Clear Sky Science · de
Erklärbare KI mit EDA zur V2I-Dämpfungsprognose
Warum intelligentere Fahrzeug‑zu‑Infrastruktur‑Verbindungen wichtig sind
Moderne Autos kommunizieren zunehmend mit der sie umgebenden Infrastruktur und senden sowie empfangen drahtlose Nachrichten zu Ampeln, Straßenstationen und anderer Infrastruktur. Diese Verbindungen unterstützen Sicherheitswarnungen, Verkehrssteuerung und künftig das autonome Fahren. Stadtstraßen sind jedoch schwierige Funkumgebungen: hohe Gebäude, Bäume, Brücken und Lastwagen können das Signal schwächen oder blockieren. Diese Arbeit zeigt, wie sich dieses Signalabschwächen vorhersagen lässt — nicht nur genau, sondern auch nachvollziehbar für Ingenieurinnen, Ingenieure und Aufsichtsbehörden, denen diese Systeme vertrauenswürdig erscheinen müssen.
Die Daten ansehen, bevor man dem Modell vertraut
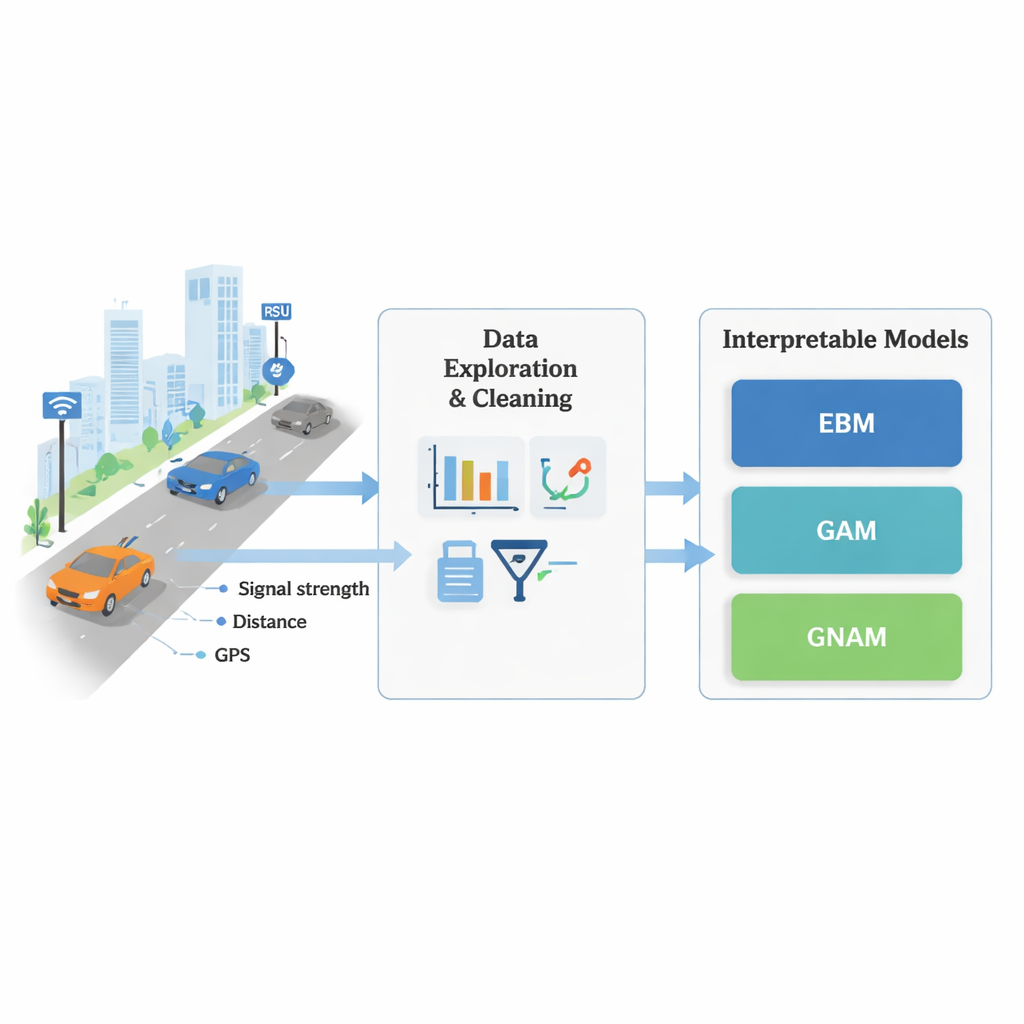
Die Autorinnen und Autoren beginnen mit einer großen Messkampagne in Bologna, Italien, bei der mit Antennen ausgestattete Fahrzeuge 24 unterschiedliche städtische Szenen befuhren — gerade Straßen, Kreisverkehre, baumbestandene Alleen, Brücken und stark befahrene Bereiche — während sie mit Sendern am Straßenrand kommunizierten. Aus diesen Messungen leiten sie den „Pfadverlust“ ab, also wie stark das Signal auf dem Weg von der Infrastruktur zum Fahrzeug abnimmt. Bevor ein Vorhersagemodell gebaut wird, führen sie eine sorgfältige explorative Datenanalyse durch: Verteilungsplots, Korrelationsprüfungen und die Aufteilung der Daten in sieben repräsentative Fallstudien wie freie Sicht, blockierte Sicht und Vegetation. Dieser Schritt offenbart Rauschen, Ausreißer und verborgene Muster, die für vertrauenswürdige Vorhersagen adressiert werden müssen.
