Clear Sky Science · de
Skalierbare In-situ-Fertigung multimodaler elektronischer Haut für intelligente Robotik und interaktive Systeme
Robotern und Spielzeugen einen Tastsinn geben
Stellen Sie sich einen Roboter vor, der eine Scheibe heißen Toasts behutsam aufheben kann, ohne sie zu zerdrücken oder Ihre Hand zu verbrennen, oder ein Spielzeug, das unterschiedlich reagiert, wenn Sie es umarmen, seine Ohren biegen oder es mit Ihrer Hand erwärmen. Diese Forschung beschreibt eine neue Art von „elektronischer Haut“, die solche Möglichkeiten greifbarer macht, indem sie Maschinen ein reichhaltigeres, menschenähnlicheres Gefühl für Berührung und nahes Umfeld verleiht.
Warum Maschinen besseren Tastsinn brauchen
Die heutigen Roboter und Geräte sind im Umgang mit der realen Welt oft noch unbeholfen. Viele können nur eine einzige Größe wahrnehmen, etwa Druck, und beruhen häufig auf sperrigen, manuell zusammengebauten Bauteilen, die sich nur schwer skalieren lassen. Die menschliche Haut hingegen vereint ständig viele Signale: sanfte Berührung, fester Druck, Dehnung, Wärme und sogar eine Wahrnehmung, wie nahe Objekte sind, bevor sie Kontakt machen. Die Autorinnen und Autoren dieser Studie wollten eine elektronische Version der Haut entwickeln, die mehrere dieser Empfindungen gleichzeitig erfassen kann, dabei dünn, flexibel und leicht an verschiedene Aufgaben anpassbar ist.
Aufbau eines dünnen, flexiblen Tastsinns
Das Team entwickelte eine flache „E-Haut“ mit einem reinraumfreien Verfahren, das skalierbar und schnell anpassbar ist. Im Kern liegt eine flexible Kupferschaltung, die mit einem UV-Laser strukturiert wird und wie die Leiterbahnen einer Leiterplatte funktioniert, dabei aber biegbar ist und sich um Kurven legt. Ober- und unterhalb dieser Schaltung befindet sich eine weiche Silikonschicht, durchsetzt mit winzigen Luftporen, ähnlich einem Schwamm. Die äußeren Oberflächen sind mit einer dünnen Schicht aus Kohlenstoffnanoröhren beschichtet, die eine leitfähige Hülle bildet, die das Bauteil gegen elektrische Störungen schützt und gleichzeitig als gemeinsame Referenzschicht für die Messungen dient. Dieser Aufbau lässt jedes Sensorelement wie einen kleinen elektrischen Kondensator wirken, dessen Wert sich ändert, wenn das Material gedrückt, gebogen, erwärmt oder einem Objekt genähert wird. Zusätzliche kleine Chips, die auf derselben flexiblen Schaltung montiert sind, messen Temperatur und Abstand berührungslos, sodass das gesamte Blatt nicht nur Druck- und Dehnungsrezeptoren der Haut imitiert, sondern auch Wärme und „Nahsicht“. 
Wie die Sensoren Druck und Bewegung wahrnehmen
Die Druck- und Biegekomponenten der E-Haut sind so ausgelegt, dass sie stark auf kleine Änderungen reagieren und zugleich langlebig bleiben. Wenn etwas drückt, komprimieren sich die Poren in der weichen Schicht, wodurch die inneren Metalllagen näher zusammenrücken und Luft durch mehr Silikon ersetzt wird. Beide Effekte erhöhen das elektrische Signal, besonders bei niedrigen Drücken, wo das Material am leichtesten verformbar ist. Tests zeigten, dass die E-Haut sehr sanfte Berührungen bis in einige Dutzend Pascal hinein erkennen kann, mit schneller Reaktion und geringem Drift auch nach zehntausend Druck-Zyklus. Beim Biegen schlägt die Schicht um die inneren Leiterbahnen um, wodurch auf einer Seite wieder der Abstand zwischen den Lagen schrumpft und das Signal ansteigt. Die Antwort steigt bei größeren Biegewinkeln deutlicher, was dem realen Verhalten entspricht, dass Biegungen eher lokalisiert auftreten statt sich gleichmäßig zu verteilen. Insgesamt balanciert das Design Weichheit, Stabilität und Sensitivität aus, ohne die komplexen geschichteten Strukturen vieler früherer Geräte zu benötigen. 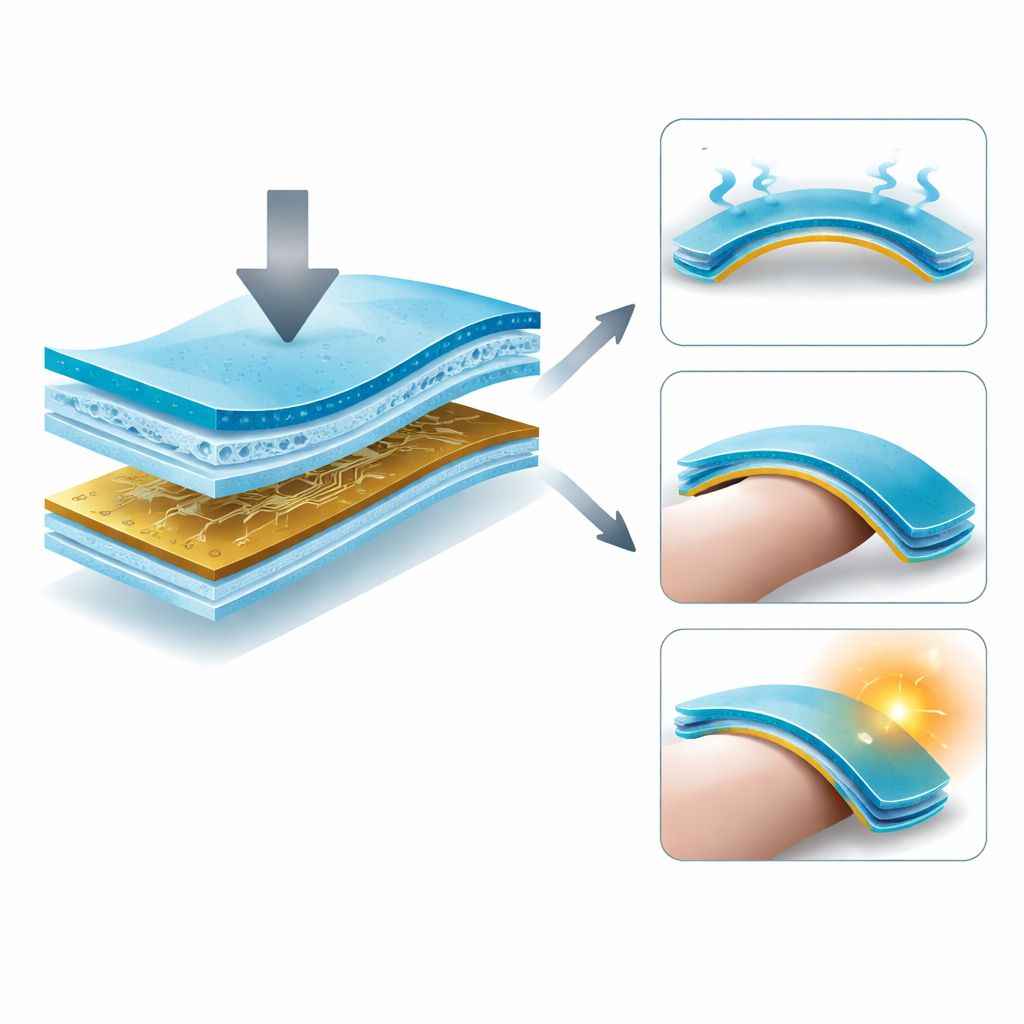
