Clear Sky Science · de
Biomimetischer Aktuator aus einem Relaxor-Ferroelectric-Polymer-Nanokomposit
Winzige Roboter, die sich wie echte Insekten bewegen
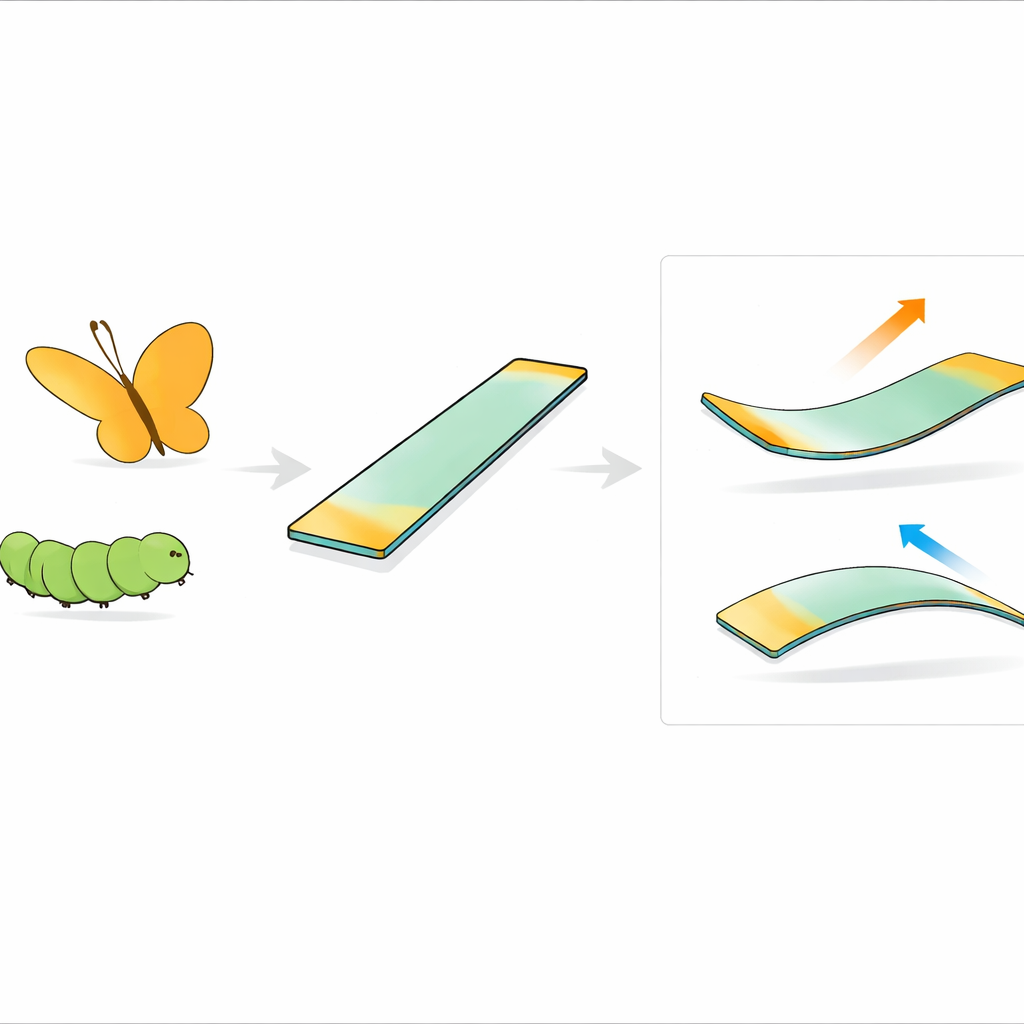
Stellen Sie sich einen Roboter in Raupengröße vor, der über unebenes Gelände kriechen kann, oder ein schmetterlingsähnliches Gerät, das mit seinen Flügeln schlägt und abhebt – und das alles besteht aus einem einzigen, papierdünnen Kunststoffstück und benötigt weniger Energie als eine LED-Nachtlampe. Dieser Artikel beschreibt eine neue Art von weichem Material, das wie künstliche Muskulatur wirken kann und solche Roboter in Insektengröße einfacher, leichter und energieeffizienter macht als bisher.
