Clear Sky Science · de
Bioinspirierte spiking-Architektur ermöglicht berührungssensitive Kodierung bei Energieeinschränkungen
Warum klügere Berührung für Roboter wichtig ist
Unsere Fingerspitzen lassen uns in Bruchteilen einer Sekunde ein Sandkorn, ein rutschendes Glas oder einen sanften Klaps spüren — und das bei erstaunlich geringem Energieaufwand. Wenn Roboter aus Fabriken in Haushalte, Krankenhäuser und belebte Arbeitsumgebungen vordringen, benötigen sie ein ähnliches Tastsinn, um sicher mit Menschen und empfindlichen Gegenständen zu interagieren. Diese Studie stellt eine neue künstliche Haut und ein gehirninspiriertes Verarbeitungssystem vor, das Maschinen ermöglicht, Berührungsorte mit hoher Präzision zu erkennen und dabei den Energieverbrauch extrem niedrig zu halten — eine zentrale Voraussetzung für zukünftige mobile und kollaborative Roboter.
Eine flexible Haut, die unserer ähnelt
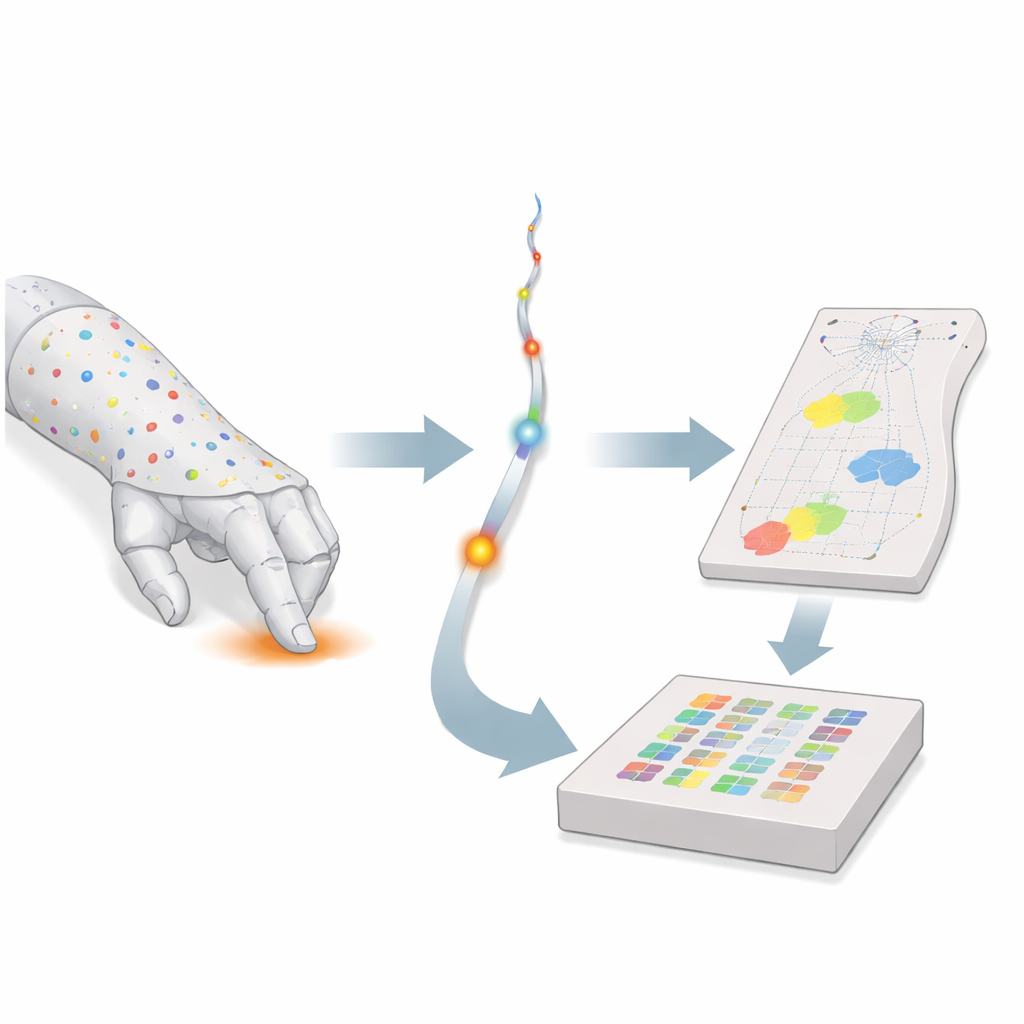
Die Forschenden bauten eine weiche Silikon‑„e‑Haut“, geformt wie ein menschlicher Unterarm, und verlegten 21 winzige optische Sensoren entlang einer haarfeinen Faser. Diese Sensoren, sogenannte Fiber Bragg Gratings, reagieren auf Dehnung und Biegung der Haut, indem sie die Farbe des in der Faser reflektierten Lichts verschieben. Weil die Faser unter der Oberfläche verläuft, ist jeder Sensor nicht nur für einen einzelnen Punkt, sondern für eine kleine Region empfindlich — ähnlich wie echte Mechanorezeptoren in unserer Haut verteilt sind. Einige dieser künstlichen Rezeptoren sprechen stark auf sehr lokale Druckreize an, andere reagieren breiter auf Verformungen, was dem entspricht, wie verschiedene Nervenendigungen im menschlichen Gewebe sowohl feine Details als auch die Gesamtform erfassen.
