Clear Sky Science · de
Handähnlicher autonom fliegender Roboter zum Greifen und Interagieren in der Luft
Fliegende Helfer, denen man fast die Hand schütteln könnte
Stellen Sie sich einen kleinen fliegenden Roboter vor, der nicht nur seine Umgebung filmt, sondern auch eine Tür öffnen, Ihnen ein Getränk reichen oder ein Paket aus einem schwer zugänglichen Regal ziehen kann. Diese Studie stellt genau ein solches Gerät vor: eine kompakte Drohne, deren Körper zugleich als Hand fungiert. Indem die Forschenden Ideen von Vogeltrieb und menschlichem Greifen verbinden, zeigen sie, wie Luftroboter über passives Beobachten hinaus zu aktiven Helfern in Wohnungen, Fabriken und bei Such‑und‑Rettungseinsätzen werden könnten.
Von fliegenden Kameras zu fliegenden Händen
Die meisten heutigen Drohnen sind „fliegende Augen“, die für Fotografie, Kartierung oder Inspektion eingesetzt werden. Wenn Ingenieurinnen und Ingenieure versuchen, Roboterarme anzubauen, damit Drohnen Dinge greifen oder drücken können, werden die Maschinen schnell sperrig, schwer, energiehungrig und schwer zu steuern – besonders drinnen oder in der Nähe von Menschen. Die Autorinnen und Autoren gehen dieses Problem an, indem sie den