Clear Sky Science · de
SPICE-HL3: Einzelphotonen-, Trägheits- und Stereo-Kameradaten für die Erkundung hochnordischer Mondlandschaften
Warum Mondschatten für Roboter wichtig sind
Zukünftige Missionen zu den Polarregionen des Mondes wollen gefrorenes Wasser und andere Ressourcen erschließen; diese Gebiete gehören jedoch zu den visuell verwirrendsten Orten im Sonnensystem. Lange, bewegte Schatten, blendende Reflexionen und nahezu vollständige Dunkelheit können die Kameras eines Roboters leicht täuschen. Dieses Papier stellt SPICE‑HL3 vor, einen neuen offenen Datensatz, der in einem innen aufgebauten „Stück des Mondes“ erstellt wurde und Forschenden weltweit erlaubt zu testen, wie Roboter unter diesen harten Polarbedingungen sehen und navigieren—einschließlich mit einer hochmodernen Einzelphotonenkamera, die buchstäblich im Dunkeln sehen kann.
Ein Stück der Mondpole auf der Erde bauen
Da echte Daten von den Mondpolen rar und teuer zu beschaffen sind, baute das Team eine kontrollierte Testanlage namens LunaLab an der Universität Luxemburg. Sie ist eine 11×8 Meter große Innenlandschaft, gefüllt mit grobem Basaltschotter, Felsen und Kratern, umgeben von schwarzen Wänden und Decken, um die lichtabsorbierende, luftleere Umgebung des Mondes nachzuahmen. Ein leistungsstarker, beweglicher Scheinwerfer imitiert die Sonne sehr tief am Horizont und erzeugt lange, scharfe Schatten sowie enorme Helligkeitsunterschiede zwischen sonnenbeschienenen Hängen und pechschwarzen Kraterinneren. Durch Veränderung der Lampenposition und -leistung reproduzierten die Forschenden vier unterschiedliche Beleuchtungsregime—Referenz, Mittag, Morgen/Abenddämmerung und Nacht—ähnlich dem, was ein Rover während eines ganzen Mondtages nahe der Pole erleben würde. 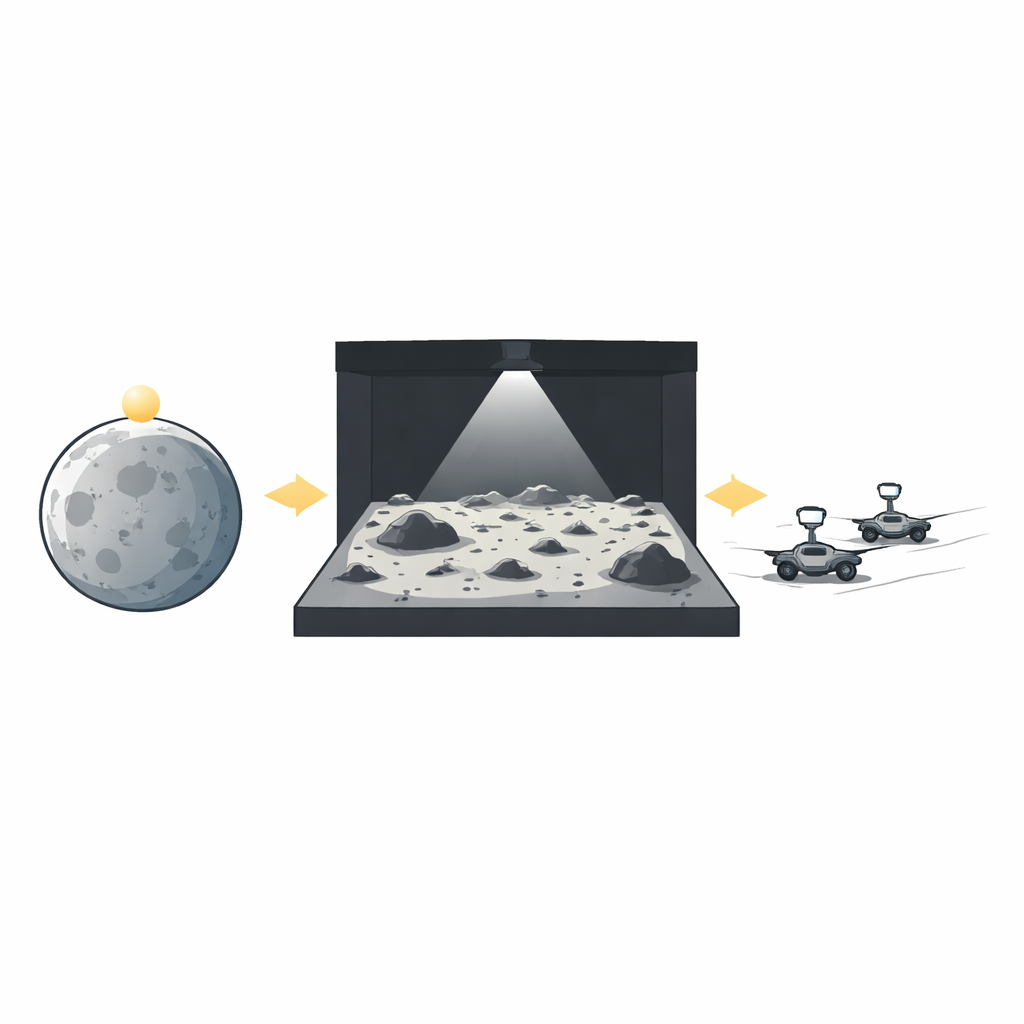
Rover, Sensoren und eine Kamera, die einzelne Photonen zählt
