Clear Sky Science · de
Robotisches Springen verbessert durch schubinduzierte Hypogravität — präzise, vorhersehbare und weite Sprünge
Roboter, die springen können, als wären sie auf dem Mond
Stellen Sie sich einen Rettungsroboter vor, der mühelos über Mauern springt, Bäche überspringt oder durch ein offenes Fenster taucht, ohne seinen Landepunkt um mehr als einen Zentimeter zu verfehlen. Dieses Paper beschreibt eine neue Art von Sprungmaschine, die genau das erreicht, indem sie sich kurzzeitig eine „geringere Schwerkraft“ verleiht — ähnlich wie auf dem Mond oder Pluto — und dabei ihre Sprünge präzise und vorhersehbar hält.
Warum springende Roboter heute Probleme haben
Tiere wie Laubheuschrecken oder Frösche können weite Sprünge ausführen, auf schmalen Landezonen landen und sich in der Luft an veränderte Bedingungen anpassen. Die meisten Roboter können das nicht. Traditionelle Sprungroboter stehen vor einem Kompromiss: Entweder sie springen sehr weit mithilfe starker Federn oder Motoren, oder sie landen präzise und sicher — beides zusammen gelingt selten. Federbeladene „Katapult“-Konzepte speichern viel Energie, laden aber langsam nach und sind in der Luft schwer zu kontrollieren. Direktmotorisch angetriebene Beine lassen sich leichter steuern, fehlen aber oft die Leistungsentladung für sehr hohe Sprünge. Zusätzliche Flügel oder Rotoren können die Flugzeit verlängern, machen die Flugbahn jedoch häufig unordentlich und unvorhersehbar — ein Problem, wenn ein kleiner Zielpunkt getroffen oder bewegenden Hindernissen ausgewichen werden muss.
Geringere Schwerkraft vortäuschen mit Luftschub
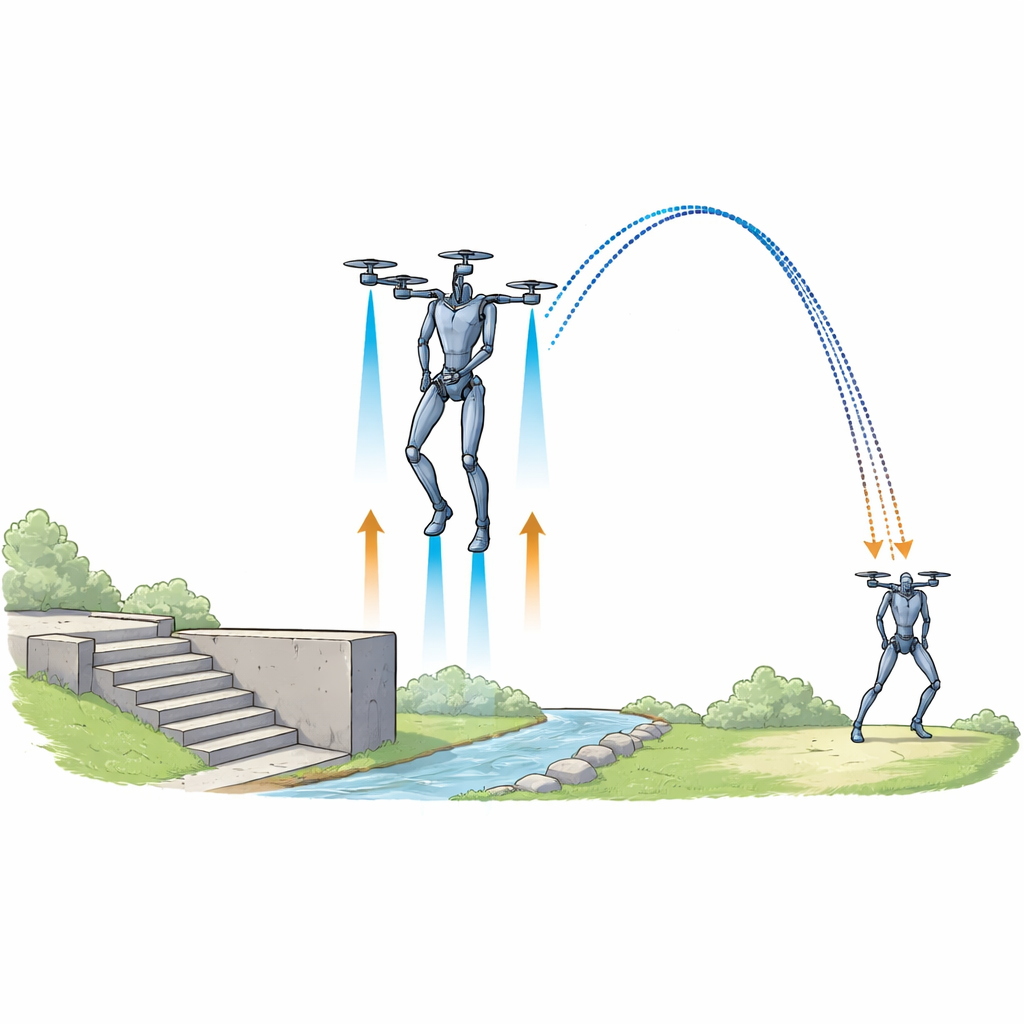
Die Forschenden bauten einen 370 Gramm schweren zweibeinigen Roboter namens GravOff, der diesen Kompromiss umgeht, indem er seine eigene Niedrigschwerkraft-Umgebung schafft. Der Roboter hat ein Paar langer, insektenähnlicher Beine, die direkt von Motoren angetrieben werden, sowie vier kleine Propeller an einem breiten Gestell. Beim Sprung geben die Beine einen schnellen Stoß vom Boden, um hohe