Clear Sky Science · de
Ein intelligenter, bio‑inspirierter, multi‑zieliger und skalierbarer UAV‑unterstützter Clustering‑Algorithmus in fliegenden Ad‑hoc‑Netzen
Klügere Drohnenschwärme am Himmel
Stellen Sie sich Flotten von Drohnen vor, die zusammenarbeiten, um nach einem Erdbeben Überlebende zu suchen, Waldbrände zu überwachen oder Felder zu beobachten. Damit das gut funktioniert, müssen Hunderte fliegender Roboter schnell miteinander kommunizieren, ohne ihre Batterien zu erschöpfen. Dieses Papier untersucht, wie man solche „Drohnen‑Schwärme“ so organisiert, dass sie verbunden bleiben, schnell reagieren und länger in der Luft bleiben — und zwar indem es Ideen aus einer unerwarteten Quelle übernimmt: dem Jagdverhalten des Sekretärvogels.
Warum fliegende Netze schwer zu bändigen sind
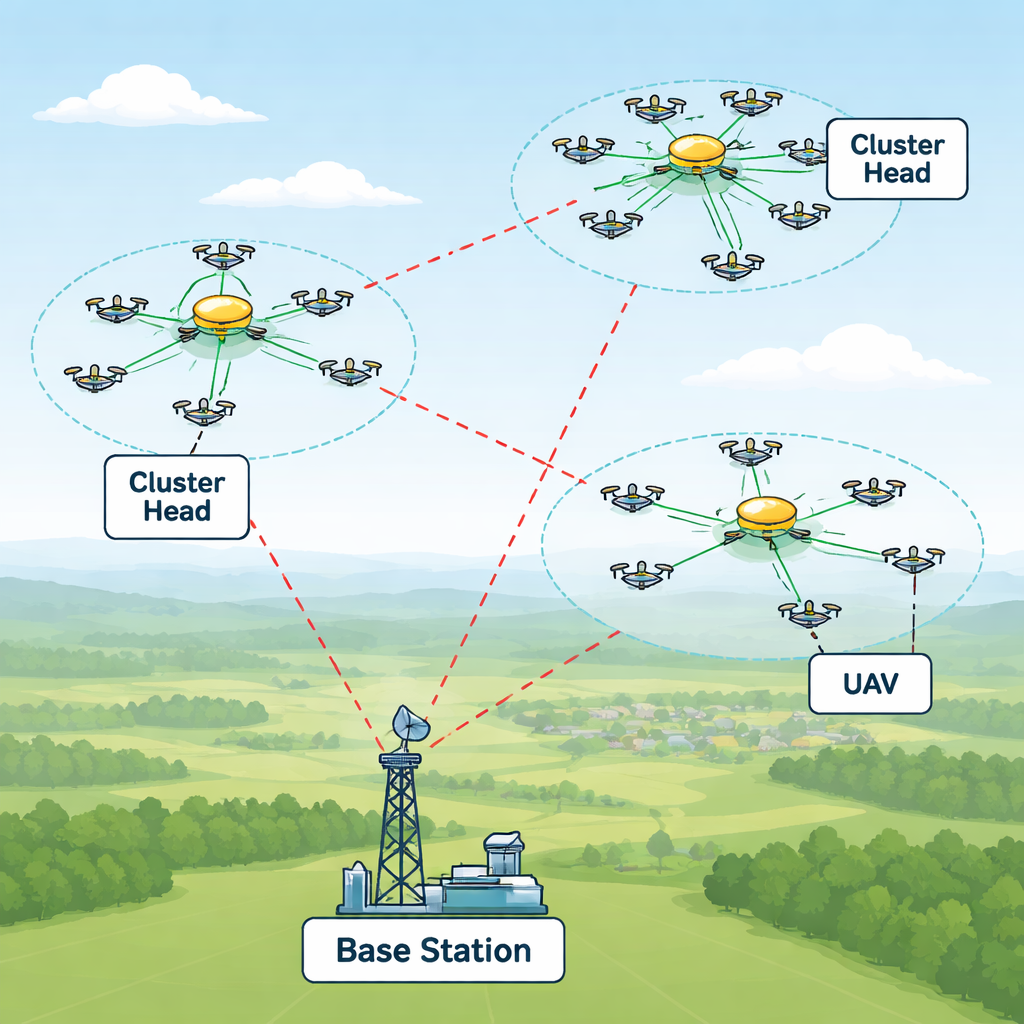
Moderne Drohnen können das bilden, was Ingenieure Flying Ad Hoc Networks oder FANETs nennen — drahtlose Netze, die nur am Himmel existieren. Anders als Bodennetze bewegen sich diese Drohnen in drei Dimensionen, ändern schnell ihre Richtung und sind auf begrenzte Batteriekapazität angewiesen. Wenn jede Drohne versuchen würde, direkt mit jeder anderen zu kommunizieren, würden Signale kollidieren, Verzögerungen zunehmen und die Batterien schnell leer sein. Eine gängige Lösung ist das Bilden von Clustern: kleine Gruppen von Drohnen, die von einem „Cluster‑Kopf“ geführt werden, der lokale Nachrichten koordiniert und mit anderen Cluster‑Köpfen kommuniziert. Aber zu entscheiden, welche Drohnen Anführer werden sollen und wann diese Rollen neu verteilt werden müssen, während der Schwarm sich bewegt, ist ein ständig wechselndes Rätsel.