Berührung in elektrische Spike‑Signale übersetzen
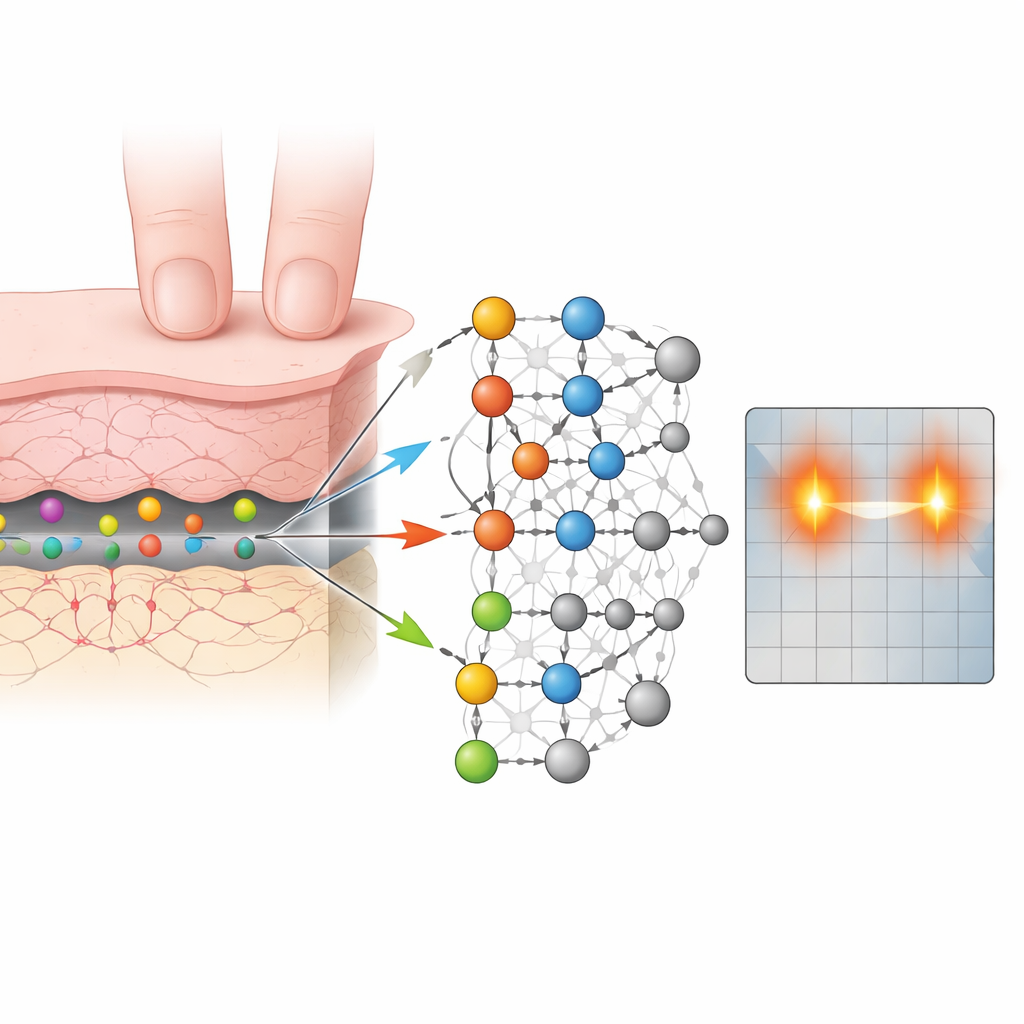
Um diesen reichen Datenstrom zu interpretieren, setzten die Forschenden nicht auf konventionelle Deep‑Learning‑Modelle, die Zahlenframes verarbeiten. Stattdessen näherten sie sich der Biologie näher, indem sie ein spiking neuronales Netz verwendeten, in dem Information als kurze elektrische Impulse oder „Spikes“ weitergegeben wird, ähnlich wie Nervenimpulse. Die optischen Signale der e‑Haut werden in Spike‑Ströme umgewandelt und in das Netzwerk eingespeist. Jeder Output‑Neurone dieses Netzes steht für einen bestimmten Punkt auf der Haut und bildet so eine zweidimensionale interne Karte der Oberfläche. Berührt etwas die e‑Haut, feuert ein Cluster von Neuronen in einem Muster, das den Berührungsort verrät; das System bestimmt die Position aus dem Zentrum dieser Aktivität.
