Clear Sky Science · de
Entschlüsselung von Phantomgliedbewegungen aus intraneuralen Aufzeichnungen
Neue Wege, sich mit einem fehlenden Bein zu bewegen
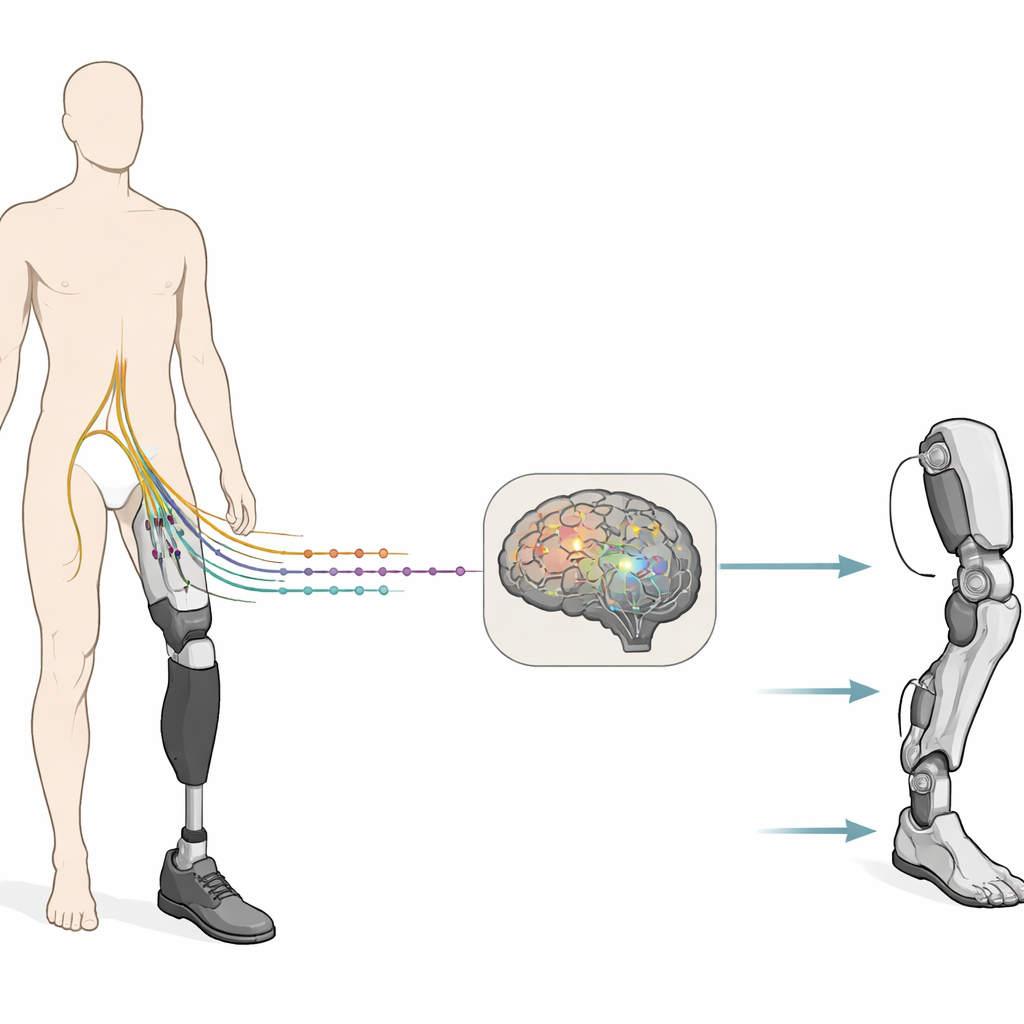
Für Menschen, denen oberhalb des Knies ein Bein fehlt, fühlt sich das Gehen mit einer Prothese oft eher an wie das Steuern einer starren Maschine als wie die Bewegung eines eigenen Körperteils. Diese Studie verfolgt einen anderen Ansatz: die verbliebenen Bein-Nerven direkt abzuhören, wenn Amputierte versuchen, ihr „Phantom“-Bein zu bewegen, und diese Signale zu nutzen, um eine künftige bionische Gliedmaße zu steuern. Indem sie an dieselbe Verdrahtung anknüpfen, die das Gehirn früher zum Bewegen von Knie, Sprunggelenk und Zehen verwendete, zeigen die Forschenden, dass eine natürliche, intuitive Steuerung eines künstlichen Beins in Reichweite liegen könnte.