Der Datensatz wurde mit zwei kleinen Radrovern aufgenommen, die verschiedene Kombinationen von Kameras und Bewegungssensoren trugen. Ein Rover führte eine konventionelle monochrome Kamera und eine neuartige Einzelphotonen-Avalanche-Diode-(SPAD)-Kamera; der andere trug eine Stereo-Farb‑und‑Tiefenkamera mit eingebautem Bewegungssensor. Beide Rover protokollierten Radumdrehungen und Trägheitsdaten, während ein übergeordnetes Motion-Capture-System ihre tatsächlichen Positionen mit submillimeterpräziser Genauigkeit verfolgte. Die SPAD-Kamera ist die herausragende Technologie: Statt Licht als glatten Intensitätswert zu messen, meldet jedes Pixel, ob es einzelne Photonen detektiert hat—mit extrem hoher Geschwindigkeit und Sensitivität. Durch das Kombinieren vieler dieser ultrakurzen binären Aufnahmen kann das System Bilder rekonstruieren, die Details selbst in sehr schwach beleuchteten oder extrem kontrastreichen Szenen erhalten, in denen herkömmliche Kameras zu verschwimmen oder zu überbelichten neigen.
Lunarähnliche Fahrten in vielen Varianten aufnehmen
Um Forschenden ein reichhaltiges Testfeld zu bieten, entwarfen die Autoren sieben Arten von Roverpfaden, von langen Stop‑and‑Go‑Strecken, die vorsichtiges planetares Fahren imitieren, bis zu kurzen, kontinuierlichen Fahrten in verschiedenen Richtungen relativ zur künstlichen Sonne (auf sie zu, von ihr weg und seitwärts) sowie engen Drehungen auf der Stelle. Sie wiederholten diese Routen mit langsamen Gehgeschwindigkeiten und zehnmal schnelleren Fahrten, unter mehreren Beleuchtungsbedingungen, manchmal mit eingeschaltetem Rover‑Scheinwerfer und manchmal ohne. Insgesamt enthält SPICE‑HL3 88 zeit-synchronisierte Sequenzen, fast 1,3 Millionen Bilder sowie passende Bewegungs- und Bodenwahrheitsdaten. Die Bilder reichen von statischen Szenen, die sich für sorgfältige Analysen eignen, bis zu schnellen Sequenzen, die Bewegungsunschärfe und Belichtungskontrolle strapazieren. Alles ist in einer klar organisierten Dateistruktur gebündelt, mit Kalibrierdateien, die genau beschreiben, wie jede Kamera und jeder Sensor ausgerichtet ist und wie ihre Uhren zeitlich synchronisiert sind.