Drohnenkörper selbst neu denken. Statt einen separaten Arm anzuschrauben, gestalten sie den gesamten Rahmen so, dass er wie eine Hand funktioniert: er kann Objekte umfassen, sich an Pfosten oder Bäumen festklammern und trotzdem wendig durch enge Räume fliegen.
Ein handförmiger Flugkörper
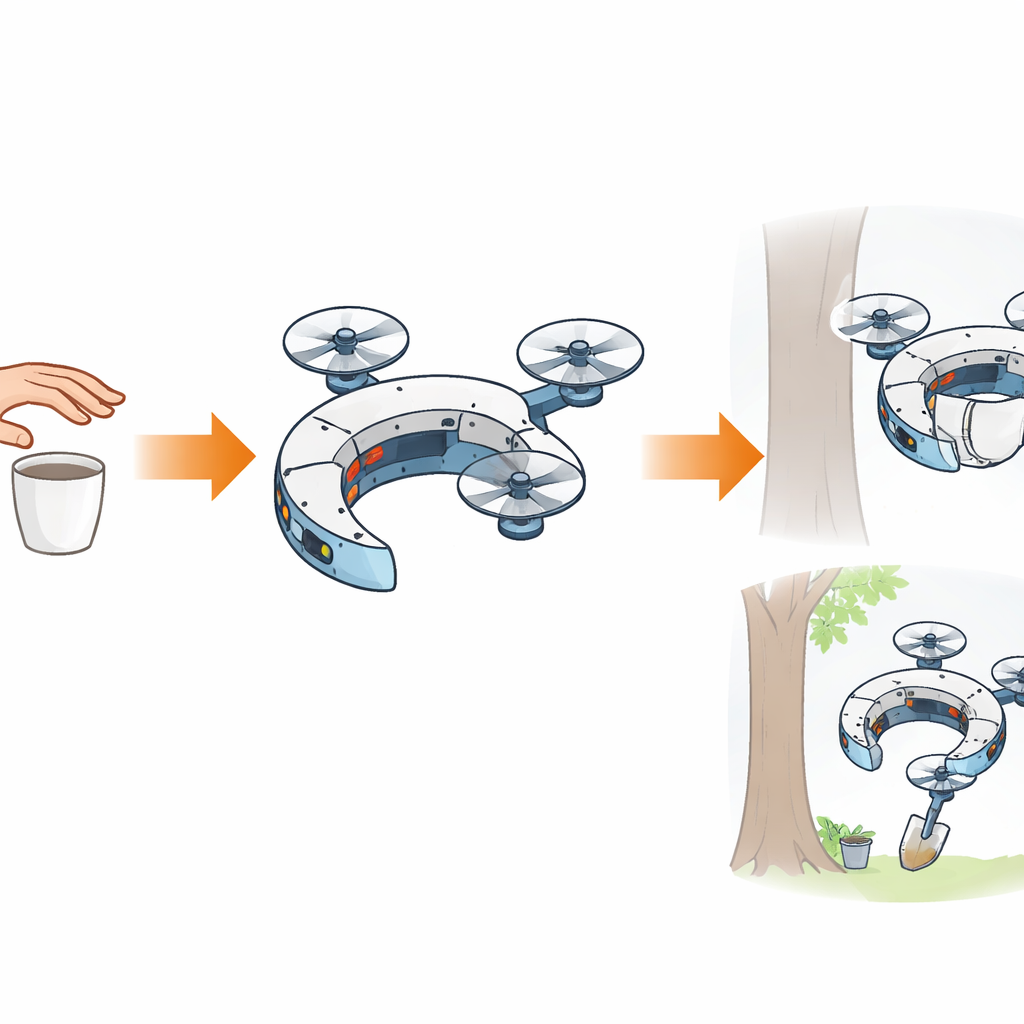
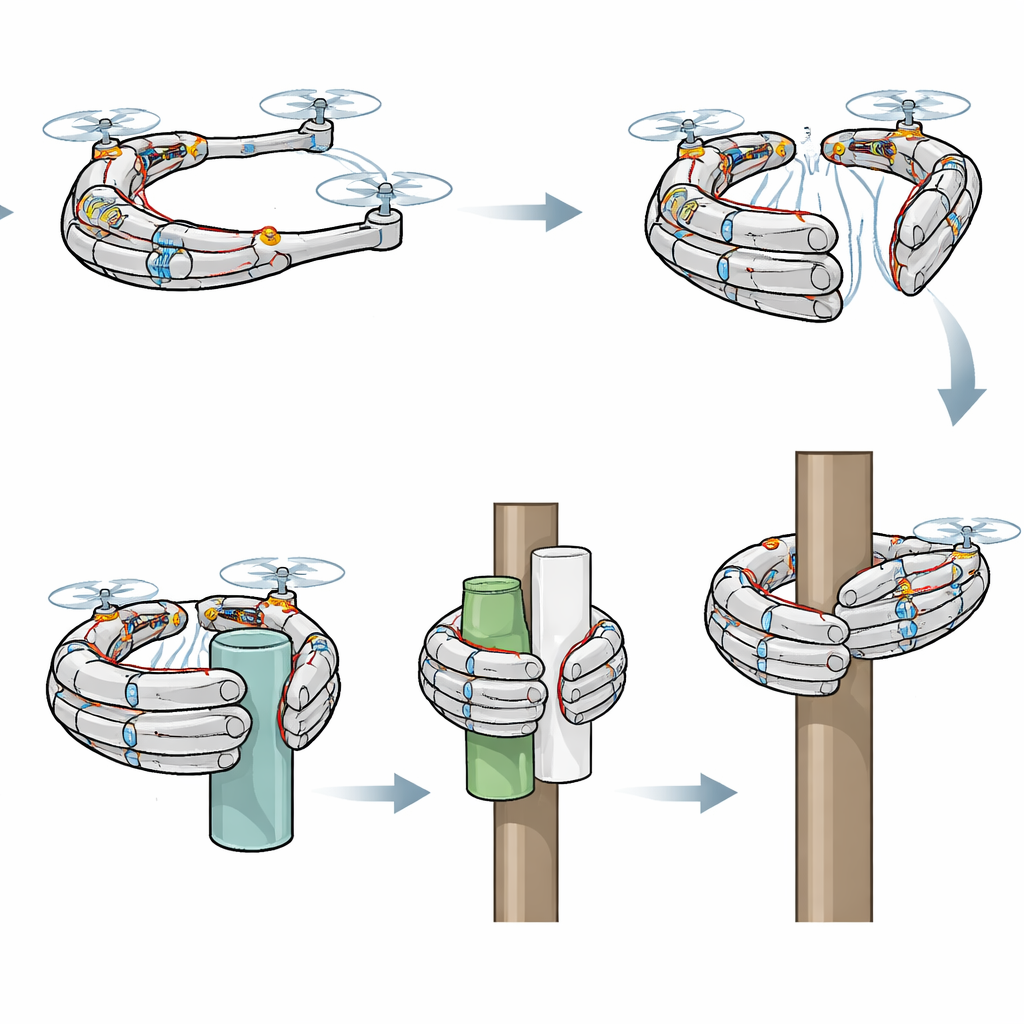
Der neue Roboter, HI‑ARM genannt, hat in Größe und Gewicht etwa die Dimension einer menschlichen Hand. Sein Rahmen bildet eine offene C‑Form, die einer gekrümmten Handfläche mit Fingern ähnelt. Innerhalb dieses Rings befinden sich teleskopierbare Segmente und verdrehbare Gelenke, die nicht von vielen Motoren, sondern von einem einzigen sehnigen Zugseil bewegt werden, das von einem Servo gezogen wird. Federn ermöglichen es der Struktur, sich zu biegen und dann in ihre ursprüngliche Form zurückzuschnellen, wodurch Energie gespeichert und wieder freigegeben wird – ähnlich wie Muskeln und Sehnen. Dieses unteraktuisierte Design erlaubt dem Roboter, sich um unbekannte Objekte anzupassen: Wenn das Seil straffer gezogen wird, komprimieren und verdrehen sich unterschiedliche Teile, bis sie sich natürlich an das Gegriffene anpassen.