Den Nerven innerhalb des Oberschenkels zuhören
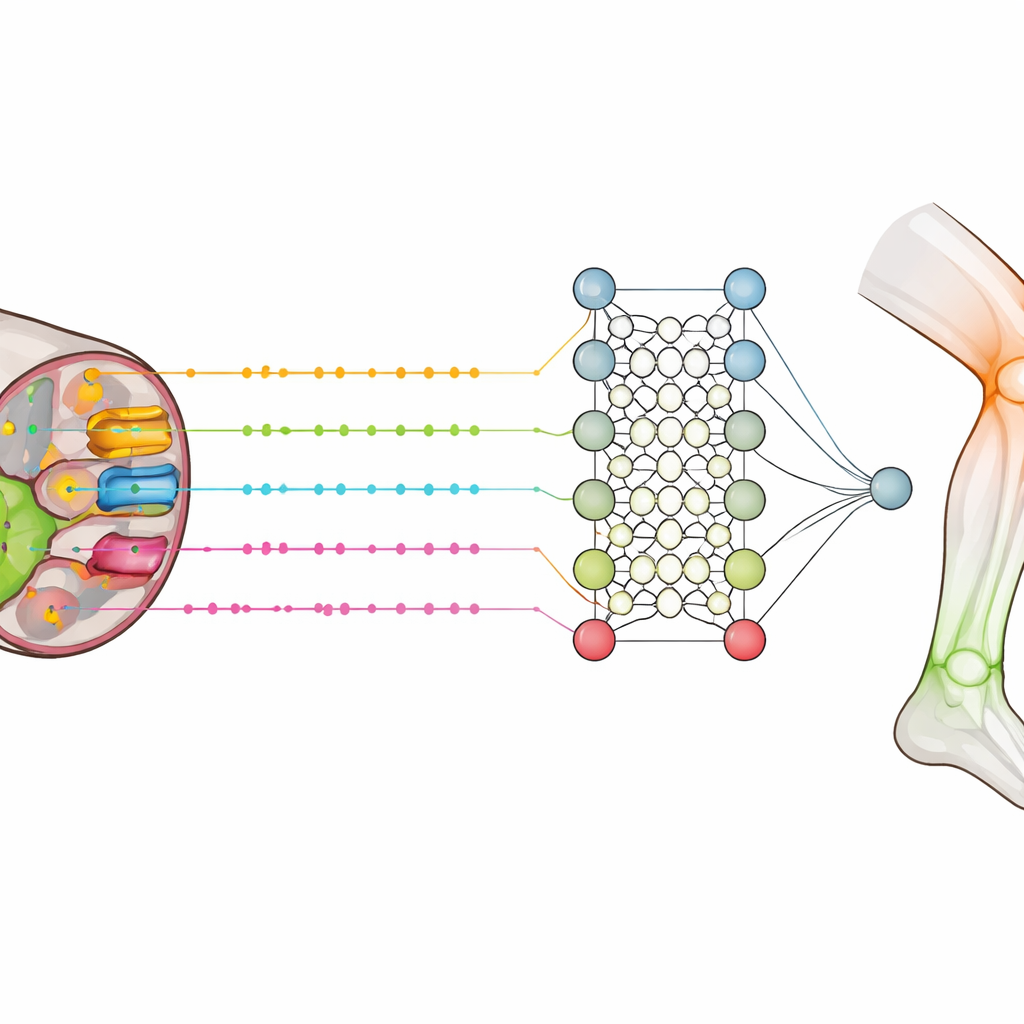
Das Team arbeitete mit zwei Freiwilligen, denen oberhalb des Knies ein Bein fehlte, die aber ihr Phantomglied noch lebhaft spürten und „bewegen“ konnten. Chirurgen implantierten vier haarfeine Elektrodenstreifen in einen Ast des Ischiasnervs an der Rückseite des Oberschenkels. Jeder Streifen trug mehrere winzige Aufzeichnungsstellen, insgesamt 56 Kanäle. Als die Teilnehmenden im Sitzen aufgefordert wurden, ihr phantastisches Knie, Sprunggelenk oder die Zehen zu beugen und zu strecken, zeichnete die Elektrode Ausbrüche elektrischer Aktivität von Nervenfasern auf, die einst die nun nach der Amputation fehlenden Muskeln steuerten.
Geisterbewegungen hinterlassen echte elektrische Spuren
Obwohl der Unterteil des Beins fehlte, erzeugten Versuche, ihn zu bewegen, klare und strukturierte Signale im Nerv. Die meisten Aufzeichnungsstellen reagierten auf mindestens eine Bewegungsart, und viele unterschieden zwischen Beugung und Streckung. Einige Elektroden waren stärker auf Kniebewegungen abgestimmt, andere auf Sprunggelenk oder Zehen, was widerspiegelt, wie unterschiedliche Muskelgruppen an den Nerv angeschlossen sind. Stärke und Timing der Nervenfeuermuster unterschieden sich von Gelenk zu Gelenk, was darauf hindeutet, dass die ursprüngliche „Karte“ der Beinsteuerung im verbleibenden Nervenstumpf erhalten bleibt. Die Forschenden stellten außerdem fest, dass diese motorischen Muster gut mit der bekannten Anatomie übereinstimmen: Nervenkanäle, die bei einer bestimmten Bewegung aktiv wurden, passten tendenziell zu den Muskeln, die diese Bewegung normalerweise erzeugen würden.