Absprunggeschwindigkeit zu erreichen. Gleichzeitig drücken die Propeller gerade so viel nach oben, dass ein Teil der Erdanziehung aufgehoben wird — einen Zustand, den die Autorinnen und Autoren schubinduzierte Hypogravität nennen. Weil die „effektive Schwerkraft“ geringer ist, schickt dieselbe Beinleistung den Roboter auf eine deutlich höhere und längere Flugbahn — bis zu 6,9 Meter Höhe, etwa 46-mal seine Körperhöhe — vergleichbar mit den besten Rekordsprüngen, jedoch mit schonenderen Absprungs- und Landegeschwindigkeiten.
Die perfekte Flugbahn zeichnen und steuern
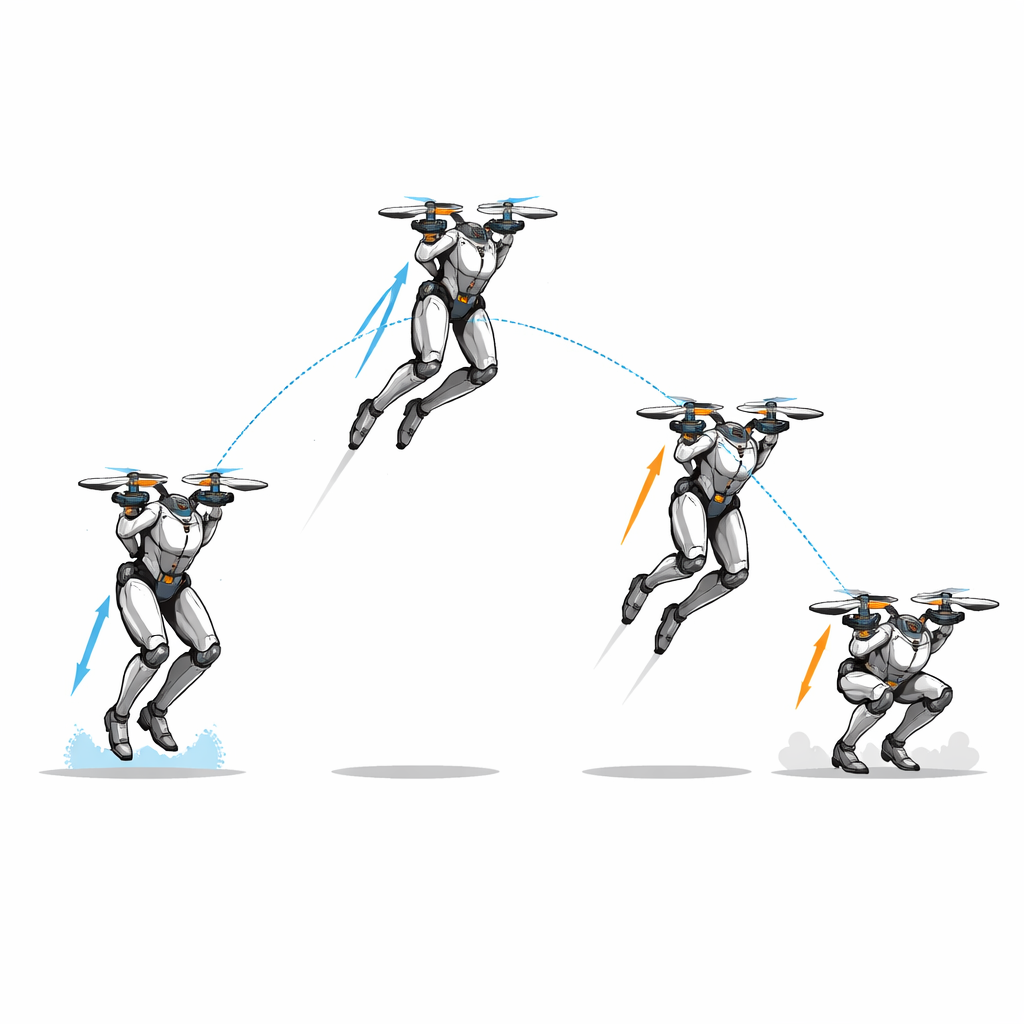
Was GravOff besonders ungewöhnlich macht, ist nicht nur die Weite der Sprünge, sondern die Präzision, mit der er einer vorgegebenen Bahn folgt. Das Team behandelt jeden Sprung als zeitlich abgestempelte Parabel, bei der Position und Zeit wie Punkte auf einer gezeichneten Kurve festgelegt sind. Mit Sensoren und einem prädiktiven Regelungsalgorithmus vergleicht der Roboter seine tatsächliche Flugbewegung Dutzende Male pro Sekunde mit dieser Referenzkurve und kippt die Rotoren leicht, um sich zurück auf Kurs zu schieben. Entscheidend ist, dass sich die Propeller unabhängig von der Kippung des Roboterkörpers schwenken lassen, sodass der Roboter seinen Schub ausrichten kann, ohne das gesamte Gestell neigen zu müssen — Gleichgewicht und Lenkung bleiben getrennt. Diese doppelte Steuerung erlaubt es GravOff, innerhalb eines Quadrats von nur 25 Zentimetern Kantenlänge mit Millimeter‑Genauigkeit zu landen, selbst wenn der Absprungswinkel um bis zu 15 Grad abweicht oder während des Flugs ein starker Ventilator mit 3,5 Metern pro Sekunde Wind bläst.
Weiche, stabile Landungen ohne Aufschlag
Hohe Sprünge führen normalerweise zu harten Landungen, die Hardware beschädigen oder Roboter zum Umstürzen bringen können. GravOff begegnet dem mit zwei Landemodi. Bei besonders harten Aufprällen dämpft ein weicher, 3D‑gedruckter Stoßdämpfer in jedem Bein die Energie. Für präzise Landungen auf kleinen oder bewegten Zielen zieht der Roboter aktiv seine Beine ein