Wie der Roboter „denkt" und fliegt
Um diesen formwandelnden Körper nutzbar zu machen, entwickelt das Team ein geschichtetes „Gehirn“ für den Roboter. Ein Teil plant, wohin die Drohne fliegen und wann sie greifen, loslassen oder sich festsetzen soll, und greift auf eine Bibliothek grundlegender Aktionen wie „greifen“, „loslassen“ oder „an Pfosten festsetzen“ zurück. Ein anderer Teil übersetzt diese Pläne in glatte Raumtrajektorien, denen die Drohne in Echtzeit folgen kann. Ein schneller Regelkreis schätzt ständig die Position des Roboters, die sich verschiebende Lage seines Schwerpunkts beim Verformen und die zusätzlichen Kräfte, wenn er Objekte aufnimmt oder gegen sie drückt. Adaptive Algorithmen erkennen diese Störungen und verstärken oder balancieren automatisch den Schub der vier Propeller, sodass der Flug stabil bleibt, selbst während der Körper eine Flasche zusammendrückt oder eine Tür aufstößt.
Was diese fliegende Hand leisten kann
In Innentests führt HI‑ARM vertraute, menschenähnliche Handlungen aus. Er nutzt seine „Handfläche“, um eine volle Wasserflasche zu greifen und auf einer präzisen Flugbahn zu transportieren, und seine „Fingertips“, um eine dünne Serviette zu kneifen und anzuheben – eine besonders delikate Aufgabe für eine Maschine. Dieselbe Mechanik passt sich Spielzeug, Schachteln, Taschen und unregelmäßig geformten Blöcken an, ohne deren Form im Voraus kennen zu müssen. Der Roboter kann an einen Baumstamm oder Pfosten heranfliegen, sich darum klemmen, seine Propeller abschalten und einfach dort hängen bleiben – mit deutlich weniger Energieverbrauch als beim schwebenden Flug. Er kann sich auch einer Tür nähern, um den Griff legen und die Tür aufschwingen, während er sich trotz der Rückstoßkräfte im Gleichgewicht hält.
Menschen helfen und draußen arbeiten
Die Forschenden untersuchen auch, wie ein solches Gerät mit Menschen interagieren könnte. In einer häuslichen Szene nimmt die Drohne ein Paket aus der Hand einer Person, räumt es weg, holt ein Getränk vom Tisch, reicht es, sammelt später die leere Flasche ein und setzt sich schließlich an einen Garderobenhaken, um auf die nächste Aufgabe zu warten – alles in einer durchgehenden, flüssigen Sequenz. Mit Videobrille und einem einfachen Einhand‑Controller steuert eine mobilitätseingeschränkte Person den Roboter aus der Ferne, sodass er draußen einen Kaffeebecher aufnimmt und über Distanzen von mehreren zehn Metern zurückbringt. In Feldversuchen setzt sich die Drohne auf Bambus und Pfosten, quetscht sich durch eine enge Felsöffnung, indem sie ihren Körper verkleinert, und transportiert ein Getränk über einen Fluss – Hinweise auf mögliche Anwendungen in Zustellung, Inspektion und Rettung.
Was das im Alltag bedeuten könnte
Die Arbeit zeigt, dass ein kleiner, handförmiger Flugroboter wendigen Flug mit überraschend menschenähnlichen Greif‑, Festsetz‑ und Interaktionsmöglichkeiten mit Gegenständen und Personen verbinden kann. Durch die enge Verzahnung von Körperdesign, Bewegungsplanung und adaptiver Regelung überwinden die Autorinnen und Autoren viele der Größen‑ und Stabilitätsprobleme, die frühere Luftmanipulatoren gebremst haben. Während künftige Versionen bessere onboard‑Vision und intelligentere Entscheidungsfindung benötigen werden, um vollständig autonom zu operieren, weist diese Studie in Richtung einer Zukunft, in der „fliegende Hände“ Pakete zustellen, Menschen mit Behinderungen assistieren, Infrastruktur warten und empfindliche Aufgaben an Orten ausführen könnten, die für Menschen schwer oder gefährlich zu erreichen sind.
Zitation: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
Schlüsselwörter: aeriale Manipulation, fliegende Roboterhand, Drohnen, Mensch‑Roboter‑Interaktion, biomimetische Robotik