Clear Sky Science · de
Fuzzy‑Gleitmodusregelung basierend auf dem Super‑Twisting‑Algorithmus für Deskriptor T‑S Fuzzy‑Systeme
Komplexe Systeme handhabbar machen
Von der Steuerung von Fischpopulationen bis zur Stabilisierung von Stromnetzen und elektronischen Schaltungen verhalten sich viele reale Systeme kompliziert und nichtlinear. Ingenieure nutzen fortgeschrittene Regelungsalgorithmen, um solche Systeme sicher und effizient zu betreiben, auch wenn sie Störungen und Unsicherheiten ausgesetzt sind. Dieses Papier stellt eine neue Regelungsstrategie vor, die diese schwer beherrschbaren Systeme sanfter in den Griff bekommt und dabei harte, schnelle Schaltvorgänge vermeidet, die Geräte beschädigen und die Leistung verschlechtern können.
Warum einige Systeme schwer zu regeln sind
Viele praktische Systeme werden nicht nur durch Differentialgleichungen beschrieben, die zeitliche Veränderungen abbilden, sondern unterliegen auch algebraischen Zwangsbedingungen, die jederzeit erfüllt sein müssen. Solche sogenannten Deskriptor‑Systeme treten in Wirtschaft, Energienetzen, mechanischen Koppelsystemen und biologischen Modellen auf. Um ihr nichtlineares Verhalten zu behandeln, greifen Forscher oft auf Takagi–Sugeno (T‑S) Fuzzy‑Modelle zurück, die ein komplexes System als Mischung einfacher linearer Teilmodelle darstellen, die in unterschiedlichen Betriebsbereichen gelten. Obwohl leistungsfähig, leidet dieses Rahmenwerk seit Langem unter einem technischen Hindernis: Die meisten Regelungsverfahren setzten voraus, dass die zeitliche Veränderung der Fuzzy‑Zugehörigkeitsfunktionen vorher bekannt ist, obwohl diese Veränderungen tatsächlich vom unbekannten künftigen Verhalten des Systems und seines Reglers abhängen.
Eine sanftere Form robuster Regelung
Die Gleitmodusregelung ist eine verbreitete robuste Regelungsmethode, die dafür bekannt ist, ein System schnell auf eine gewünschte Bahn zu zwingen und dort trotz Störungen zu halten. Dies geschieht durch Schalten der Stellgröße, um Unsicherheiten entgegenzuwirken. Das schnelle Schalten kann jedoch „Chattering“ verursachen — hochfrequente Oszillationen, die in mechanischen und elektrischen Systemen unerwünscht oder sogar schädlich sind. Der Super‑Twisting‑Algorithmus, eine weiterentwickelte Form der Gleitmodusregelung, verbirgt das Schalten in einem internen Prozess und erzeugt ein stetiges Stellgrößensignal, das die Robustheit bewahrt und gleichzeitig das Chattering reduziert. Bislang war diese Technik hauptsächlich auf einkanalige Systeme beschränkt oder erforderte die Zerlegung mehrerer Eingänge in viele einzelne Regler, was mit hohem Rechenaufwand verbunden ist.
Eine neue Gleitfläche ohne versteckte Annahmen
Der erste zentrale Beitrag der Autoren ist eine neue Art von „integraler“ Gleitfläche, die speziell für Deskriptor‑T‑S‑Fuzzy‑Systeme entwickelt wurde. Einfach gesagt handelt es sich bei dieser Fläche um eine mathematische Bedingung, die sowohl das gegenwärtige als auch aufsummierte vergangene Verhalten des Systems einbezieht. Durch geschickte Konstruktion zeigen die Autoren, dass sich die gewünschte Bewegung garantiert einstellt, sobald das System auf dieser Fläche liegt, ohne dass vorherige Schranken für die Änderung der Fuzzy‑Zugehörigkeitsfunktionen erforderlich sind. Damit entfällt eine einschränkende Annahme, die frühere Methoden limitiert hat. Die Analyse verwendet sorgfältig gewählte energieähnliche Funktionen, um zu beweisen, dass das Verhalten des Systems auf der Gleitfläche im Zeitverlauf stabil bleibt.
Ein mehrdimensionaler Super‑Twisting‑Regler
Aufbauend auf dieser Gleitfläche entwickelt das Papier eine mehrdimensionale Variante des Super‑Twisting‑Algorithmus. Anstatt für jeden Eingang oder jede Gleitvariable einen einzelnen Regler zu entwerfen, behandelt die Methode alle gemeinsam in Matrixform. Das macht sie besser geeignet für Systeme, in denen Zustände stark gekoppelt sind, etwa interagierende Arten in einem Ökosystem oder Ströme und Spannungen in einer Schaltung. Die Autoren leiten Bedingungen für die Wahl der Reglerverstärkungen her, sodass die Systemzustände die Gleitfläche sofort erreichen und anschließend in endlicher Zeit konvergieren. Da das Stellgrößensignal kontinuierlich statt schlagartig ist, wird Chattering von vornherein unterdrückt, während die Robustheit gegenüber Störungen erhalten bleibt.
