Clear Sky Science · de
Ein offener Benchmark-Datensatz für maschinelles Lernen und intelligente Trajektorienoptimierung bei Starrflüglern unbemannter Luftfahrtsysteme
Warum intelligentere Drohnenflüge wichtig sind
Von Feldkartierungen bis zu Such‑und‑Rettungs‑Einsätzen übernehmen Starrflügler‑Drohnen zunehmend heimlich wichtige Aufgaben hoch über unseren Köpfen. Diese Flugzeuge zuverlässiger zu machen und ihre Abhängigkeit von menschlichen Piloten zu verringern, könnte sicherere Lieferungen, präzisere Umweltüberwachung und robustere Einsätze in Notfällen oder Konfliktzonen ermöglichen. Der Fortschritt wird jedoch zunehmend nicht durch Ideen gebremst, sondern durch den Mangel an realen Daten. Dieser Artikel stellt einen neuen offenen Datensatz mit Hunderten autonomer Drohnenflüge vor, der Ingenieuren und Studierenden überall erlaubt, intelligente Flugalgorithmen auf einer gleichen, reichhaltigen Grundlage zu entwickeln und zu testen.
Ein fliegendes Labor für reale Missionen
Die Autoren erstellten ihren Datensatz anhand eines robusten motorseglerähnlichen Flugzeugs, dem Volantex Ranger 2400. Mit einer Spannweite von zweieinhalb Metern, einer effizienten Flügelform und einem geräumigen Rumpf kann das Fluggerät moderne Elektronik tragen und gleichzeitig lange, stabile Missionen durchführen. Angetrieben wird es von einem heckmontierten Elektromotor und einem kundenspezifischen Lithium‑Ion‑Akkupack, das auf Ausdauer statt auf kurze Leistungsschübe ausgelegt ist. Das Team flog diese Plattform im vollautonomen Modus und nutzte vorgeplante Routen, die zentrale Flugphasen abdecken: Start, gerade Reisestrecken, enge Kurven, dynamische Manöver und automatische Landungen. Dieses kontrollierte, aber realistische Setup verwandelt den Ranger in ein fliegendes Labor, das sich wie kleine operative Drohnen verhält, die in zivilen und militärischen Umgebungen eingesetzt werden.