und streckt sie im genau richtigen Moment wieder aus, wodurch die Kontaktzeit mit dem Boden verlängert wird. Diese „aktive Dämpfung“ reduziert die Aufprallkräfte um den Faktor vier im Vergleich zur passiven Landung und kompensiert nahezu den eingehenden Impuls, sodass der Roboter beim ersten Bodenkontakt stehen bleibt, anstatt wegzuspringen.
Von Laborsprüngen zu Einsätzen in der realen Welt
Über kontrollierte Tests in Innenräumen hinaus zeigen die Autorinnen und Autoren, dass GravOff das Springen mit Kriechen und Rollen kombinieren kann, um mit realem Terrain klarzukommen. Er kann langsam über Gras, Sand, Kopfsteinpflaster und gerillten Asphalt kriechen, um eine sichere Absprungpose einzunehmen, und dann mit Hypogravitäts-Sprüngen Hindernisse wie mehrstufige Treppen, eine 2,35 Meter hohe Mauer oder einen drei Meter breiten Bach überwinden. Die Niedrigschwerkraft‑Strategie erweist sich zudem als deutlich energieeffizienter als reines Fliegen zum Überwinden mittelgroßer Hindernisse: In einigen Tests verbrauchten die Sprünge weniger als ein Zehntel der Energie, die für Schweben oder Fliegen über dasselbe Hindernis nötig gewesen wäre.
Was das für künftige Roboter bedeutet
Einfach gesagt zeigt diese Arbeit, dass Roboter weiter, genauer und sicherer springen können, indem sie vorgeben, die Schwerkraft sei schwächer, und ihre Flugbahn nach dem Absprung anpassen. Das Design von GravOff deutet auf künftige Erkundungsgeräte hin, die während der Katastrophenhilfe über Trümmer hüpfen oder auf anderen Planeten Klippen und Krater überqueren könnten — und dabei genau vorhersagen, wo und wann sie landen. Dieselben Ideen — Schwerkraft mit Schub ausgleichen und die Flugbahn in der Luft lenken — ließen sich vielen anderen springenden Robotern hinzufügen und könnten das Springen von einer riskanten Notlösung zu einer verlässlichen, geplanten Fortbewegungsart machen.
Zitation: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Schlüsselwörter: springende Roboter, Hypogravität, Schubvektorsteuerung, Beinige Fortbewegung, Trajektorienkontrolle