Scharfere Wahrnehmung bei geringerem Ressourcenbedarf
Mit diesem Design lokalisiert das System einzelne Berührungspunkte am künstlichen Unterarm mit einem typischen Fehler von etwa drei Millimetern, übertrifft damit eine starke Deep‑Learning‑Baseline um rund ein Drittel und erreicht etwa eine zehnmal bessere räumliche Auflösung, als allein aus dem Sensorabstand zu erwarten wäre. Es funktioniert auch bei mehreren gleichzeitig gedrückten Punkten — bis zu vier gleichzeitige Kontakte — sowie bei manuellen Pressungen mit variierender Kraft und Richtung. Die Forschenden untersuchten verschiedene interne Verschaltungs‑Muster im Netzwerk und stellten fest, dass ein Layout, das von frühen Berührungswegen im Rückenmark inspiriert ist — in dem exzitatorische Zellen in inhibitorische Interneurone einspeisen, die benachbarte Ausgänge dämpfen — entscheidend ist, um die räumliche Detailtreue zu schärfen. Diese „laterale Inhibition“ erhält die Darstellung klar und verhindert das Verwischen, wenn Kontakte nahe beieinander liegen.
Entworfen für niedrigen Energieverbrauch, nicht nur für Genauigkeit
Ein zentrales Ziel der Arbeit ist es, den Energieverbrauch in Grenzen zu halten — ein Thema, das kritisch wird, wenn ein ganzer Roboterkörper mit Sensoren bedeckt ist. Das Team trainierte das Netzwerk unter steigendem Druck, weniger Spikes zu feuern, und ahmte so nach, wie die Evolution Leistung gegen metabolische Kosten abwägen musste. Unter unbeschränkten Bedingungen lieferte eine flexiblere, weniger biologisch realistische Architektur leicht bessere Resultate. Sobald die Spike‑Aktivität jedoch auf energieeffiziente Levels reduziert wurde, gewann die bioinspirierte Verschaltung tatsächlich: Sie erreichte höhere Genauigkeit bei gleichem Aktivitätsbudget. Die Forschenden portierten das Netzwerk anschließend auf einen Mixed‑Signal‑neuromorphen Chip, der Neurone und Synapsen direkt in analoger Elektronik realisiert. Auf dieser Hardware lief das taktile System während der Berührung mit weniger als einem Milliwatt und im Ruhezustand mit nur wenigen Mikrowatt, bei minimalem Präzisionsverlust.
Vom Labor‑Unterarm zu künftigen Roboterkörpern
Insgesamt zeigt diese Arbeit, dass die sorgfältige Kombination aus weicher, verteilter Sensorik und gehirnähnlicher spiking‑Verarbeitung Maschinen einen präzisen und schnellen Tastsinn verleihen kann, ohne hohe Energiekosten. Indem sie nicht nur die Leistung, sondern auch die Verschaltungsprinzipien früher Berührungswege im Nervensystem nachbildet, deutet das System an, warum die Evolution bestimmte Schaltkreis‑Motive bevorzugt haben könnte: Sie bieten hinreichende Genauigkeit unter strengen Energiegrenzen. Bei Skalierung könnten ähnliche e‑Häute und neuromorphe Prozessoren Robotern und Prothesen ermöglichen, Berührung über ihre Flächen wahrzunehmen, schnell auf unerwartete Stöße zu reagieren und in den komplexen, dynamischen Umgebungen, in denen Menschen leben und arbeiten, sicherer und natürlicher zu interagieren.
Zitation: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Schlüsselwörter: künstliche Haut, taktiles Sensorik, spiking neuronale Netze, neuromorphische Hardware, Robotiksicherheit