Die reale Funk‑Chaotik aufräumen
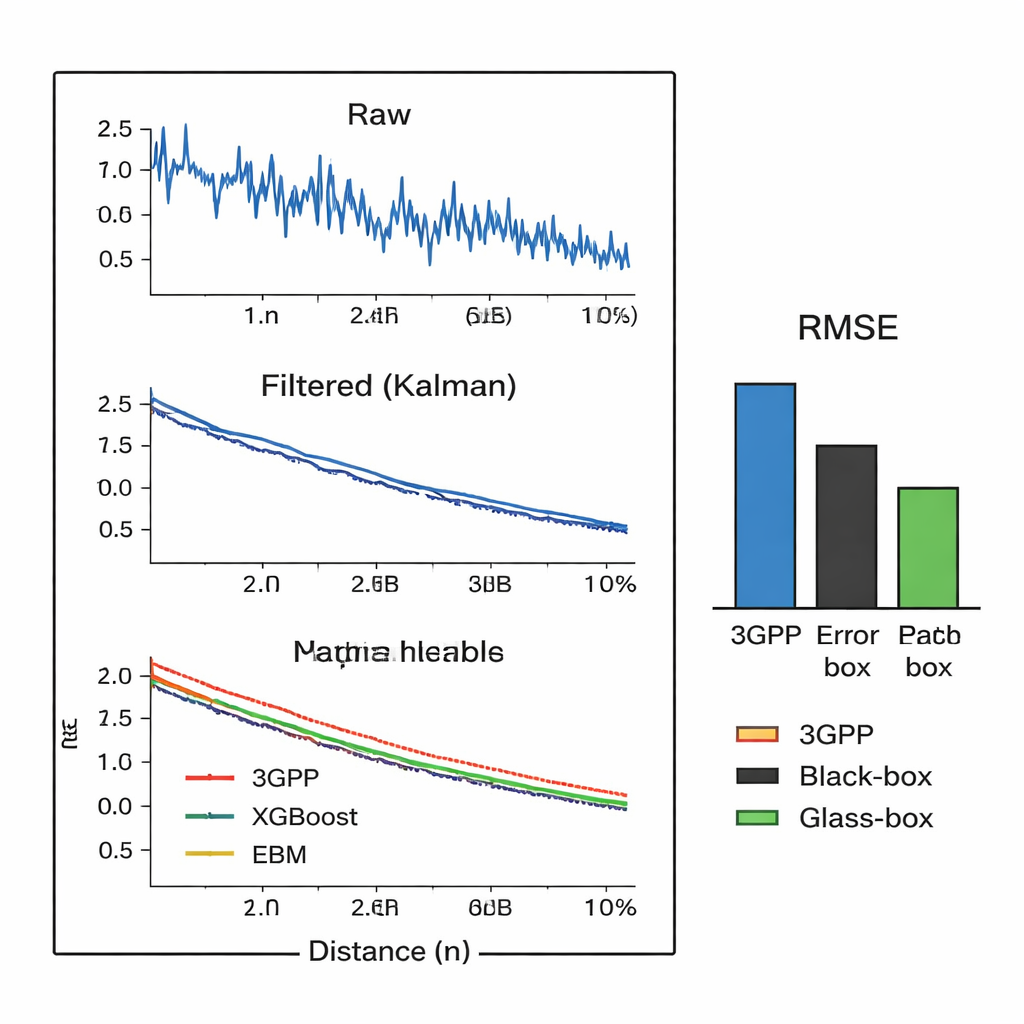
Reale Funksignaldaten sind voll von Unregelmäßigkeiten, verursacht durch Messfehler, Gebäudereflektionen und plötzliche Blockaden durch vorbeifahrende Fahrzeuge. Die Forschenden entwickeln eine Vorverarbeitungs-Pipeline, um diese Chaotik zu zähmen. Zuerst skalieren sie alle Eingangsmerkmale — wie Entfernung, Fahrzeugposition und Geschwindigkeit — so, dass sie vergleichbar sind. Anschließend entfernen sie Ausreißer mit einer robusten statistischen Regel, die extreme, inkonsistente Messwerte abschneidet. Schließlich wenden sie einen optimierten Kalman‑Filter an, ein klassisches Werkzeug der Regelungstechnik, um das Signal über die Entfernung zu glätten und gleichzeitig die zugrundeliegenden Trends zu erhalten. Durch Abstimmung der Filterparameter zur Maximierung der Leistung nachfolgender Modelle zeigen sie, dass dieser Reinigungsprozess die Vorhersagefehler mehr als halbieren und stabile Muster offenlegen kann, aus denen Modelle lernen können.