Ein gehirnähnlicher Dekodierer wird trainiert
Die Erfassung von Nervenaktivität ist nur die halbe Miete; eine zukünftige Prothese muss diese komplexen Signale schnell in Befehle umwandeln. Die Wissenschaftler wandten sich einem spikenden neuronalen Netzwerk zu, einer Art künstlichen Netzwerks, das mit kurzen elektrischen Impulsen kommuniziert, ähnlich wie echte Neuronen. Zuerst transformierten sie die Rohaufzeichnungen in dichte Spike-Züge, die betonten, wie sich die Signalstärke über die Zeit änderte. Diese Spike-Züge wurden dann einem kompakten Dekodierer zugeführt, der lernte, sie in Bewegungs„klassen“ wie Sprunggelenksbeugung oder Knieextension einzusortieren. Im Vergleich zu Standard-Methoden des maschinellen Lernens war der spikende Dekodierer sowohl genauer als auch effizienter und erkannte zuverlässig mehrere intendierte Bewegungen aus kurzen Auszügen der Nervenaktivität.
Kombination von Nerven- und Muskelsignalen
Da die Elektroden zwischen Oberschenkelmuskeln lagen, erfassten sie auch kleine Muskelsignale in einem niedrigeren Frequenzbereich. Durch Filterung der Aufzeichnungen konnte das Team muskelähnliche Aktivität von den schnelleren Nervenspikes trennen. Wenn sie ihren Dekodierer nur mit Muskelsignalen trainierten, verbesserte sich die Leistung im Vergleich zur ausschließlichen Nutzung hochfrequenter Nervendaten. Am besten war jedoch die Kombination beider Quellen – Nerv und Restmuskulatur –, die die Genauigkeit noch weiter steigerte, insbesondere bei Knie- und Sprunggelenksaktionen. Das legt nahe, dass eine einzelne implantierte Technologie sowohl Nervenverkehr als auch verbliebene Muskelaktivität anzapfen könnte, um ein reichhaltigeres, stabileres Steuersignal für ein robotisches Bein zu liefern.
Den Boden spüren, während man das Bein bewegt
Die gleichen intraneuralen Elektroden, die ausgehende Bewegungsbefehle abhörten, konnten auch in umgekehrter Richtung verwendet werden: um kleine elektrische Impulse zurück in den Nerv zu senden und Empfindungen hervorzurufen. In früheren Arbeiten mit diesen Teilnehmenden erzeugte Stimulation über diese Implantate Berührungsgefühle an der Fußsohle und den Zehen. In der vorliegenden Studie kartierten die Forschenden, wo sich motorbezogene Aufzeichnungen und berührungsbezogene Empfindungen überschneiden. Sie fanden heraus, dass sich Nervenfasern für Bewegung und Empfindung auf Oberschenkelebene weitgehend getrennt befinden, was Designerinnen und Designern helfen könnte, einige Kontakte hauptsächlich für die motorische Dekodierung und andere hauptsächlich für sensorisches Feedback zuzuweisen und so Störungen zwischen beidem zu reduzieren.
Was das für künftige bionische Beine bedeutet
Für eine nicht fachkundige Leserschaft lautet die Kernbotschaft, dass die „Kabel“ zum Bewegen eines fehlenden Beins auch Jahre nach einer Amputation noch aktiv und auslesbar sind. Durch das Einbringen feiner Elektroden in den verbleibenden Nerv und das Verwenden gehirnähnlicher Algorithmen zur Interpretation der Signale ist es möglich, Moment für Moment zu erkennen, ob eine amputierte Person versucht, das Knie zu beugen, das Sprunggelenk zu bewegen oder die Zehen eines Phantomglieds zu krümmen. In Kombination mit elektrischer Stimulation, die das Gefühl von Berührung aus dem fehlenden Fuß wiederherstellt, könnte dieser Ansatz Prothesenbeine ermöglichen, die sich und bewegen sich sehr viel natürlicher anfühlen. Obwohl die Arbeit noch in einem frühen Laborstadium ist und offline nur an zwei Personen getestet wurde, legt sie wichtige Grundlagen für künftige Prothesen, die direkt an das Nervensystem anschließen und intuitivere Steuerung, besseren Gleichgewichtssinn und ein stärkeres Gefühl der Verkörperung bieten könnten.
Zitation: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
Schlüsselwörter: Phantomglied, Neuroprothetik, periphere Nerven-Schnittstelle, spikende neuronale Netze, Beinamputation