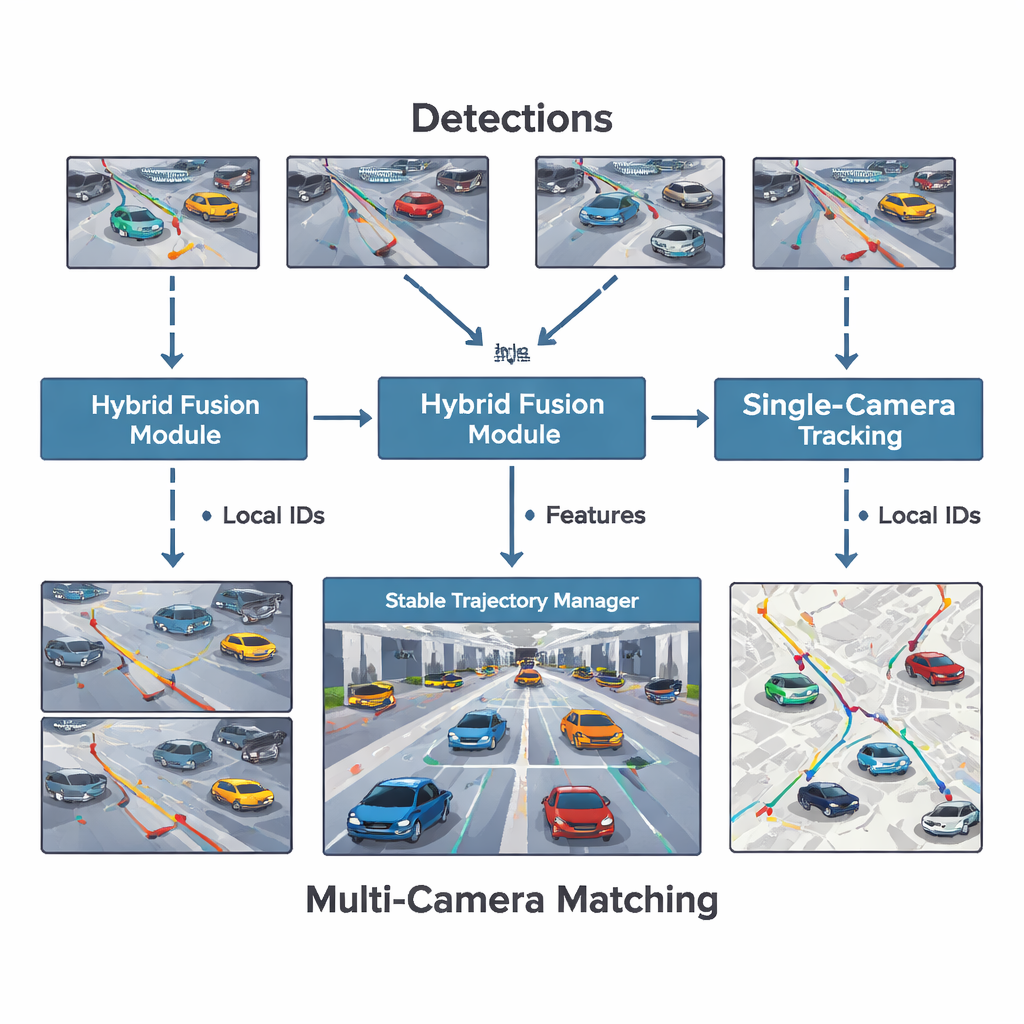
Eine große Herausforderung ist, dass dasselbe Fahrzeug in einer Kamera groß und detailreich und in einer anderen klein und unscharf erscheinen kann oder in einem Tunnel anders beleuchtet ist als auf einer offenen Straße. Um damit umzugehen, enthält DGT ein Hybrid-Fusionsmodul, das feine Details und weiter gefassten Kontext aus jedem Bild zusammenführt. Es verarbeitet die Kamerabilder gleichzeitig auf zwei Wegen: Ein Zweig konzentriert sich auf scharfe, kleinskaliige Details wie Kanten und Texturen, während der andere Zweig eher globale Muster und Kontext betrachtet. Das System kombiniert beide Ansichten zu einer einzigen, stabilen Beschreibung des Erscheinungsbilds des Fahrzeugs. Tests zeigen, dass dieser Ansatz die Zuverlässigkeit der Identifikation hochhält, selbst wenn Größe oder Schärfe des Fahrzeugs zwischen Kameras drastisch variieren.
Tracks stabil und vertrauenswürdig halten
DGT führt zudem einen Stable Trajectory Manager ein, der wie eine Qualitätskontrollstelle für Tracking-Entscheidungen agiert. Er filtert unsichere Detektionen heraus, verwaltet, wie lange ein Fahrzeug hinter einem anderen Fahrzeug oder Hindernis verschwinden kann, bevor es als „verschwunden“ gilt, und entfernt Objekte, die sich über die Zeit nicht bewegen, etwa parkende Fahrzeuge oder Leitplanken. Sorgfältig gewählte Zeit- und Bewegungsgrenzwerte ermöglichen es dem System, zwischen einem kurzzeitig im Tunnel verborgenen Fahrzeug und einem, das die Szene wirklich verlassen oder in eine andere Kamera gewechselt hat, zu unterscheiden. Zusammen helfen diese Regeln, konsistente IDs für jedes Fahrzeug beizubehalten und plötzliche Sprünge, Verluste oder fehlerhafte Zusammenführungen von Tracks zu reduzieren.
Was das für den Alltag auf den Straßen bedeutet
In umfangreichen Tests sowohl in einem chinesischen Straßentunnel als auch an einer verkehrsreichen Kreuzung in einer amerikanischen Stadt erzielte DGT hohe Genauigkeit und lief gleichzeitig schnell genug für den Echtzeiteinsatz. Anders als viele frühere Systeme, die auf eine einzige Szenerie abgestimmt waren, bewältigte DGT sowohl überlappende als auch nicht überlappende Kamerasichten, ohne detaillierte manuelle Angaben zur Straßenführung zu benötigen. Für Autofahrende und Stadtbewohner bedeutet diese robuste, flexible Verfolgung, dass Verkehrszentralen schneller auf Unfälle, Staus oder ungewöhnliches Verhalten reagieren könnten – mit einem klareren, kontinuierlicheren Bild davon, wie Fahrzeuge sich durch das Netzwerk von Straßen und Kameras bewegen.
Zitation: Chen, X., Chan, S., Bin, G. et al. Dynamic global tracker for online multi camera multi vehicle tracking. Sci Rep 16, 6101 (2026). https://doi.org/10.1038/s41598-026-35768-z
Schlüsselwörter: Mehrkamerafahrzeugverfolgung, intelligente Verkehrssysteme, Echtzeit-Verkehrsüberwachung, Computer Vision, Smart Cities