Von Küchenrobotern bis zu verspielten Begleitern
Um die Fähigkeiten der E-Haut zu demonstrieren, wickelten die Forschenden sie um einen Robotergriff und gaben dem Roboter eine auf das Kochen bezogene Aufgabe. Während sich der Greifer einem heißen Stück Brot nähert, kartiert ein winziges, in die Haut eingebettetes Tiefensensormodul zunächst die Entfernung zum Objekt und hilft dem Roboter, seine Finger vor dem Kontakt auszurichten. Nach dem Kontakt steuern Druck- und Biegesensoren, wie fest er zudrücken darf, um ein Verrutschen oder Zerdrücken des Brots zu vermeiden. Ein Temperatursensor auf demselben Blatt prüft, wann das Brot genug abgekühlt ist, um es sicher an eine Person weiterzugeben. In einem weiteren Beispiel bauten die Forscher ein weiches Elefantenspielzeug mit E-Haut. Das Drücken seiner Brust verändert den Rhythmus eines verborgenen Vibrationsmotors, sodass es sich wie ein Herzschlag anfühlt; das Biegen eines Ohrs löst Töne aus, und die Wärme einer Hand kann die Wangen des Spielzeugs aufleuchten lassen und Berührung in eine verspielte, emotionale Interaktion verwandeln.
Muster von Druck über eine Fläche erkennen
Über einzelne Punkte hinaus kann dieselbe Fertigungsmethode große Druckmessfelder erzeugen, die ablesen, wo und mit welcher Intensität eine Fläche berührt wird. Das Team zeigte ein 8-mal-15-Gitter, das wie eine Druckkamera funktioniert: Wenn Finger, Gewichte oder geprägte Formen drücken, rekonstruiert das System das Kraftmuster und erkennt sogar Umrisse wie Buchstaben. Diese Fähigkeit, Druckkarten und Schwerpunkte zu erfassen, könnte Robotern beim Ausbalancieren von Lasten helfen, Objekte erkennen oder als intelligente Waagenplattformen und interaktive Oberflächen dienen. Da das zugrunde liegende Verfahren schnell und modular ist, können Designer Größe, Abstand und Weichheit der Sensel für verschiedene Anwendungen anpassen, von smarten Möbeln bis zu Matten zur Haltungsüberwachung.
Was das für Alltagstechnik bedeutet
Indem mehrere Messmodi—Druck, Biegung, Wärme und Nähe—in einem einzigen, dünnen und leicht anpassbaren Blatt kombiniert werden, bringt diese Arbeit elektronische Haut deutlich näher an die feinen Fähigkeiten menschlicher Haut. Zwar gibt es noch Raum für Verbesserungen bei sehr hohen Drücken und zur Automatisierung einiger Montageschritte, doch zeigt der Ansatz bereits, dass reichhaltiger Tastsinn Robotern, Spielzeugen und anderen Geräten hinzugefügt werden kann, ohne schwere, manuell gefertigte Hardware. Praktisch könnte das zu Haushaltsrobotern führen, die zerbrechliche Gegenstände sicherer handhaben, zu medizinischen Wearables, die Körperkontakt komfortabler nachverfolgen, und zu interaktiven Produkten, die auf unsere Berührungen deutlich natürlicher reagieren.
Zitation: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Schlüsselwörter: elektronische Haut, taktiles Fühlen, flexible Sensoren, Robotergreifer, interaktive Geräte