Clear Sky Science · de
Robuster modellreferenzadaptiver Regler für einen ebenen Manipulator mit 3 Freiheitsgraden
Intelligentere Roboterarme für härtere Aufgaben
Industrieroboterarme sind extrem schnell und präzise, doch ihre Leistung kann nachlassen, sobald die reale Umgebung abweicht — Lasten ändern sich, Bauteile werden leicht anders positioniert oder unvorhergesehene Kräfte stoßen den Arm an. Dieses Papier untersucht einen neuen Ansatz, um einen typischen dreigelenkigen Roboterarm auch dann genau und stabil zu halten, wenn sein Verhalten nur schwer exakt zu modellieren ist und starke Störungen auftreten, wodurch Roboter zu zuverlässigeren Partnern in der Fabrikhalle werden.
Warum drei Gelenke in echten Fabriken wichtig sind
Die Studie konzentriert sich auf einen dreigliedrigen ebenen Roboter: drei starre Segmente, die durch Drehgelenke verbunden sind und in einer Ebene bewegen. Trotz seiner Einfachheit ist diese Anordnung das Rückgrat vieler industrieller Pick-and-Place-Aufgaben, Verpackungslinien und Montagestationen. Die Herausforderung besteht darin, dass die Bewegung eines Gelenks die anderen stark beeinflusst und die zugrunde liegenden Gleichungen, die die Armbewegung beschreiben, hochgradig nichtlinear und eng gekoppelt sind. Traditionelle Regler funktionieren gut, wenn alles bekannt und vorhersehbar ist, doch sie haben Schwierigkeiten, wenn Nutzlasten wechseln, Reibung oder Massen nicht genau modelliert sind oder externe Störungen den Arm aus der Bahn werfen.
Komplexe Bewegung in einfachere Teile zerlegen
Um diese Komplexität zu bändigen, leiten die Autoren zunächst ein detailliertes mathematisches Modell der Armbewegung her, einschließlich der Kombination von Gliedmassen, Gelenkwinkeln und Gravitation. Anschließend führen sie eine wichtige Vereinfachung ein: eine „Entkopplungs“-Strategie. Anstatt den Roboter als ein