Clear Sky Science · de
Lokalisierung von Pflanzenwachstumspunkten durch epochengestützte Prior-Abschwächung
Intelligenteres Jäten für eine hungernde Welt
Während die Weltbevölkerung wächst, stehen Landwirtinnen und Landwirte unter dem Druck, mehr Nahrungsmittel zu produzieren und gleichzeitig weniger Chemikalien einzusetzen und die Umwelt zu schützen. Eine große Herausforderung ist, Unkraut zu beseitigen, ohne wertvolle Nutzpflanzen zu schädigen. Dieser Artikel stellt eine neue Trainingsstrategie der künstlichen Intelligenz (KI) vor, die Maschinen dabei unterstützt, genau die Stellen zu finden, an denen Pflanzen wachsen – ihre Wachstumspunkte – sodass Werkzeuge wie Laser- oder Elektrojäter Unkraut mit chirurgischer Präzision angreifen und Kulturpflanzen verschonen können.
Warum Wachstumspunkte wichtig sind
Unkräuter rauben Nutzpflanzen Licht, Wasser und Nährstoffe, verringern Erträge und gefährden die Ernährungssicherheit. Landwirte greifen oft zu Herbiziden, doch deren Übernutzung wirft Gesundheits-, Umwelt- und Resistenzprobleme auf. Neue Verfahren wie Flammen-, Elektro- und Laserjäten versprechen sauberere Kontrolle, indem Pflanzen mechanisch oder mit Energie zerstört werden. Damit sie sicher funktionieren, müssen diese Systeme Kulturpflanzen von Unkräutern unterscheiden und dann die winzigen Wachstumspunkte lokalisieren – häufig an Stielgabeln –, an denen Schäden am wirkungsvollsten sind. Viele bestehende Computer-Vision-Tools können ganze Pflanzen erkennen, tun sich jedoch schwer damit, diese kleinen Zielpunkte genau und schnell genug für Echtzeitanwendungen im Feld zu finden.
Einfachen Farbhinweisen mächtige Orientierung entlocken
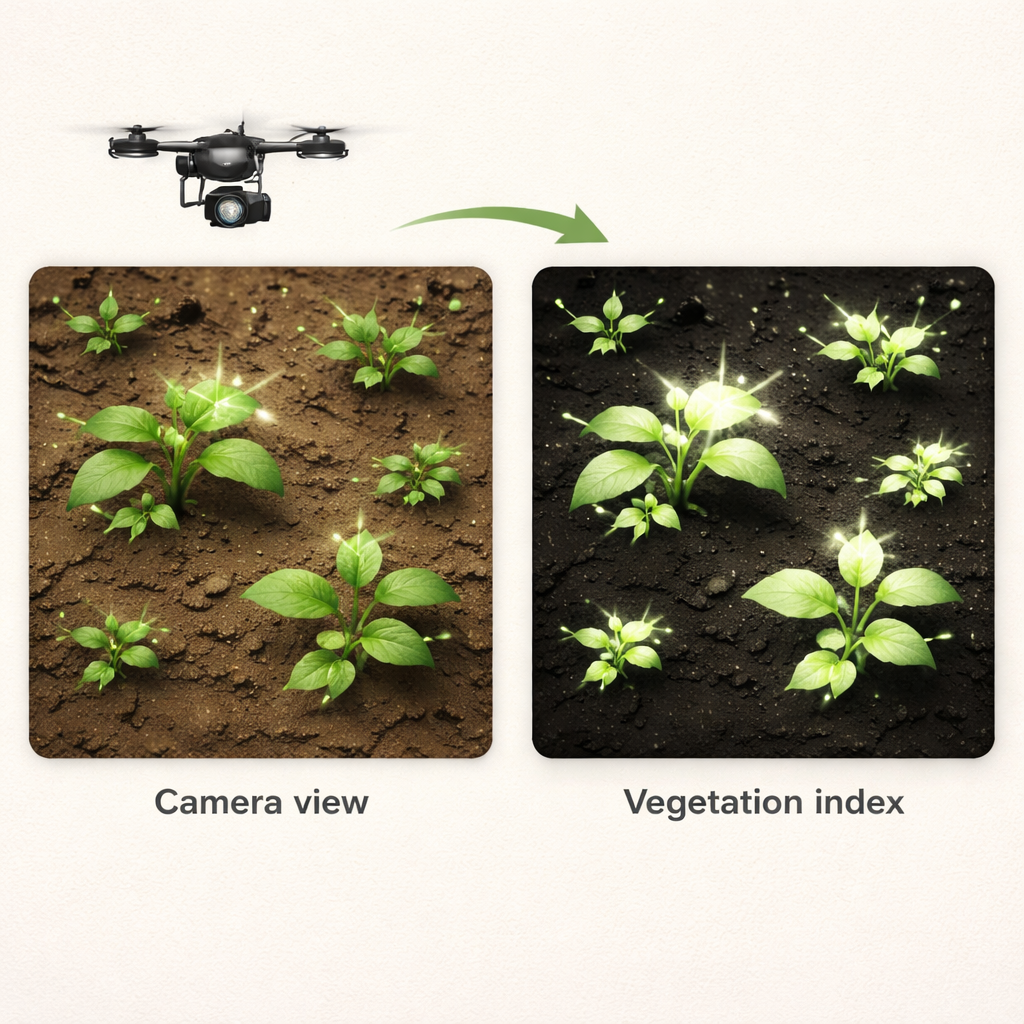
