Clear Sky Science · de
YOLO11-WLBS: ein effizientes Modell zur Erkennung von Fahrbahnschäden
Warum bessere Straßenkontrollen wichtig sind
Jeder Riss und jede Schlagloch auf der Fahrbahn ist mehr als nur ein optischer Mangel — er verkürzt die Lebensdauer des Belags, kann Fahrzeuge beschädigen und zu Unfällen beitragen. Noch immer werden viele Straßen von Menschen inspiziert, die langsam mit Klemmbrettern oder einfachen Kameras entlangfahren. Das ist zeitaufwendig, teuer und fehleranfällig. Diese Studie stellt YOLO11‑WLBS vor, ein intelligenteres, leichteres Computer‑Vision‑System, das verschiedene Arten von Straßenschäden in Echtzeit erkennen kann, sogar auf einem Smartphone oder einer Drohne, und so schnellere und sicherere Instandhaltung unserer Straßeninfrastruktur verspricht.
Von langsamen Streifen zu intelligenten Kameras
Mit zunehmendem Verkehr und wachsenden Straßennetzen werden Schäden wie Querrisse und Längsrisse, Netzrisse (alligator cracking), schräge Risse, Schlaglöcher und Reparaturstellen häufiger. Traditionelle Inspektionen — zu Fuß oder im Fahrzeug oder mit einfacher Bildverarbeitung — sind stark von menschlichem Urteil abhängig und haben in schlechter Beleuchtung oder unübersichtlichen Szenen Schwierigkeiten. In den letzten zehn Jahren haben Deep Learning und insbesondere die YOLO‑Familie von Objekterkennungsnetzen die Bildanalyse revolutioniert, indem sie Muster direkt aus Rohbildern lernen. Frühere, auf YOLO basierende Fahrbahnsysteme verbesserten die Genauigkeit, standen jedoch vor einem grundlegenden Zielkonflikt: Modelle, die genau genug waren, waren oft zu groß und zu langsam für den Echtzeiteinsatz auf Drohnen, Fahrzeugen oder Handgeräten.
Ein abgestimmter Motor auf Basis von YOLO11
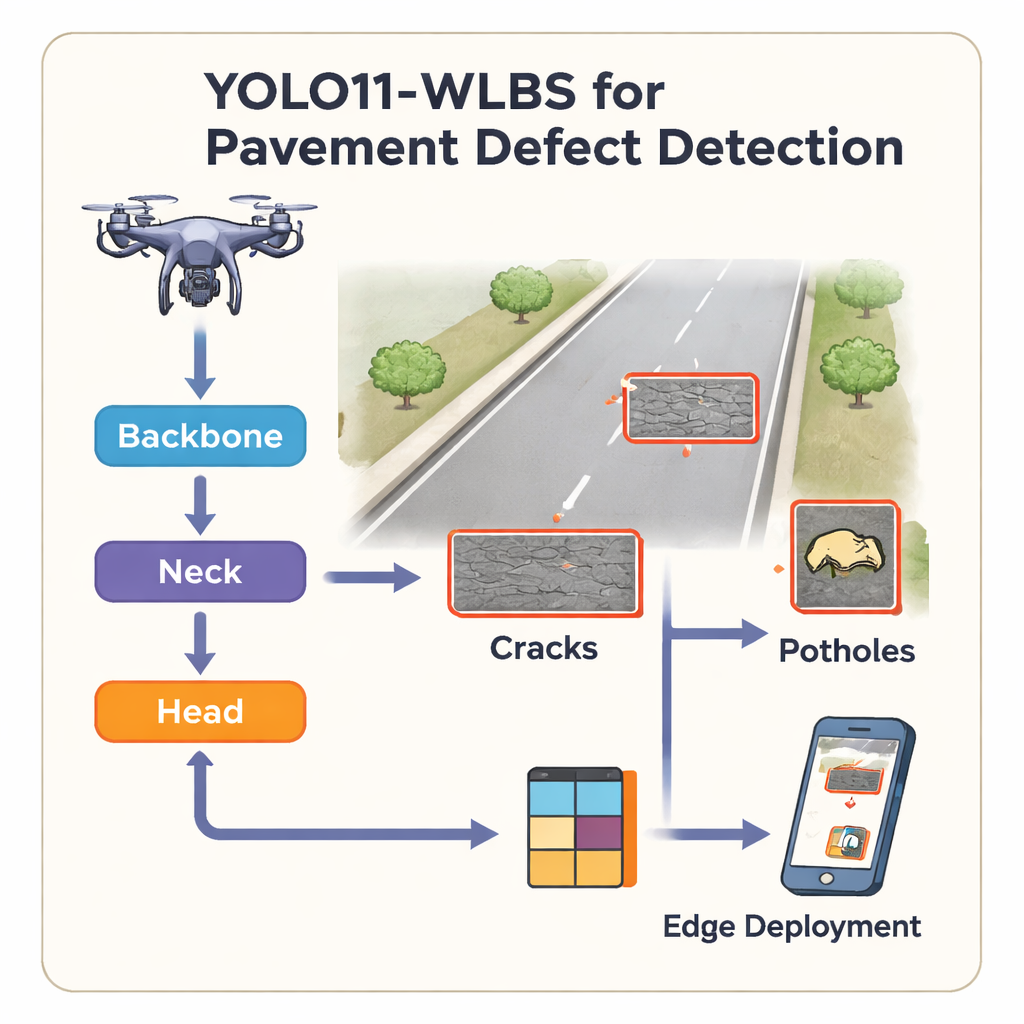
Die Autoren setzen bei YOLO11 an, einem modernen Objekterkennungsnetz, das bereits ein Gleichgewicht zwischen Geschwindigkeit und Genauigkeit bietet, und passen es an die speziellen Herausforderungen von Fahrbahnoberflächen an. Ihr verbessertes Modell, YOLO11‑WLBS genannt, bewahrt das übliche dreistufige Design — „Backbone“ zur Merkmalextraktion, „Neck“ zum Kombinieren von Informationen auf verschiedenen Skalen und „Head“ zum Ziehen von Begrenzungsrahmen und Labels um Schäden — und ergänzt es um vier gezielt ausgewählte Verbesserungen. Zusammen schärfen diese Ergänzungen das Auge des Modells für feine Risse, verbessern den Umgang mit verschiedenen Schadensgrößen und reduzieren unnötige Rechenaufwände, sodass es effizient auf Edge‑Geräten laufen kann.