verwobenes Dreigelenksystem zu behandeln, wird jedes Gelenk so modelliert, als hinge seine Beschleunigung hauptsächlich vom eigenen Motordrehmoment und der eigenen Geschwindigkeit ab. Die verbleibenden Effekte — wie Wechselwirkungen zwischen Gelenken, Gravitationstermen und andere schwer zu modellierende Einflüsse — werden zusammengefasst und als Unsicherheiten behandelt. Diese Entkopplung erlaubt es, das Regelungsproblem in drei kleinere, besser handhabbare Teilsysteme zu zerlegen, je eines pro Gelenk, während gleichzeitig anerkannt wird, dass das reale System darunter komplex bleibt. 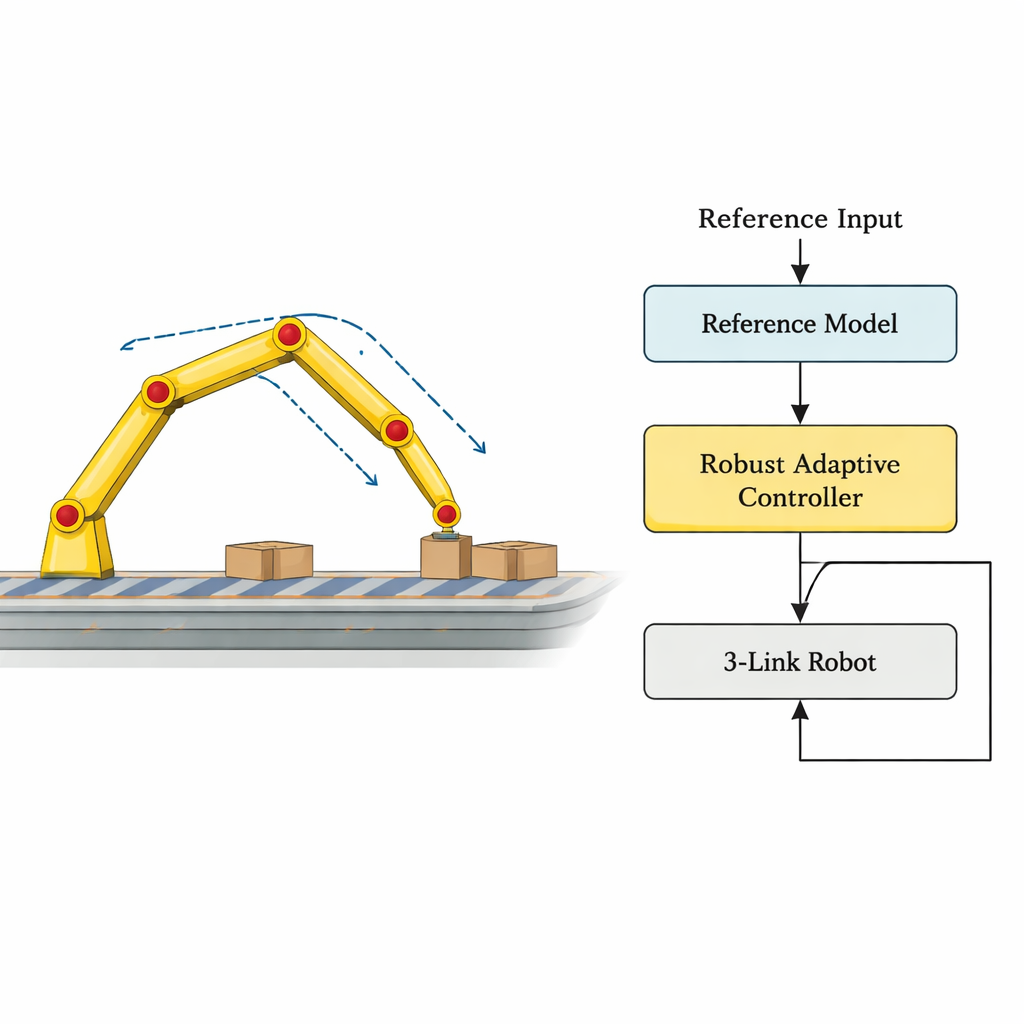
Den Roboter lehren, einem bewegten Ziel zu folgen
Auf diesem vereinfachten Modell bauen die Autoren einen modellreferenzadaptiven Regler (MRAC) auf. Einfach gesagt definieren sie zunächst ein ideales Verhalten — ein Referenzmodell, das beschreibt, wie sich jedes Gelenk im Zeitverlauf bei einem Befehl verhalten sollte. Der Regler vergleicht fortlaufend die tatsächliche Bewegung des Roboters mit diesem Ideal und passt seine internen Verstärkungen in Echtzeit an, um die Abweichung zu verringern. Unter perfekten Bedingungen kann konventioneller MRAC den Roboter nahe an das Referenzverhalten heranführen, aber er hat eine ernsthafte Schwäche: Bei anhaltenden Störungen oder Modellierungsfehlern können die adaptiven Verstärkungen zu extremen Werten driften, was zu Schwingungen, verschwendeter Energie und sogar Instabilität führt. Dieses Phänomen, genannt Parameterdrift, macht einfachen MRAC für den praktischen industriellen Einsatz riskant.
Anpassung robust statt rücksichtslos machen