Tricks von einem Raubvogel ausleihen
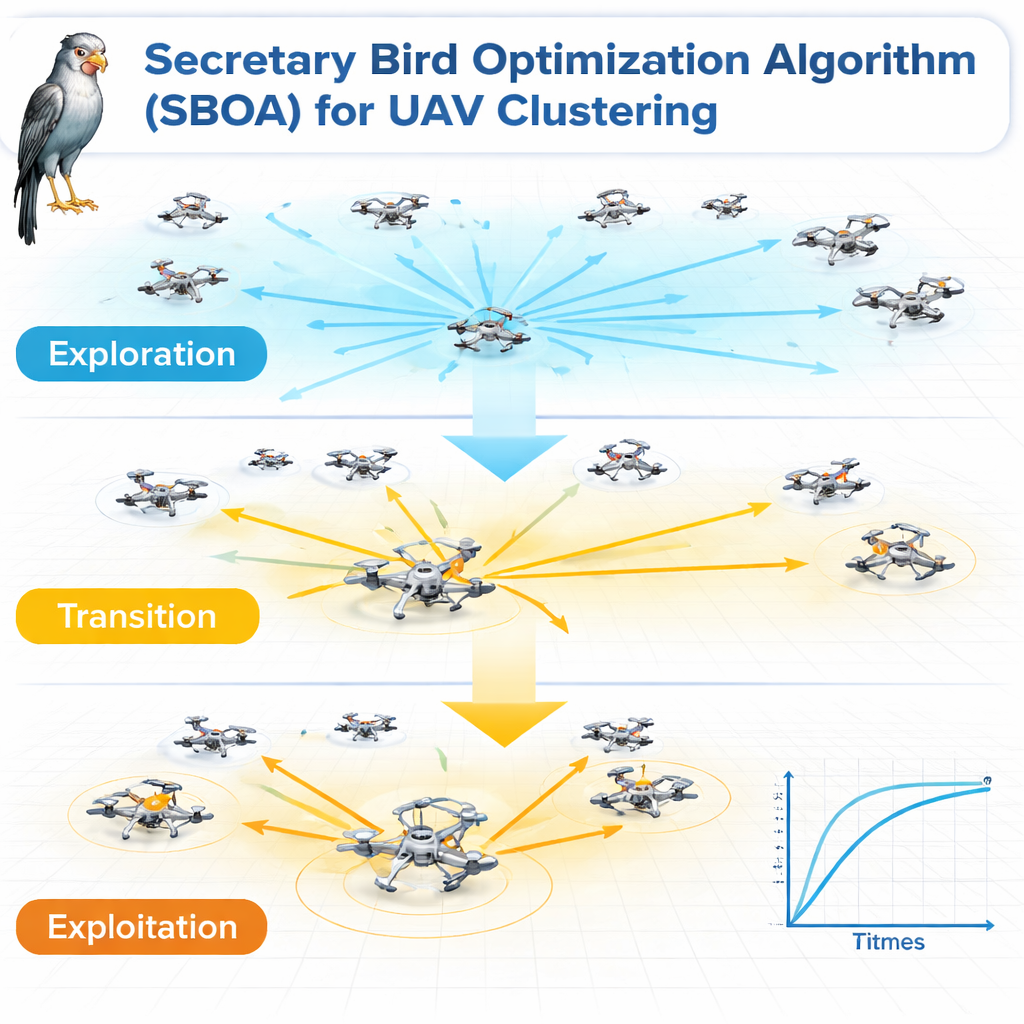
Die Autoren greifen auf eine bio‑inspirierte Idee zurück, die Secretary Bird Optimization Algorithm (SBOA) genannt wird. Sekretärvögel sind dafür bekannt, weite Bereiche zu durchkämmen und dann zuzuschlagen, indem sie ihre Beute mit präzisen Tritten attackieren. SBOA kopiert dieses Muster in Softwareform. Zunächst untersucht es viele mögliche Varianten, wie Cluster‑Köpfe im Schwarm zugewiesen werden können, und konzentriert sich dann schrittweise auf die vielversprechendsten Optionen. In jedem Schritt werden drei Fragen gestellt: Sind die Drohnen innerhalb jedes Clusters nah genug beieinander? Haben die gewählten Anführer noch genügend Batterie? Und ist die Arbeitslast fair verteilt, sodass kein Anführer überlastet wird, während andere untätig sind? Indem dieses Problem als multi‑zielige Aufgabe behandelt wird, balanciert der Algorithmus Entfernung, Energie und Fairness gleichzeitig aus.