Den Ansatz in Biologie und Elektronik beweisen
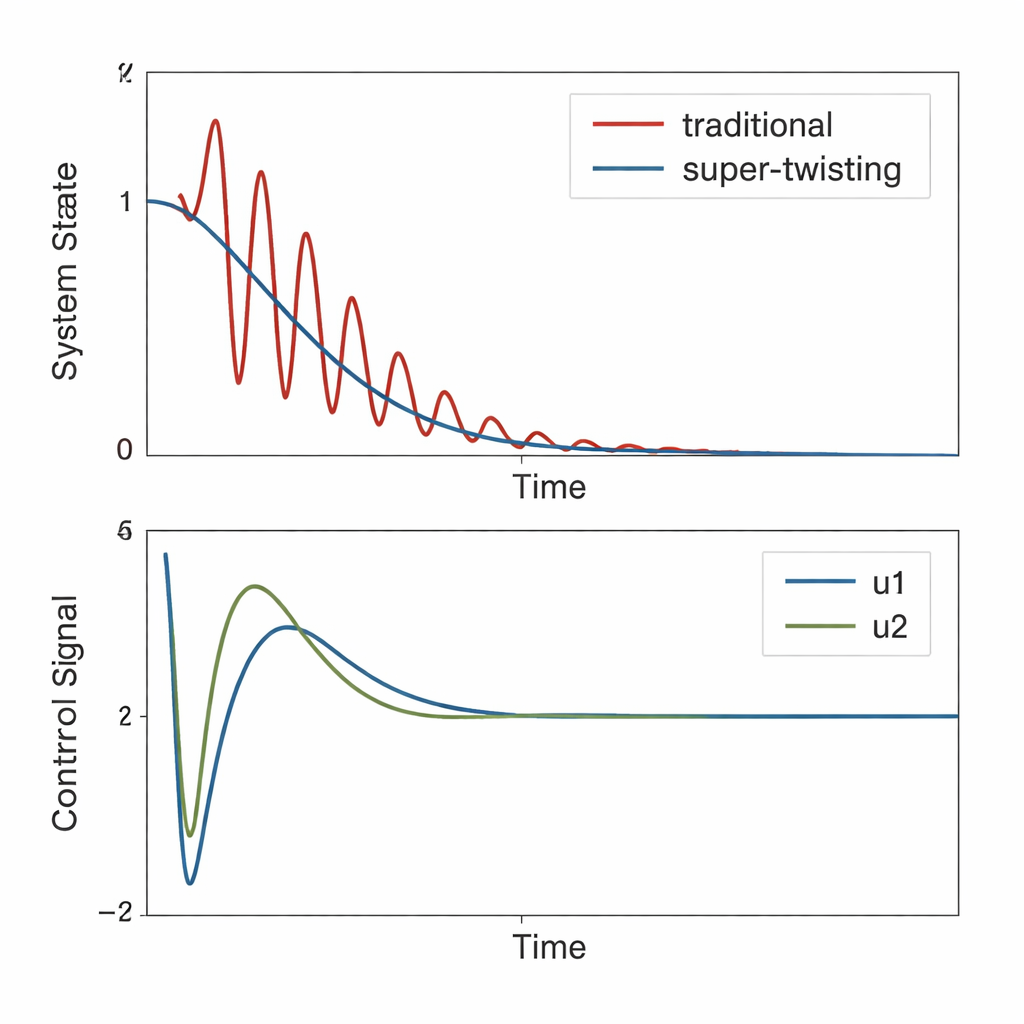
Um die Praktikabilität ihrer Methode zu demonstrieren, wenden die Autoren sie auf zwei verschiedene nichtlineare Deskriptor‑Systeme an. Das erste Modell beschreibt ein bioökonomisches Szenario mit unreifen und reifen Populationen einer Art sowie einer Variablen, die Fortpflanzungskapazität und Managementmaßnahmen wie Ernte und Regulierung erfasst. Das zweite Beispiel ist eine nichtlineare Tunnel‑Dioden‑Schaltung, ein klassischer Prüfstand in der Elektronik. In beiden Fällen zeigen Simulationen, dass der vorgeschlagene Regler die Systemzustände schnell stabilisiert und die Gleitvariablen nahe null hält, was auf eine präzise Verfolgung des gewünschten Verhaltens hinweist. Im Vergleich zu herkömmlichen Gleitmodusreglern reduziert der neue Ansatz die Schwingungen sowohl in der Systemantwort als auch in den Stellgrößensignalen deutlich.
Was das in der Praxis bedeutet
Für Nicht‑Experten ist die Kernbotschaft, dass diese Arbeit einen Weg bietet, komplexe, beschränkte und unsichere Systeme zu regeln, ohne die heftigen Schaltvorgänge zu erzwingen, die einige robuste Methoden problematisch machen. Durch die Kombination von Fuzzy‑Modellierung, einer integralen Gleitfläche und einem mehrdimensionalen Super‑Twisting‑Algorithmus entwerfen die Autoren Regler, die sowohl mathematisch stabilitätsgesichert als auch im Betrieb praktisch sanfter sind. Davon könnten Anwendungen von der ökologischen Ressourcenverwaltung bis zu fortschrittlicher Leistungselektronik und vernetzten Regelsystemen profitieren — insbesondere, wenn zukünftige Arbeiten diese Ideen auf cyber‑sichere Umgebungen ausweiten, in denen die Kommunikation durch Angriffe gestört werden kann.
Zitation: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Schlüsselwörter: Gleitmodusregelung, Fuzzy‑Systeme, robuste Regelung, nichtlineare Dynamik, Super‑Twisting‑Algorithmus