Vier clevere Kniffe zum Erkennen von Rissen
Die erste Verbesserung nutzt wavelet‑basierte Faltung, um hochfrequente Details hervorzuheben — die scharfen Helligkeitsänderungen, die Risse und kleine Löcher umreißen — ohne das Modell aufzublähen. Das hilft dem System, schwache, dünne oder unregelmäßige Schäden zu entdecken, die Standardfilter übersehen könnten. Als Nächstes reorganisiert ein „leichtgewichtiger adaptiver Extraktionsschritt“ die Feature‑Maps, sodass das Netzwerk seine Kapazität auf die informativsten Kanäle konzentriert und gleichzeitig die Gesamtzahl der Parameter um etwa ein Viertel reduziert. Eine bidirektionale Feature‑Pyramide erlaubt dann den Informationsfluss zwischen groben und feinen Skalen nach oben und unten, was sowohl die Erkennung winziger Risse als auch größerer, verbundener Rissmuster verbessert. Schließlich hebt ein einfaches Aufmerksamkeitsmechanismus die wichtigsten Regionen in jeder Feature‑Map hervor und lenkt den Detektor zu echten Schäden und weg von Ablenkungen wie Fahrbahnmarkierungen, Schatten oder Flecken.
Der Beweis in der Praxis
Um YOLO11‑WLBS zu testen, trainierte und evaluierte das Team es an hochauflösenden Drohnenbildern echter Fahrbahnen mit über zehntausend gelabelten Schäden in sechs Kategorien. Im Vergleich zum ursprünglichen YOLO11 steigert das neue Modell die Präzision von 0,853 auf 0,947 und die Trefferquote (Recall) von 0,698 auf 0,895 — es produziert also weniger Fehlalarme und übersieht deutlich weniger Schäden. Der Gesamt‑Erkennungswert (mAP@0.5) steigt um 12,2 %, während die Anzahl der Parameter um etwa 25,5 % sinkt. Das System bleibt auch bei niedriger und hoher Beleuchtung sowie bei unscharfen oder herunterskalierten Bildern präzise und überträgt sich gut auf ein unabhängiges Drohnendatenset mit anderen Blickwinkeln und geringerer Auflösung. Die Autoren setzen sogar eine vollständig quantisierte Version auf einem Android‑Smartphone ein und erreichen nahezu 30 Bilder pro Sekunde für Live‑Videoerkennung mehrerer Rissarten.
Was das für Fahrer und Städte bedeutet
Vereinfacht gesagt ist YOLO11‑WLBS ein schnelleres, schärferes Auge für unsere Straßen. Durch die Kombination besserer Kantenerkennung, intelligenter Nutzung der Modellkapazität, Multi‑Skalen‑Feature‑Fusion und leichtgewichtiger Aufmerksamkeit findet es mehr Schäden und läuft gleichzeitig auf bescheidener Hardware wie Drohnen und Smartphones. Das macht es praktikabel, lange Strecken häufiger zu scannen, Probleme früh zu erkennen und Reparaturen effizienter zu planen, ganz ohne große Teams in den Verkehr zu schicken. Obwohl das Modell bei seltenen Schäden wie Schlaglöchern noch etwas Schwierigkeiten hat — hauptsächlich, weil es weniger Beispiele zum Lernen gibt — bietet es eine solide Grundlage für künftige Systeme, die nicht nur den Ort des Schadens erkennen, sondern auch dessen Schwere abschätzen und Städte zu sichererem und kosteneffizienterem Unterhalt führen.
Zitation: Lin, J., Wang, P., Ruan, Y. et al. YOLO11-WLBS: an efficient model for pavement defect detection. Sci Rep 16, 5284 (2026). https://doi.org/10.1038/s41598-026-35743-8
Schlüsselwörter: Erkennung von Fahrbahnschäden, Rissdetektion auf Straßen, YOLO11-WLBS, Drohneninspektion, Edge-AI