Zwei Rechenkerne, ein Flugzeug
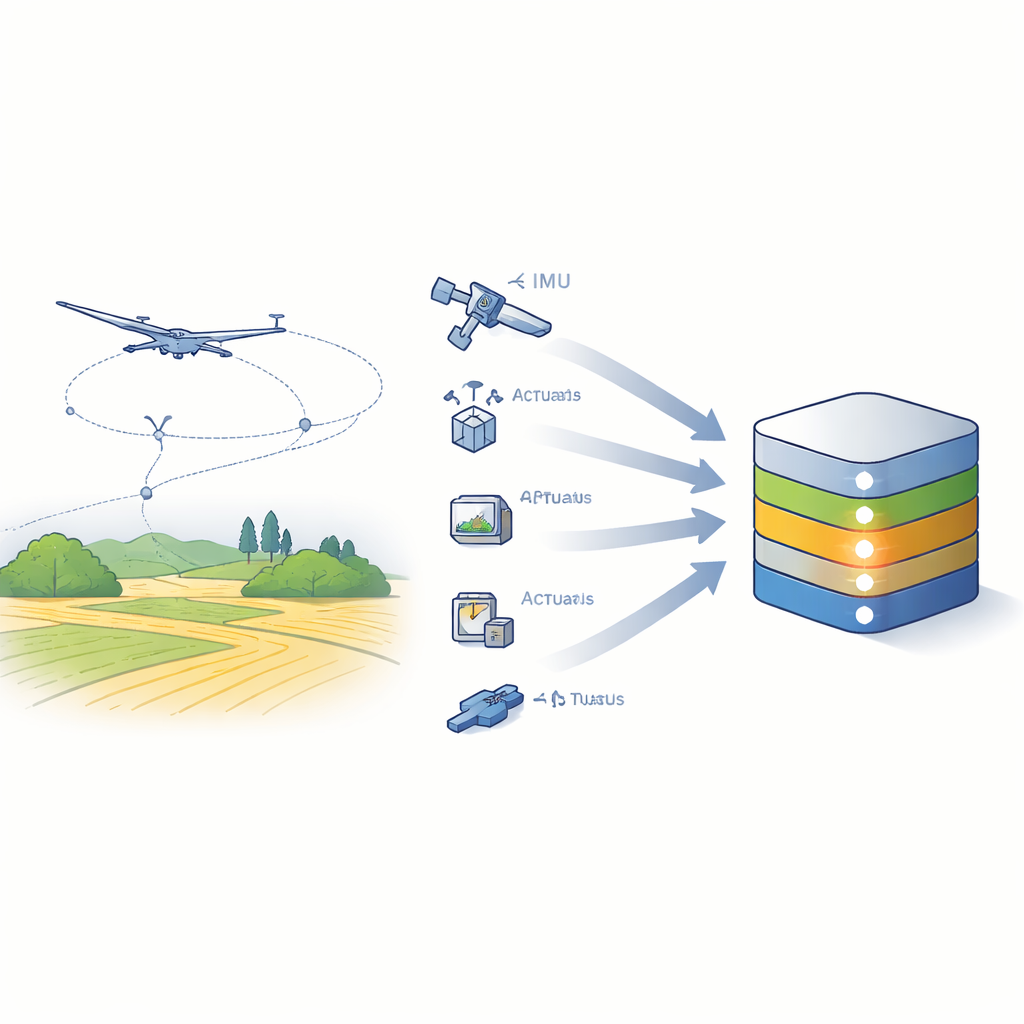
Um ein breites Spektrum an Anwendungsfällen abzubilden, statteten die Forschenden denselben Rumpf mit zwei sehr unterschiedlichen „Gehirnen“ aus. Eine Konfiguration verwendet einen kompakten, kostengünstigen SpeedyBee F405‑Flugcontroller, vergleichbar mit der Elektronik, die Hobbyisten in selbstgebauten Drohnen einsetzen. Die andere kombiniert einen professionellen Pixhawk 6X‑Autopiloten mit einem leistungsfähigen Jetson Orin NX‑Rechner, der in der Lage ist, anspruchsvolle KI‑Software an Bord auszuführen. Beide Systeme protokollieren detaillierte Telemetrie, einschließlich Bewegungen aus Trägheitssensoren, GPS‑Position und -Geschwindigkeit, Höhe, Luftgeschwindigkeit, Steuerflächenbefehle, Batteriestatus und Flugmodus, in Raten, die hoch genug sind, um die Flugbewegung fein aufzulösen. Indem das Luftfahrzeug gleich bleibt und nur die Elektronik ausgetauscht wird, erlaubt der Datensatz Forschenden, zu untersuchen, wie unterschiedliche Rechen‑ und Messfähigkeiten an Bord das Flugverhalten beeinflussen.
Was im Datensatz enthalten ist
Die resultierende IDF‑DS‑Sammlung umfasst 240 autonome Flüge, etwa 32 Stunden Flugzeit und Dutzende Millionen aufgezeichneter Messwerte. Jeder Flug ist mit einer konsistenten Ordnerstruktur abgelegt, sodass Nutzer schnell das Hauptlog, den Missionsplan, die Reglerkonfigurationen und eine sofort einsehbare GPS‑Spur finden können. Eine Missionsfamilie folgt einem Zickzackmuster über ein rechteckiges Feld, ideal für wiederholbare Vergleiche oder das Training prädiktiver Modelle. Eine andere zieht eine rennstreckenähnliche Schleife nach, inspiriert von einer bekannten MotoGP‑Piste, mit scharfen Kurven, weiten Bögen und Geraden, die den Autopiloten herausfordern. Für jede Konfiguration und Mission erfassen die Logs, wie das Flugzeug tatsächlich geflogen ist, nicht nur, wie es fliegen sollte.