Warum kleine, weiche Maschinen wichtig sind
Miniaturroboter, die von Insekten inspiriert sind, könnten in eingestürzte Gebäude kriechen, um nach Überlebenden zu suchen, durch Rohre schlängeln, um Infrastruktur zu inspizieren, oder leise Felder und Wälder überwachen. Um in diesen engen und unvorhersehbaren Räumen zu funktionieren, müssen sie winzig, flexibel und robust sein und dabei sehr wenig Energie verbrauchen. Viele aktuelle Entwürfe beruhen auf komplizierten Baugruppen aus Zahnrädern, Scharnieren und mehreren Materialien, die Gewicht hinzufügen, Energie verschwenden und schwer weiter zu verkleinern sind. Die Autoren argumentieren, dass die ideale Lösung ein einziges Material ist, das sowohl Bewegung erzeugen als auch direkt übertragen kann, ähnlich wie echte Muskeln in Tieren.
Ein intelligenter Kunststoff, von innen heraus gestaltet
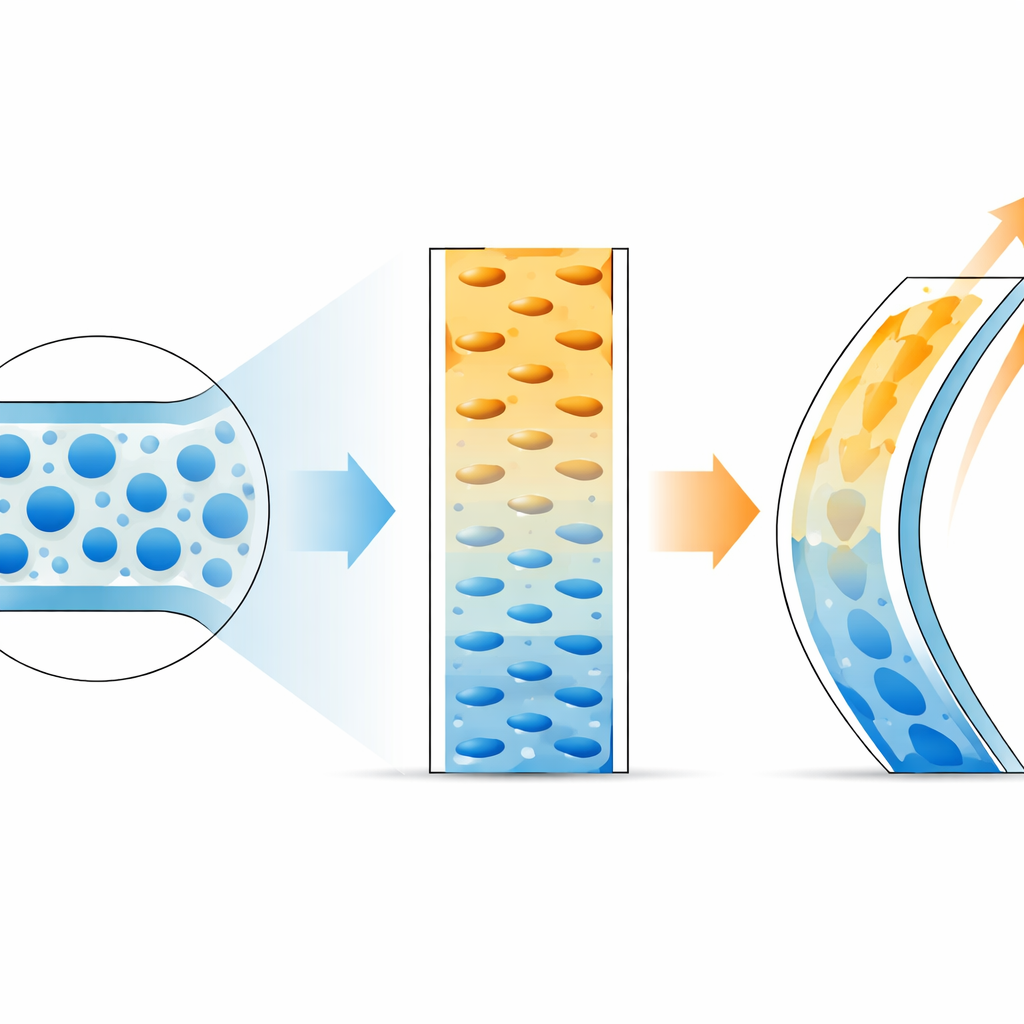
Im Zentrum dieser Arbeit steht ein dünner Kunststofffilm auf Basis einer bekannten Materialfamilie namens PVDF, die bereits wegen ihrer Fähigkeit geschätzt wird, sich unter einem elektrischen Feld zu verformen. Die Forschenden mischen diesen Kunststoff mit winzigen „Polymerpunkten“, Nanopartikeln, die mit chemischen Gruppen bedeckt sind, die Wasserstoffbrücken bilden können. Wenn die Mischung zu einem Film gegossen und kontrolliert erwärmt wird, verdampft das Lösungsmittel oben schneller als unten. Dieses ungleichmäßige Trocknen zusammen mit den Wasserstoffbrücken fördert das Ausrichten der Kunststoffketten nahe der Unterseite in einer stark geordneten, polaren Anordnung, während die Oberseite weniger geordnet bleibt. Das Ergebnis ist ein eingebauter innerer Gradient durch die Dicke einer einzelnen Schicht.