Die Black‑Box der KI öffnen
Traditionelle Formeln für Funkplanung, wie die 3GPP‑ und Dual‑Slope‑Modelle, sind einfach und transparent, erfassen aber oft nicht die Komplexität dichter Städte. Beliebte Machine‑Learning‑Verfahren wie Random Forests und XGBoost erreichen zwar hohe Genauigkeit, wirken jedoch wie Black‑Boxes: Sie liefern Vorhersagen, bieten aber wenig Einsicht in deren Ursachen. Diese Arbeit konzentriert sich auf einen Mittelweg: „Glas‑Box“‑Modelle, die mathematisch einfach genug bleiben, um interpretiert zu werden, dabei aber nichtlineares Verhalten erfassen. Die Autorinnen und Autoren testen drei solche Modelle — Explainable Boosting Machines, Generalized Additive Models und Generalized Neural Additive Models — neben gängigen Black‑Box‑Algorithmen und klassischen Formeln und verwenden dabei strikte Trainings‑Test‑Aufteilungen sowie 5‑fache Kreuzvalidierung über alle Szenarien hinweg.
Was den Signalverlust auf realen Straßen bestimmt
Durch die Kombination der bereinigten Daten mit interpretierbaren Modellen können die Forschenden herausarbeiten, was in Städten am wichtigsten für den Pfadverlust ist. Erwartungsgemäß dominiert die Entfernung zwischen Fahrzeug und Straßenstation, doch auch die genauen GPS‑Koordinaten des Fahrzeugs und die Zeit spielen eine Rolle, da Straßenlayout und Verkehrsverhalten den Kanal formen. In komplexen Szenen — etwa NLOS‑Abschnitten hinter Gebäuden, unter Brücken, durch Baumkronen oder bei starkem Lkw‑Verkehr — erreichen die Glas‑Box‑Modelle eine Genauigkeit, die mit den besten Black‑Box‑Modellen vergleichbar oder leicht darunter liegt, zeigen dafür aber deutlich, wie jeder Faktor die Vorhersage nach oben oder unten beeinflusst. Die Studie bewertet außerdem Rechenzeit und Energiebedarf und kommt zu dem Schluss, dass diese interpretierbaren Modelle schnell und genügsam genug für den Echtzeit‑Einsatz in Straßenstationen und Bordgeräten sind.
Sicherere, transparentere Fahrzeugnetze bauen
Für eine allgemeine Leserschaft lautet die Kernbotschaft: Wir können jetzt vorhersagen, wie gut ein Fahrzeug in stark besiedelten Städten die Infrastruktur „hört“, und zwar mit hoher Präzision und Klarheit. Anstelle sich auf undurchsichtige KI zu verlassen, die kaum jemand vollständig versteht, kombiniert dieses Rahmenwerk Datenexploration, Rauschfilterung und erklärbare Modelle, um nahezu state‑of‑the‑art Genauigkeit zu liefern und gleichzeitig genau aufzuzeigen, welche Faktoren wichtig sind. Diese Transparenz ist entscheidend für sicherheitskritische Vehicle‑to‑Everything‑Systeme, bei denen Ingenieurinnen, Regulierungsbehörden und sogar Gerichte Entscheidungen prüfen müssen. Die Arbeit weist einen Weg zu künftigen 5G/6G Fahrzeug‑zu‑Straße‑Netzen, die nicht nur schnell und zuverlässig, sondern auch rechenschaftspflichtig und leichter zu entwerfen, zu testen und zu vertrauen sind.
Zitation: Ameur, M.B., Chebil, J., Habaebi, M.H. et al. Explainable AI with EDA for V2I path loss prediction. Sci Rep 16, 4954 (2026). https://doi.org/10.1038/s41598-026-34987-8
Schlüsselwörter: Vehicle-to-Infrastructure, Pfadverlustvorhersage, erklärbare KI, Funkkanäle, 5G V2X