Rohflüge in Erkenntnisse verwandeln
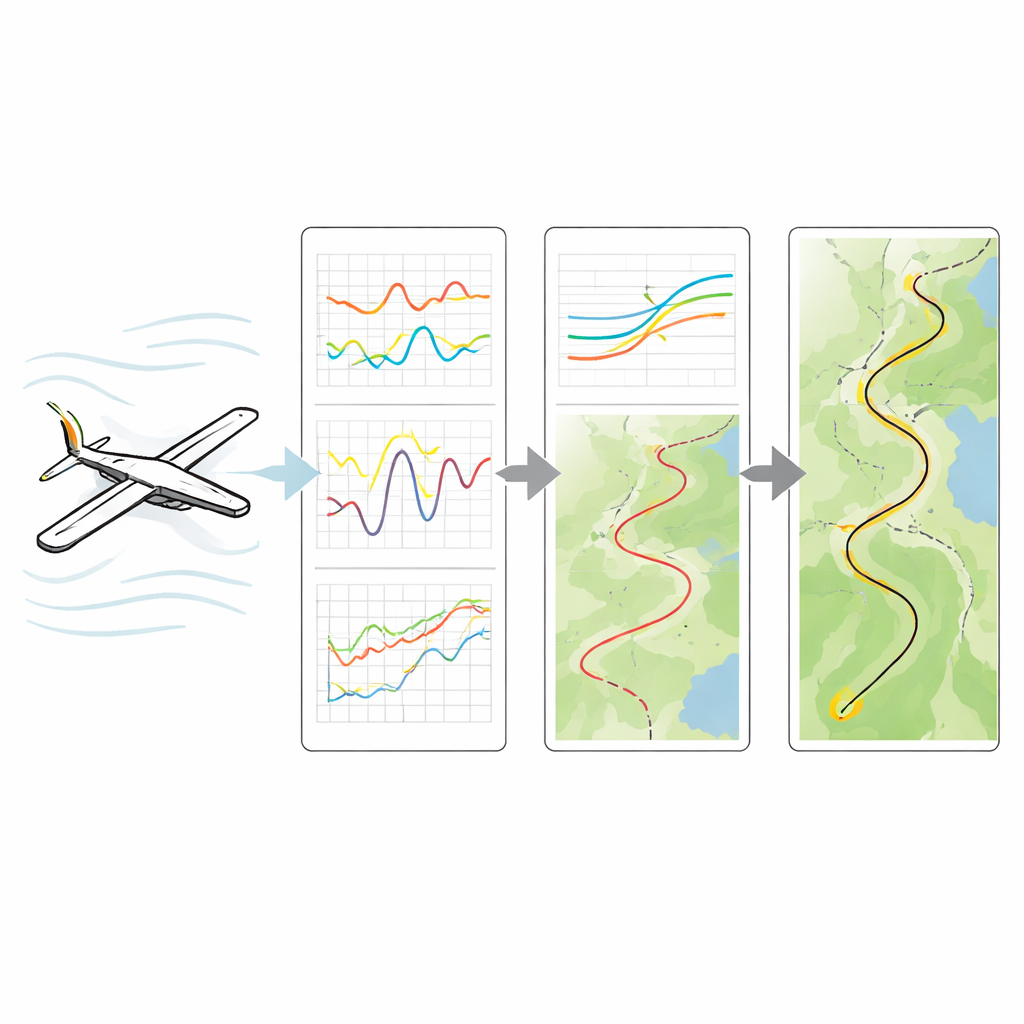
Um zu zeigen, was sich mit diesem Fundus anstellen lässt, führen die Autoren mehrere Beispielanalysen durch. Sie prüfen die Qualität der an Bord befindlichen Trägheitssensoren, indem sie diese mit Beschleunigungen und Rotationen vergleichen, die aus der GPS‑Trajektorie abgeleitet wurden, und bestätigen damit, dass die Messungen zuverlässig genug sind, um als „Ground Truth“ für das Modelltraining zu dienen. Sie untersuchen, wie gut der Autopilot Geschwindigkeiten in drei Richtungen schätzt, wie genau das Flugzeug seinem geplanten Kurs folgt und wie viel elektrische Leistung bei Steigflug, Kurven und gleichmäßigem Reiseflug verbraucht wird. Durch die Kombination von Luftgeschwindigkeit, Bodengeschwindigkeit und Lage werden sogar die Winde rekonstruiert, denen das Flugzeug entlang seiner Route ausgesetzt war, sodass Böen und Seitenwinde allein aus an Bord gemessenen Daten sichtbar werden. Ein weiterer Anwendungsfall skizziert, wie dieselben Datenströme ein KI‑Modell trainieren könnten, um Positionen zu schätzen, wenn Satellitennavigation nicht verfügbar ist.
Wie diese Ressource zukünftigen Flügen hilft
Alltagspraktisch geht es bei dieser Arbeit darum, der Gemeinschaft eine gemeinsame „Black Box“ aus Hunderten Flügen zur Verfügung zu stellen, die jeder öffnen kann. Anstatt dass jedes Team eigene teure Testdaten sammeln – und privat halten – muss, können Forschende und Studierende diesen offenen Datensatz herunterladen und sofort neue Ansätze erforschen, um Drohnen bei GPS‑Ausfall auf Kurs zu halten, Fehler zu erkennen, bevor sie gefährlich werden, oder die Akkulaufzeit durch effizientere Routen zu verlängern. Das Paper selbst baut diese intelligenten Systeme nicht; es schafft das Fundament, das sie benötigen. Für die Leserschaft lautet die Schlussfolgerung, dass Fortschritte in der Luftfahrtautonomie inzwischen genauso sehr von offenen, sorgfältig dokumentierten Flugaufzeichnungen abhängen wie von cleveren Algorithmen – und dieser Datensatz ist ein substantieller Schritt in diese Richtung.
Zitation: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
Schlüsselwörter: Starrflügler-Drohnen, Flugtelemetrie, autonome Navigation, Datensatz für maschinelles Lernen, Trajektorienoptimierung