Die Forschenden bauen auf einer einfachen Idee auf: grüne Pflanzen sehen in herkömmlichen Farbaufnahmen anders aus als brauner Boden. Eine bekannte Farbformel, der ExG-ExR Vegetationsindex, kombiniert die Rot-, Grün- und Blauwerte jedes Pixels, sodass Pflanzenpixel als hell hervorstechen und Bodenpixel dunkel erscheinen. Dieser Index lässt sich mit jeder Standardkamera ohne zusätzliche Sensoren berechnen. Im neuen System wird dieser Vegetationsindex den üblichen drei Farbkanälen als vierter Eingang zu einem populären KI-Detektor namens YOLO-Pose hinzugefügt. Diese vierkanalige Sicht gibt dem Modell ein klareres Bild davon, wo Pflanzen sind, und hilft ihm, sich bei der Suche nach Wachstumspunkten auf die richtigen Bereiche zu konzentrieren.
Die KI von einfach zu schwer lehren
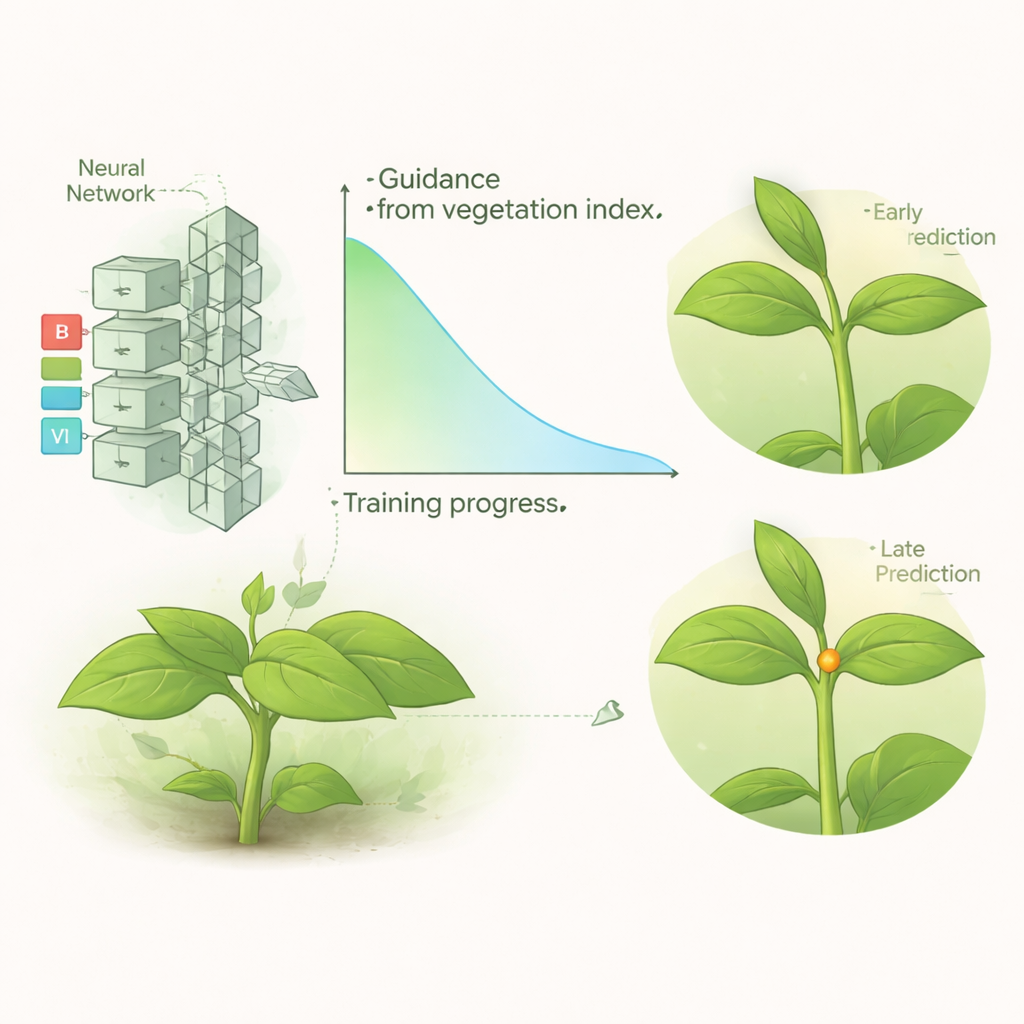
Mehr Informationen bereitzustellen reicht nicht aus; das Modell muss auch lernen, sie sinnvoll zu nutzen. Das Team führt eine "epochengestützte Prior-Abschwächung" (EPA) ein, inspiriert davon, wie Menschen lernen. Zu Beginn des Trainings wird das Modell stark dazu angeleitet, seine vorhergesagten Wachstumspunkte innerhalb von Pflanzenregionen zu halten, wobei der Vegetationsindex als Leitfaden dient. Platziert es einen Punkt im Boden, verhängt der Trainingsalgorithmus eine stärkere Strafe; liegt der Punkt in Pflanzenpixeln, ist die Strafe geringer. Im Verlauf des Trainings wird diese Führung schrittweise nach einem glatten Plan abgeschwächt, sodass das Modell sich weniger auf den groben Farbhint und mehr auf feine visuelle Muster stützen kann, die es gelernt hat. Am Ende wird die KI nicht mehr zwangsläufig zu den grünsten Pixeln hingelenkt, die nicht unbedingt die echten Wachstumspunkte sind, sondern kann die Positionen eigenständig feinjustieren.
Die Idee in realen Feldern beweisen
Um ihren Ansatz zu testen, trainierten die Autorinnen und Autoren Modelle auf zwei realen Datensätzen mit Tausenden von Feldbildern, mehreren Kulturpflanzenarten und vielen Unkrautarten. Sie verglichen Versionen des YOLO-Pose-Modells mit und ohne zusätzlichen Vegetationskanal sowie die EPA-Trainingsstrategie. Allein das Hinzufügen des Vegetationsindex