Von verborgener Struktur zu kraftvoller Bewegung
Dieser subtile Strukturgradient hat eine große mechanische Wirkung. Wenn ein elektrisches Feld über den Film angelegt wird, reagiert die stärker geordnete, hochpolare untere Region stärker als die obere, sodass sich eine Seite des Blatts mehr ausdehnt als die andere. Dieses Ungleichgewicht lässt den ganzen Streifen sich biegen, ähnlich einem klassischen Bimetallstreifen in einem Thermostat, jedoch hier in einem vollständig organischen, flexiblen Film von nur einigen zehn Mikrometern Dicke. Sorgfältige Messungen zeigen, dass der Film seine Länge um bis zu etwa 14 Prozent ändern kann und mechanische Energiedichten erreicht, die an die von harten Keramikaktuatoren heranreichen – dabei bleibt er weich und leicht. Im Vergleich zu einem ansonsten identischen Film ohne Polymerpunkte oder Gradientenverarbeitung erzeugt das neue Material mehrere Male mehr Dehnung und wandelt elektrische Energie deutlich effizienter in Bewegung um.
Eine kriechende Raupe und ein fliegender Schmetterling
Um zu demonstrieren, was dieses Material praktisch leisten kann, schneidet das Team den Film in insektenähnliche Formen und fügt einfache kohlenstoffbasierte Elektroden und dünne Kupferträger hinzu. Ein Entwurf ähnelt einer kleinen Raupe mit breiter Mitte und verjüngten Enden; wenn ein wechselndes elektrisches Feld angelegt wird, biegt sich der Streifen in einem rhythmischen Muster und kriecht entlang einer gerillten Spur mit Geschwindigkeiten von mehreren Körperlängen pro Sekunde und verbraucht dabei nur wenige Milliwatt Leistung. Ein zweites Design ahmt einen Schmetterling nach, mit einer aktiven Zentralzone und flexiblen Flügeln. Angetrieben von ähnlichen elektrischen Signalen schlagen die Flügel schnell und können das Gerät einige Millimeter von einer Plattform abheben, sogar mit Lasten bis zu zwanzigmal seines eigenen Gewichts – alles bei einer Gesamtmasse des Aktuators von ungefähr 50 Milligramm.
Was das für zukünftige winzige Roboter bedeutet
Diese Studie zeigt, dass es durch gezielte Gestaltung der inneren Organisation eines Kunststoffmaterials von einer Seite zur anderen möglich ist, ein einzelnes, ultradünnes Blatt zu erzeugen, das sich unter einem elektrischen Feld stark biegt und komplexe, lebensechte Bewegungen antreiben kann. Obwohl die aktuellen Geräte noch relativ hohe Spannungen erfordern, machen ihr extrem niedriger Energieverbrauch und ihre federleichte Bauweise sie zu vielversprechenden Bausteinen für zukünftige Roboter in Insektengröße und intelligente Geräte. Mit weiteren Verfeinerungen zur Senkung der Betriebsspannung könnten ähnliche Filme eines Tages Flotten winziger, autonomer Maschinen ermöglichen, die kriechen, schlagen und mit künstlichen Muskeln, nur haarfein dick, die Welt erkunden.
Zitation: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
Schlüsselwörter: weiche Robotik, künstliche Muskeln, Polymeraktuatoren, Roboter in Insektengröße, elektroaktive Materialien