Drohenschwärme in virtuellen Welten testen
Um zu prüfen, ob diese vom Vogel inspirierte Strategie hilft, erstellte das Team detaillierte Computersimulationen. Sie setzten zwischen 30 und 160 Drohnen in 3D‑virtuelle Räume unterschiedlicher Größe ab — von einem Quadratkilometer bis hin zu einer großen 15×15‑Kilometer‑Box — und ließen sie mit einem einfachen Mobilitätsmodell fliegen. Die Kommunikationsreichweite variierte zwischen 100 und 900 Metern. In jedem Szenario trat SBOA gegen drei fortgeschrittene Alternativen an, die ebenfalls natürliches Verhalten nachahmen: Fire Hawk Optimization (FHOA), Portia Spider Optimization (PSOA) und ein spermienbefruchtungsbasiertes multi‑zieliges Verfahren (MOSFP). Die Forscher verfolgten, wie viele Cluster sich bildeten, wie schnell eine stabile Struktur entstand, wie gleichmäßig die Führungsaufgaben verteilt waren und wie viel „Fitness“ die Lösungen erreichten, wobei Entfernung, Energieverbrauch und Ausgewogenheit zu einem einzigen Wert kombiniert wurden.
Was die Simulationen zeigten
In fast allen Tests lag SBOA vorn. Es erzielte regelmäßig bis zu 15 % höhere Fitness als die Konkurrenten, mit etwa 10 % effizienterem Clustering und ungefähr 40 % besserer Lastenverteilung unter den Anführern. In zeitbasierten Experimenten erreichte der sekretärvogel‑ähnliche Ansatz in weniger Simulationsschritten ein stabiles Cluster‑Muster, besonders wenn die Anzahl der Drohnen zunahm. Selbst in dünn besiedelten, großen 3D‑Bereichen, in denen die Drohnen weit auseinander liegen, hielt SBOA mehr als 85 % der bestmöglichen Fitness, was zeigt, dass es sich sowohl an dichte Schwärme als auch an weit verteilte Formationen anpassen kann. Visuelle Hilfsmittel wie Oberflächenplots, t‑SNE‑Karten und Violin‑Plots bestätigten, dass SBOA engere, deutlichere Cluster mit geringerer Variation in der Arbeitsbelastung der Anführer erzeugte als die anderen Methoden.
Von der Simulation zu echten Einsätzen
Die Studie kommt zu dem Schluss, dass eine vom Sekretärvogel inspirierte Strategie ein starkes Rezept zur Steuerung von Drohnenschwärmen bietet: Sie hält Drohnen effizient gruppiert, verteilt die Arbeit fair unter den Anführern und reagiert glatt auf sich ändernde Bedingungen. Für den Laien bedeutet das, dass künftige Flotten von Rettungs-, Landwirtschafts‑ oder Überwachungsdrohnen länger verbunden bleiben, weniger Batterie verschwenden und zuverlässiger reagieren könnten, einfach indem sie sich besser organisieren. Die Autoren weisen darauf hin, dass reale Faktoren — wie Windböen, GPS‑Fehler und Funkstörungen — noch getestet werden müssen, und sie schlagen vor, als Nächstes lernbasierte Bewegungsprognosen und intelligentere Routing‑Verfahren hinzuzufügen. Aber als Schritt zu robusten Luftnetzwerken zeigt SBOA, dass das Beobachten, wie die Natur auf der Savanne jagt, unsere Roboterhelfer am Himmel deutlich leistungsfähiger machen kann.
Zitation: Aslam, Z., Rahman, T., Husnain, G. et al. An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks. Sci Rep 16, 4870 (2026). https://doi.org/10.1038/s41598-026-35196-z
Schlüsselwörter: Drohnen‑Schwärme, drahtlose Kommunikation, bio‑inspirierte Algorithmen, energieeffiziente Vernetzung, fliegende Ad‑hoc‑Netze