Um diesen Drift zu vermeiden, entwickelt das Papier mehrere „robuste“ Varianten des MRAC, die unbekannte Effekte explizit berücksichtigen. Die Autoren fügen den Anpassungsgesetzen zusätzliche Terme hinzu, die die Reglerverstärkungen sanft zu sicheren Grenzen zurückziehen oder den Anpassungsaufwand in Abhängigkeit von der Größe des Verfolgungsfehlers skalieren. Unter den getesteten Strategien — bekannt als Sigma-Modifikation, Fehler-Modifikation und eine energiebewusste optimalregelungsbasierte Modifikation — sticht letztere hervor. Durch umfangreiche Computersimulationen, einschließlich schneller oszillierender Bahnen, Pick-and-Place-Bewegungen, Massenänderungen um 50 Prozent, plötzlicher Nutzlastankopplungen und starker hochfrequenter Störungen, hält der robuste MRAC den Verfolgungsfehler gering und die Steuersignale glatt. In Szenarien, in denen die internen Verstärkungen des konventionellen MRAC unbegrenzt wachsen, bleiben die robusten Varianten wohlgeordnet und die Armbewegung stabil. 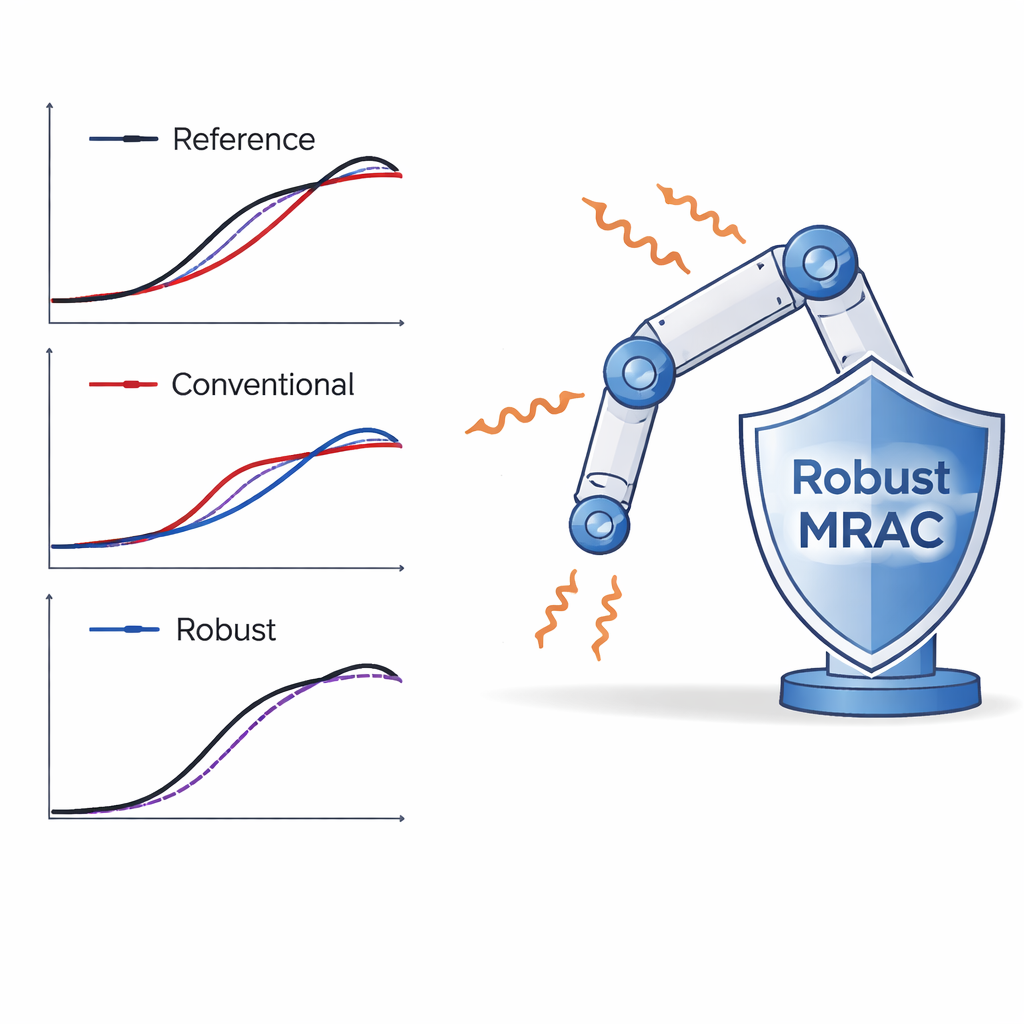
Was das für Roboter im echten Einsatz bedeutet
Für den Laien lautet die Quintessenz, dass diese Arbeit einen intelligenteren „Autopiloten“ für Industrieroboterarme bietet — einen, der weiter lernt und sich anpasst, ohne bei Veränderungen der Umgebung oder Nutzlast instabil zu werden. Durch die Zerlegung der komplexen Dreigelenksdynamik in einfachere Teile und das Hinzufügen von Schutzmechanismen zum Lernprozess erlaubt der vorgeschlagene robuste adaptive Regler dem Roboter, gewünschte Bahnen genau zu verfolgen und dabei angemessene Motorleistung zu verwenden, selbst unter Störungen und Unsicherheit. Damit rückt die praktische Robotik einen Schritt näher an wirklich plug-and-play-fähige Systeme, die schnell umgerüstet werden können, unerwartete Bedingungen bewältigen und sicher neben Menschen arbeiten, ohne ständiges Nachjustieren durch Experten.
Zitation: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Schlüsselwörter: Steuerung von Roboterarmen, adaptive Regelung, industrielle Robotik, Trajektorienverfolgung, robuste Regelung