Einzelphotonen‑Vision auf die Probe stellen
Über die bloße Veröffentlichung der Daten hinaus prüfte das Team die Qualität und Nützlichkeit der aufgezeichneten Bilder. Sie verglichen, wie die SPAD-, die Monochrom- und die Stereo-Kamera mit einigen der schwierigsten visuellen Situationen umgingen: Dämmerungs‑ und Nachtfahrten sowie Fahrten, bei denen der Rover direkt in Richtung der „Sonne“ fuhr. Mithilfe einfacher Bildqualitätsmetriken und visueller Inspektion stellten sie fest, dass die Einzelphotonenkamera konsequent Strukturen in hellen wie schattigen Bereichen bewahrte, einen großen Helligkeitsumfang beibehielt und unter verschiedenen Bedingungen stabil blieb. Konventionelle Kameras lieferten gute Ergebnisse bei guten Lichtverhältnissen, verloren jedoch entweder Details in sehr dunklen Bereichen oder überbelichteten helle Regionen nahe der Lichtquelle. Die Autoren verifizierten auch, dass gängige Mapping‑ und Lokalisierungssoftware den Datensatz erfolgreich verarbeiten konnte, und bestätigten damit, dass Zeitstempel, Kalibrierungen und Formate robust genug für echte Robotikforschung sind. 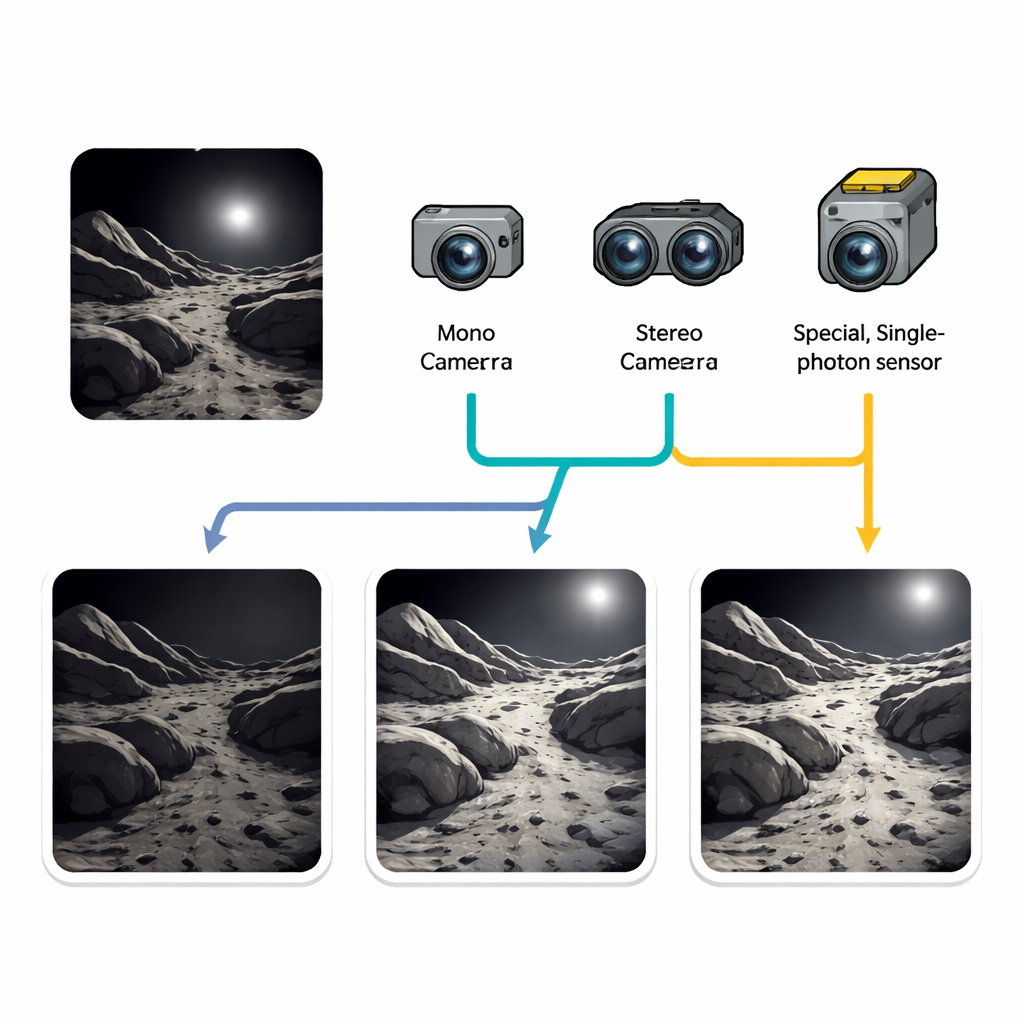
Grenzen, Vorbehalte und warum das wichtig ist
Obwohl LunaLab die winzigen Staubpartikel und subtilen Lichtstreueffekte echten Mondbodens nicht perfekt reproduzieren kann und ein unbeabsichtigtes Infrarotleuchten des Motion‑Capture‑Systems in die dunkelsten Szenen eingedrungen ist, argumentieren die Autoren, dass SPICE‑HL3 dennoch eine anspruchsvolle „Worst‑Case“-optische Umgebung für Rover‑Vision darstellt. Für Ingenieurinnen und Ingenieure sowie Wissenschaftlerinnen und Wissenschaftler, die Missionen zu den Mondpolen vorbereiten—oder Roboter für jede dunkle, kontrastreiche Umgebung entwerfen—bietet der Datensatz einen seltenen, öffentlich verfügbaren Benchmark. Er ermöglicht einen fairen Vergleich neuer Kameratechnologien wie SPAD‑Sensoren mit traditionellen Systemen, die Verbesserung von Navigations‑ und Mapping‑Algorithmen und trägt letztlich dazu bei, dass künftige Rover sicher durch die wechselnden Schatten des Mondes fahren und nicht im Dunkel liegen bleiben.
Zitation: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
Schlüsselwörter: Mondrobotik, planetare Navigation, Einzelphotonen-Bildgebung, Robotik-Bilddatensätze, extremes Licht