brachte moderate Verbesserungen, aber in Kombination mit EPA zeigte sich eine deutliche Steigerung der Genauigkeit bei der Lokalisierung von Wachstumspunkten – etwa 2,4 Prozentpunkte in einem standardisierten Detektionsscore – ohne die Fähigkeit des Modells zu beeinträchtigen, ganze Pflanzen in Begrenzungsrahmen zu erfassen. Der zusätzliche Rechenaufwand war minimal (weniger als ein halbes Prozent der Gesamtkosten), wodurch die Methode für ressourcenbegrenzte Feldroboter geeignet ist. Tests unter unterschiedlichen Lichtverhältnissen, Bodenfeuchten und sogar mit verschiedenen YOLO-Modellversionen zeigten, dass die Strategie breit anwendbar ist, wenngleich sie empfindlich darauf reagiert, wie stark und wie lange die Prior-Führung angewandt wird.
Was das für die Zukunft der Landwirtschaft bedeutet
Für Nichtfachleute lautet die wichtigste Erkenntnis: Eine kleine Änderung in der Art, wie wir KI trainieren – zunächst ein einfacher, farbbasierter Hinweis und dann schrittweises Loslassen der Führung – kann Maschinen deutlich besser darin machen, die genauen Stellen an Pflanzen zu finden, an denen Eingriffe wirkungsvoll sind. Diese Verbesserung der Lokalisierung von Wachstumspunkten könnte künftigen Jäterobotern ermöglichen, Elektroimpulse oder Laserstrahlen präzise auf Unkraut zu richten und dabei Kulturpflanzen zu schonen, wodurch der Herbizideinsatz und die Umweltbelastung verringert würden. Dieselbe Strategie lässt sich möglicherweise auf andere pflanzliche Signale und KI-Modelle übertragen und ebnet so den Weg für intelligentere, zuverlässigere Vision-Systeme, die eine nachhaltige, hochpräzise Landwirtschaft unterstützen.
Zitation: Ma, C., Zhang, Z., Tian, F. et al. Plant growth point localization via epoch-based prior annealing. Sci Rep 16, 4994 (2026). https://doi.org/10.1038/s41598-026-35009-3
Schlüsselwörter: Präzisionslandwirtschaft, Unkrautbekämpfung, Computer Vision, Tiefes Lernen, Pflanzenwachstumspunkte